Test: Stability - Electronics and Communication Engineering (ECE) MCQ
15 Questions MCQ Test - Test: Stability

The forward-path transfer function of a ufb system is

For system to be stable, the range of K is





The open-loop transfer function of a ufb system is


The closed loop system will be stable if the value of K is


 satisfy this condition.
satisfy this condition.
 Then apply feedback formula with
Then apply feedback formula with  and
and  and then multiply with s2.
and then multiply with s2.

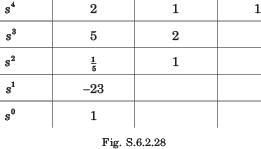
The poles location for this system is shown in fig.The value of K is




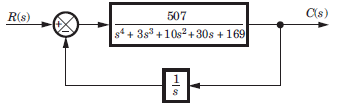
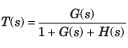
The forward-path transfer function of a ufb system is T(s) = 
The system is

The open loop transfer function of a system is as

The range of K for stable system will be

The open-loop transfer function of a ufb control system is given by

For the system to be stable the range of K is



If the roots have negative real parts, then the response is ____________
The closed loop transfer function of a system is

The number of poles in RHP and in LHP are

The closed loop transfer function of a system is

The number of poles in LHP, in RHP, and on jω - axis are




For the system shown in fig. the number of poles on RHP, LHP, and imaginary axis areS


For the open loop system of fig. location of poles on RHP, LHP, and an jω - axis are



Important Questions for Stability
Stability MCQs with Answers
Online Tests for Stability
|
© EduRev
|
Education Revolution
|



|








