Flat Belt Drive | Mechanical Engineering SSC JE (Technical) PDF Download
FLAT BELT DRIVE
- The amount of power transmitted depends upon the following factors :
- The velocity of the belt.
- The tension under which the belt is placed on the pulleys.
- The arc of contact between the belt and the smaller pulley.
- The conditions under which the belt is used.
- The shafts should be properly in line to ensure uniform tension across the belt section.
- The pulley should not be too close together, in order that the arc of contact on the smaller pulley may be as large as possible.
- The pulleys should not be so far apart as to cause the belt to weigh heavily on the shafts, thus increasing the friction load on bearings.
- A long belts tend to swing from side to side, causing the belt to run out of pulleys, which in turn develops crooked spots in the belt.
- The tight side of the belt should be at the bottom. So that whatever slack is present on the loose side will increases the arc of contact at the pulleys.
- In order to obtain good results with flat belts, the maximum distance between the shafts should not exceed 10 meters and the minimum should not be less than 3.5 times the diameter of the larger pulley.
- Selection of a Belt Drive. It depends upon the following factors.
- Speed of the driving and driven shaft
- Speed reduction ratio v Power to be transmitted
- Centre Distance between the shafts
- Positive drive requirement
- Shaft layout
- Space available
- Service conditions
Types of belt Drives
- Based on Power Transmission
- Light drives : These are used to transmit small powers at belt speeds upto about 10 m/sec in agricultural machines and small machine tools.
- Medium drives : These are used to transmit medium powers at belt speeds over 10m/sec but upto 22m/sec, as in machine tools.
- Heavy drives : These are used to transmit large powers at belt speeds above 22 m/sec. as in compressor and generators.
Based on Arrangement
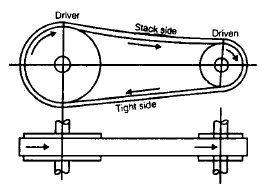
- Open belt drive. It is used with shafts arranged parallel and rotating in the same direction, when the centre distances between the two shafts is large, then the tight side of the belt should be the lower one.
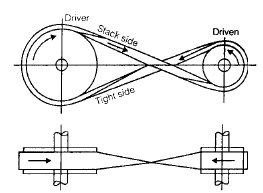
- Crossed or twist belt drive. It is used with shafts arranged parallel and rotating in the opposite direction. At a point where the belt rubs against each other and there will be excessive wear and tear. In order to avoid this the shafts should be placed at a maximum distance of 20 b, where b is the width of belt and the speed of the belt should be less than 15 m/s.
- Quarter turn belt drive. It is used with shafts arranged at right angles and rotating in one definite direction. In order to prevent the belt from leaving the pulley the width of the face of the pulley should be greater then or equal to 1.4 b.
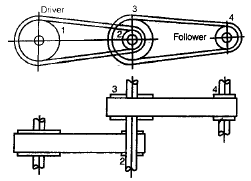
- Compound belt-drive. It is used when power is transmitted from one shaft to another through a number of pulleys.
- Belt drive with idler pulleys. It is used with shafts arranged parallel and when an open belt drive can not be used due to small angle of contact on the smaller pulley.This type of drive is used to obtain high velocity ratio and when the required belt tension can not be obtained by other means.
- Stepped or cone pulley. A stepped or cone pulley drive is used for changing the speed of the driven shaft while the main or driving shafts runs at constant speed. This is accomplished by shifting the belt from one part of the steps to the other.
- Fast and loose pulley drive. A fast and loose pulley drive is used when the driven or machine shaft is to be started or stopped whenever desired without interfering with driving shaft. A pulley which is keyed to the machine shaft is called fast pulley and runs at the same speed as that of machine shaft. A loose pulley runs freely over the machine shaft and in incapable of transmitting any power. When the driven shaft is required to be stopped the belt is pushed on the loose pulley by means of sliding bar having belt forks.
- Types of Belts
- Flat belt is mostly used in a factories and workshops, where a moderate amount of power is to be transmitted from one pulley to another pulley when two pulleys are not more than 8 meters apart.
- V-belt is mostly used in the factories and workshops, where a great amount of power is to be transmitted when two pulleys are very near to each other.
- Circular belt or rope is mostly used where a great amount of power is to be transmitted when two pulleys are more than 8 meters apart.
- Note
- If a huge amount of power is to be transmitted, then a single belt may not be sufficient. In such cases, wide pulleys with a number of grooves are used. Then a belt in each groove is provided to transmit the required amount of power from one pulley to another.
- The material used for belts and ropes must be strong, flexible and durable. It must have a high coefficient of friction.
- The balata belts should not be used at temperature above 40°C because at this temperature the balata begins to soften and becomes sticky. The strength of balata belts is 25 percent higher than rubber belts.
- When the speed of belt increases, the centrifugal force also increases which tries to pull the belt away from the pulley. This will result in the decrease of power transmitted by the belt. For the efficient transmission of power, the belt speed 20 m/s to 22.5 m/ s may be used.
- Coefficient of friction between belt and pulley depends upon :
- Material of belt
- The material of pulley
- The slip of belt
- The speed of belt
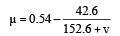
v = speed of belt in meter per minute, u = co-efficient of friction between belt and pulles.
Belt Joints
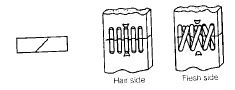
- The cemented joint made by the manufacturers to form an endless belt, is preferred than other joints. The laced joint is formed by punching holes in line across the belt, leaving a margin between the edge and the holes. A raw hide strip is used for lacing the two ends together to form a joint. This type of joint is known as straight-stitch raw hide laced joint.
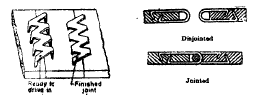
- Metal laced joint is made like a staple connection. The points are driven through flesh side of the belt and clinched on the inside.
- Sometimes metal hinged may be fastened to the belt ends and connected by a steel or fibre pin.
- Efficiencies of belt Joints
- Cemented, endless, cemented at factor 90 to 100%
- Cemented in shop 80 to 90%
- Wire laced by machine 75 to 85%
- Wire laced by hand 70 to 80%
- Raw-hide laced 60 to 70%
- Metal belt hooks 35 to 40%
- Velocity Ratio of a Belt Drive
- It is the ratio between the velocities of the driver and the follower or driven.
Let d1 = diameter of driver
d2 = diameter of follower
N1 = speed of driver in rpm
N2 = speed of follower in rpm.
Velocity ratio = 
When thickness of belt is considered then

where, t is the thickness of the belt
- In case of compound belt drive

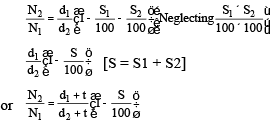
- Slip of Belt
- Sometimes the frictional grip becomes insufficient this may cause, some forward motion of the driver without carrying the belt with it. This is called slip of the belt and is generally expressed as a percentage. The result of the belt slippling is to reduce the velocity ratio of the system. Let
S1% = % slip between the driver and the belt.
S2% = % slip between the belt and follower.
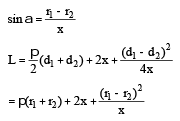
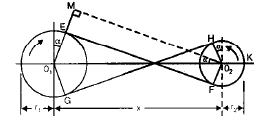
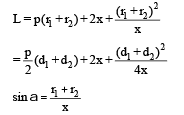
- Length of an open belt drive
Let, r1 and r2 = Radii of the larger and smaller pulleys
x = Distance between centers of pulleys
L = total length of the belt.
- Length of a cross belt drive
- In above expressions if sum of the radii of the two pulleys be constant; length of the belt required will also remain constant, provided the distance between centers of pulleys remain unchanged.
- Power Transmitted by a Belt
Let,T1 = Tension in the tight side in Newtons
T2 = Tension in the slack side in Newtons
V = velocity of the belt in m/s The effective turning force at circumference of the follower = (T1 – T2)
Work done = (T1 – T2). V N-m/s
Power transmitted =
- The torque exerted on the driving pulley is = (T1 – T2) r1
- The torque exerted on the driven pulley is = (T1 – T2) r2
- Creep of Belt
- Due to the difference of two tensions the belt continuously creeps (moves with a very negligible velocity) over the pulleys. This movement of belt is very small and is generally neglected.
- Ratio of Driving Tensions for Flat Belts

Let,T1 = Tension in the belt on the right side
T2 = Tension in the belt on the slack side
q = Angle of contact in radians.
The belt PQ is in equilibrium under the following forces:
- Tension T in the belt at P
- Tension (T + dT) in the belt at Q
- Normal Reaction RN
- Frictional force F = µ × RN
Angle of contact or lap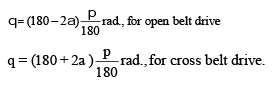
- When the pulleys are made of different material (when the coefficient of friction of the pulleys of the angle of contact are different), then the design will refer to the pulley for which µ . q is small.
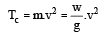
- Centrifugal Tension
- Since the belt continuously runs over the pulley, therefore some centrifugal force is caused, whose effect is to increase the tension on both the tight as well as the slack sides. The tension caused by centrifugal force is called centrifugal tension.
Let, w = weight of belt per unit length
m = Mass of belt per unit length (w/g)
V = Linear velocity of belt
r = radius of pulley over which the belt runs.
Tc = centrifugal tension acting tangentially at P and Q.
- total tension in the tight side,

- Total tension in the slack side,


- Maximum Tension in the Belt
Let, f = maximum safe stress
b = width of the belt
t = thickness of the belt area of belt = b.t.
- Maximum tension in the belt = T = maximum stress × cross-sectional
- When centrifugal tension is neglected then

- When centrifugal tension is considered then
- Condition for the Transmission of Maximum Power
P = (T1 – T2) V
and

if T = Maximum tension to which the belt can be subjected in N then T = 3Tc
- Initial tension in the Belt
- Since the motion of the belt and the follower is governed by a firm grip due to friction between the belt and the pulleys. In order to increase this grip the belt is tightened up. At this stage when the pulleys are stationary, the belt is subjected to same tension, called initial tension.
Let, T0 = Initial tension in the belt
T1 = Tension in the slack side of the belt
T2 = Tension in the slack side of the belt
a = Coefficient of increase of the belt length per unit force.
- Assuming that the belt material is perfectly elastic such that the length of the belt remains constant, when it is at rest or in motion therefore increase in length on the tight side is equal to decrease in the length on the slack side.
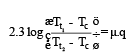
- In actual practice, the belt material is not perfectly elastic. Therefore the sum of tensions T1 and T2 when the belt is transmitting power, is always greater than twice the initial tension, then according to C.G. Berth.

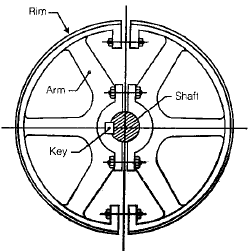
- Flat Belt Pulleys
- The pulleys may be made of cast iron, cast steel or pressed steel, wood and paper. The cast materials have good friction and wear characteristics. The pulleys made of pressed steel are lighter than cast pulleys, but in many cases they have lower friction and may produce excessive wear.
- The rim is held in place by web from the central boss or by arms or spokes. The arms may be straight or curved and the cross-section is usually elliptical.
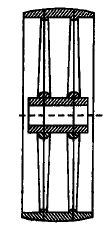
- The cast-Iron pulleys are generally made with rounded rims. This slight convexity is known as crowning. The crowning tends to keep the belt in centre on a pulley rim while in motion. Cast Iron pulleys may be split type.
- A sunk key is used for heavy drives.
- Steel pulleys are made from pressed steel sheets and have great strength and durability.
Length of the hub = 
Thickness of rim = 5 mm for all sizes
- A single row of spokes is used for pulleys having width upto 30 cm and double row of spokes for width above 30 cm.
- The rim of the fast pulley is made larger than the loose pulley so that the belt may run slackly on the loose pulley. The loose pulley usually have longer hub in order to reduce wear and friction and requires proper lubrication.
- The number of arms may be taken as 4 for pulley diameter from 200 mm to 600 mm and 6 for diameter from 600 mm to 1500 mm. The pulleys less than 100 mm diameter are made with solid disc instead of arms. The thickness of solid web is taken equal to the thickness of rim measured at the centre of the pulley face.
- The cross-section of the arms is usually elliptical with.
- Major axis equal to twice the minor axis
- the cross-section of the arm is obtained by considering the arm as cantilever i.e., fixed at hub end and carrying a concentrated load at the rim end.
The length of the cantilever is taken equal to the radius of the pulley.
Let, T = Torque transmitted
R = Radius of pulley
n = Number of arms.
Maximum Bending moment

Section modulus

When the width of the pulley exceeds the diameter of the pulley, then two rows of arms are provided. This is done to avoid heavy arms in one row.
If d = diameter of shaft diameter of hub d1 = 1.5d + 25 mm length of hub

 ,
,
But L is not be more than width of pulley (B).
|
5 videos|103 docs|59 tests
|
FAQs on Flat Belt Drive - Mechanical Engineering SSC JE (Technical)
| 1. What is a flat belt drive in mechanical engineering? |  |
| 2. What are the advantages of using a flat belt drive? | |
| 3. How can the tension in a flat belt drive be adjusted? | |
| 4. What are the limitations of a flat belt drive? | |
| 5. How can the lifespan of a flat belt drive be increased? | |

|
2.2K Views |

|
4.79/5 Rating |

|
Dec 26, 2024 Last updated |
|
5 videos|103 docs|59 tests
|

|
Explore Courses for Mechanical Engineering exam
|
|
Flat Belt Drive | Mechanical Engineering SSC JE (Technical)
,shortcuts and tricks
,Summary
,MCQs
,Flat Belt Drive | Mechanical Engineering SSC JE (Technical)
,mock tests for examination
,study material
,Flat Belt Drive | Mechanical Engineering SSC JE (Technical)
,Important questions
,Sample Paper
,past year papers
,Extra Questions
,practice quizzes
,Exam
,Objective type Questions
,video lectures
,Semester Notes
,Free
,Previous Year Questions with Solutions
,Viva Questions
,ppt
;






Flat Belt Drive Free PDF Download
Importance of Flat Belt Drive
Flat Belt Drive Notes
Flat Belt Drive Mechanical Engineering Questions
Study Flat Belt Drive on the App
|
© EduRev
|
Education Revolution
|



|




