Test: Introduction to Control Systems - 1 - Electronics and Communication Engineering (ECE) MCQ
10 Questions MCQ Test GATE ECE (Electronics) Mock Test Series 2025 - Test: Introduction to Control Systems - 1

As compared to an open loop system, a closed loop system is:
| 1 Crore+ students have signed up on EduRev. Have you? Download the App |
The most commonly used input signal(s) in a control system is/are:
The Laplace transform of a 4 second transportation lag element is
Consider the following statements regarding control systems:
1. In open loop control system, the control action depends upon the desired output.
2. All control systems operated by present timing mechanism are open loop.
3. in a closed loop control system feedback signal is usually negative.
4. In open-loop control system stability cannot be ensured.
Q. Which of the above statements are correct?
Assertion (A): Closed loop control systems are known as feedback control systems.
Reason (R): In closed loop control systems, the control action is dependent on the desired output.
As compared to a closed loop system, an open loop system is:
Which of the following are the not characteristics of the closed loop systems?
Assertion (A): The control system which operates on the time basis is an open loop system.
Reason (R): A field control d.c. motor is an example of open loop system.
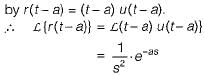
A ramp function occurs at t = a. It's Laplace transform is:
|
25 docs|263 tests
|
|
25 docs|263 tests
|
Top Courses for Electronics and Communication Engineering (ECE)




Important Questions for Introduction to Control Systems - 1
Introduction to Control Systems - 1 MCQs with Answers
Online Tests for Introduction to Control Systems - 1 GATE ECE (Electronics) Mock Test Series 2025
|
© EduRev
|
Education Revolution
|



|







