Test: Electrical Machines- 1 - Electrical Engineering (EE) MCQ
10 Questions MCQ Test - Test: Electrical Machines- 1

In an electromechanical energy conversion device, the developed torque depends upon
Consider the following statements:
The use of interpoles in dc machines is to counteract the
1. reactance voltage
2. demagnetizing effect of armature mmf in the commutating zone
3. cross-magnetizing effect of armature mmf in the commutating zone
Which of these statement(s) is/are correct?
1. reactance voltage
2. demagnetizing effect of armature mmf in the commutating zone
3. cross-magnetizing effect of armature mmf in the commutating zone

In an armature, if m is the number of slots per pole per phase and γ is the slot pitch angle, then the breadth or the distribution factor for the armature winding is
The current drawn by a 220V dc motor of armature resistance 0.5 Ω and back emf 200V is
A dc shunt generator when driven without connecting field winding shows an open circuit terminal voltage of 12V. When field winding is connected and excited, the terminal voltage drops to zero because
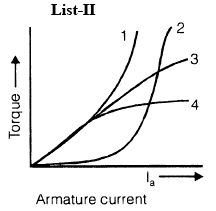
Match List-I (dc motors) with List-II (Characteristics) labeled 1, 2, 3 and 4) and select the correct answer:
An induction motor when started on load does not accelerate up to full speed but runs at 1/7th of the rated speed. The motor is said to be
The rotor power output of 3-phase induction motor is 15 kW. The rotor copper losses at a slip of 4% will be
Skewing of the rotor in a three-phase squirrel-cage induction motor reduces
In a shaded-pole induction motor, the rotor runs from the




Important Questions for Electrical Machines- 1
Electrical Machines- 1 MCQs with Answers
Online Tests for Electrical Machines- 1
|
© EduRev
|
Education Revolution
|



|









within 7 days!