Test: The Z-Transform - Electronics and Communication Engineering (ECE) MCQ
20 Questions MCQ Test - Test: The Z-Transform




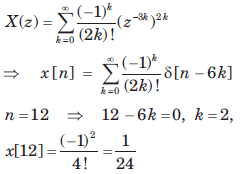
If z-transform is given by
X(z) = cos(z-3), |z| > 0
The value of x[12] is
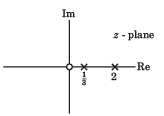
X(z) of a system is specified by a pole zero pattern in fig.
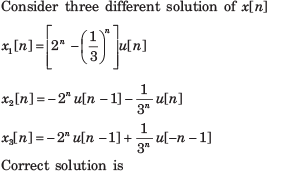
Consider three different signal
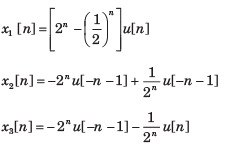
fig.shows the three different region. Choose the correct option for the ROC of signal
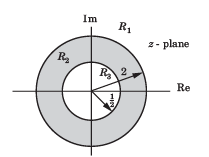
R1 , R2 , R3
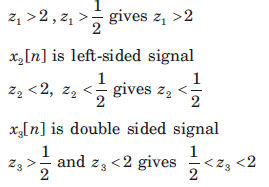
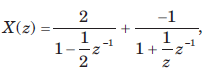
Given
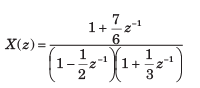
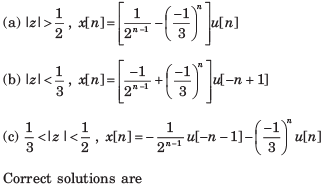
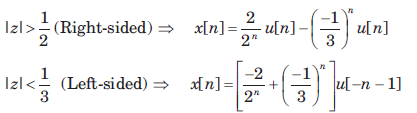
For three different ROC consider there different solution of signal x[n], (casual approch)

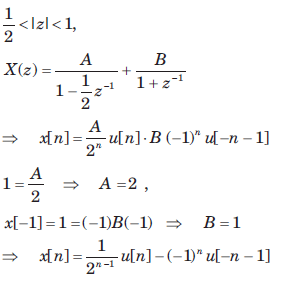
X(z) has poles at z =1/2 and z =-1.If x [1] = 1 x [-1] = 1, and the ROC includes the point z = 34. The time signal x[n] is
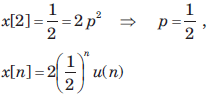
x[n] is right-sided, X (z) has a signal pole, and x[0] = 2, x[2] = 1/2. x[n] is

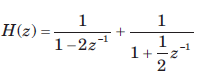
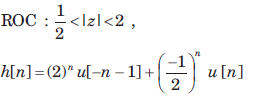
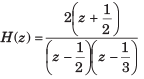
The z-transform function of a stable system is given as
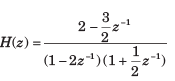
The impuse response h[n] is

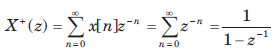
The z-transform of a signal x[n] is given by
If X (z) converges on the unit circle, x[n] is
The transfer function of a system is given as
Consider the two statements
Statement(i) : System is causal and stable.
Statement(ii) : Inverse system is causal and stable.
The correct option is

The impulse response of a system is given by
For this system two statement are
Statement (i): System is causal and stable
Statement (ii): Inverse system is causal and stable.
The correct option is


Consider the following three systems
The equivalent system are


The z-transform of a anti causal system is
The value of x[0] is

Important Questions for The Z-Transform
The Z-Transform MCQs with Answers
Online Tests for The Z-Transform
|
© EduRev
|
Education Revolution
|



|








