Test: Fractional KW Motors of Electrical Machines- 1 - Electrical Engineering (EE) MCQ
10 Questions MCQ Test GATE Electrical Engineering (EE) Mock Test Series 2025 - Test: Fractional KW Motors of Electrical Machines- 1

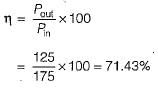
A 125 W, 4-pole, 110 V, 50 Hz single phase induction motor delivers rated output at a slip of 6%. The total copper loss at full load is 25 Watts. Rotational loss may be assumed to be 25 Watts. Neglecting stator copper loss, the full-load efficiency of the motor would be:


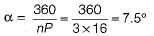
The stepping angle for a 3 - stack, 16-tooth variable reluctance motor is:
| 1 Crore+ students have signed up on EduRev. Have you? Download the App |
Consider the following statements related to an universal motor:
1. An universal motor runs on d.c. as well as on a.c.
2. No extra winding is required in a universal motor for ac operation.
3. The direction of rotation of universal motor can be reversed by reversing either the field or armature leads, but not both.
4. Universal motors are designed for operation at low speeds (less than 3500 rpm).
Of these, the correct statements are:
1. An universal motor runs on d.c. as well as on a.c.
2. No extra winding is required in a universal motor for ac operation.
3. The direction of rotation of universal motor can be reversed by reversing either the field or armature leads, but not both.
4. Universal motors are designed for operation at low speeds (less than 3500 rpm).
Of these, the correct statements are:
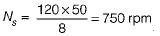
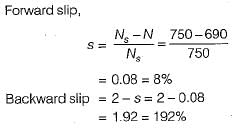
An 8-pole, 50 Hz, single phase induction motor is running at 690 rpm. It’s slip w.r.t. backward and forward fields respectively are:
Single phase ac motors are classified on the basis of
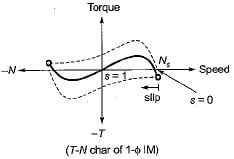
The torqued eveloped by a single phase induction motor drops to zero at
In a single phase induction motor
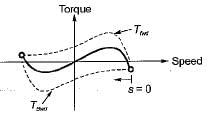
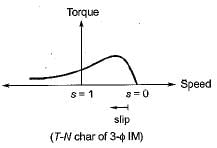
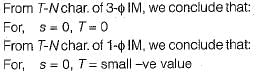
In a comparative study of the torque-slip characteristic of a balanced poly-phase induction motor and that of a single phase induction motor, it is found that for zero slip
Double revolving field theory is based on the idea that pulsating field produced in single phase motors can be resolved into two components of ______ its amplitude and rotating in______ direction with synchronous sped .
|
25 docs|247 tests
|
|
25 docs|247 tests
|
Top Courses for Electrical Engineering (EE)




Important Questions for Fractional KW Motors of Electrical Machines- 1
Fractional KW Motors of Electrical Machines- 1 MCQs with Answers
Online Tests for Fractional KW Motors of Electrical Machines- 1 GATE Electrical Engineering (EE) Mock Test Series 2025
|
© EduRev
|
Education Revolution
|



|







