Polyphase Induction Machine | Electrical Engineering SSC JE (Technical) - Electrical Engineering (EE) PDF Download
POLY PHASE INDUCTION MACHINES
INTRODUCTION
- A polyphase induction motor is a singly-excited a.c. machine in the sense that it supplied power from a single ac source
- Its stator winding which is directly connected to a.c. source, and its rotor winding receives energy from stator by means of induction.
- Balanced polyphase current in polyphase winding produce a constant-amplitude rotating m.m.f wave. The stator and rotor m.m.f waves combine to give the resultant air-gap flux density wave of constant amplitude and rotating at synchronous speed.
- Since an induction motor can't run at synchronous speed, it is called asynchronous machine.
CONSTRUCTIONAL REATURES
Stator
- The stator of an induction. Motor (IM) consists of stator frame, stator core, polyphase (3 or 2-ø)distributed winding, two end covers, bearing etc. The stator core is a stack of cylindrical steel laminations which are slotted along inner periphery for 3-phase winding.

- Three coils aa', bb' and cc' represent the windings of the three phases a, b and c respectively. Three winding are space displaced by 120° electrical and may be connected in star or delta.

- Three-ø winding in the stator slots is uniformly distributed along the air-gap periphery.
Remember:
- The air gap between stator and rotor should be as small as possible, this will
- reduce the leakage flux between stator and rotor.
- gives better operating power factor of the IM.
Rotor
- The IM has two types of Rotors
- Squirrel two types of Rotors
- Wound rotor (Slip ring rotor)
Squirrel cage rotor
- Rotor windings consists of uninsulated conductor in the form of copper or aluminium bars embedded in semi-closed slots.
- Solid bars are short circuited by end rings of same material. These are welded, brazed or riveted with two end rings for better electrical connection.
- No external resistance can be inserted in the rotor circuit of a cage IM.

Wound-Rotor
- The rotor windings is uniformly distributed and is usually connected in star. The three leads form the star connection are then connected to three slip rings or collector rings mounted on but insulated from the shaft.
- The external resistors are inserted in series with the rotor winding for speed and starting torque control.
Remember.
- Wound rotor IM used where
- speed control is required
- High starting torque is required.
- In both the type the rotor slots are skewed for obtaining a quieter and smoother operation of the IM.
I.M. AS A TRANSFORMER
- Induction motor is similar to transformer in many features.
- The stator and rotor windings are in star and rotor winding is assumed to be open circuited. So that rotor current is zero and no electromagnetic torque is developed.
- application of three balanced phase voltages at line frequency f1 to the stator winding causes the production of a rotating magnetic field. This rotating flux cuts both the stator and stationary rotor conductor at synchronous speed, emfs of line frequency f1 are induced in them.
- Per phase value of induced emf E1 in stator winding

Here, N1 = stator series turns per phase
kw1 = stator winding factor
- Per phase value of emfs induced in the standstill rotor winding

N2 = rotor series turns per phase
kw2 = rotor winding factor
- The emf or voltage ratio

- Here N'1 and N'2 are called the effective member of the stator-series turns per phase and rotorseries turns per phase. it is similar to the voltage ratio of a transformer.
Note:
- A WRIM at standstill is similar t a transformer at no load.
- 3–Ø IM with its blocked rotor is similar to the short circuit of transformer
- Stator and rotor winding of IM possess leakage reactance and resistance similar to transformer.
Difference between IM and Transformer
- In IM motor, winding is distributed along the air gap periphery, in transformer primary and secondary windings being concentrated, require no winding factor and maximum value of core flux is used.
- In M no load current varies from 30 to 50% of full load current where as in transformer no load current varies from 2 to 6% of full load. This is because in IM mutual flux crosses the air gap between stator and rotor whereas in transformer mutual flux complete its path through low reluctance path of iron.
ROTATING MAGNETIC FIELD
- When balanced polyphase current flow in balanced polyphase windings, a rotating magnetic field is produced for a 3-f machine, the three windings are displaced from each other by 120° electrical space degree along the air-gap periphery.

- These windings are excited respectively by threephase balanced currents

- These currents in phase windings a, b, c set up three pulsating mmf of waves in the air gap. These mmfs are directed along the magnetic axis of phases a, b, c.
- The three mmfs Fa' Fb and Fc can be expressed mathematically as
Fa = Fm cosα cos ωt
Fb = Fm cos (α – 120°) cos (ωt – 120°)
Fc = Fm cos (α – 240°) cos (ωt– 240°)
Note:
- Angle α is measured from the axis of phase a as shown in figure.
- The resultant mmf
Fr(α, t) = Fa + Fb + Fc
Fr(α, t) = 
- Above equation represents a travelling mmf wave of constant amplitude 3/2 Fm.

- The entire waveform is travelling along the air gap circumference at a constant angular ω = 2πf electrical radians per second (called synchronous speed) For a P-pole machine, the synchronous speed ωm.


Remember:
- If phase sequence of supply current is reversed (by inter changing any two supply terminals) the direction of rotation of magnetic field will be reverse.
- magnetic filed rotates at a speed Ns with respect to the windings.
PRINCIPLE OF OPERATION
- If rotor is shorted it self then induced current are flowing in the rotor winding. The direction of these induced current according to the Lenz's law is such as to oppose very cause of its production. The cause of there production is the relative speed between stator field rotor conductor.
- To oppose the relative speed between them rotor also starts rotating in the same direction as magnetic field at a speed Nr < Ns.
Note:
- The rotor speed always less than Ns, as if rotor runs as Ns, there will be no relative motion, stator field and rotor conductor hence no induced emf, no induced current, no torque production hence no rotation.
ROTOR FREQUENCY
- At stand still, rotor conductors are being cut by rotating flux wave at synchronous speed ns, therefore frequency f2 of the rotor emf and current is equal to the line frequency f1. When rotor revolves at a speed of nr rps in the direction of rotating flux wave, the relative speed between synchronously rotating flux and rotor conductors becomes (ns –nr) rps.
- Frequency of rotor emf

- Slip,

- Rotor frequency,
- The frequency of the rotor emf and current in an induction motor is given by the product of slip s and the line frequency f1. It is for this reason that f2 is also called the slip frequency.


ROTOR POWER
- Per phase input to rotor,
Pg = E2 I2 cosθ2

- Out or shaft torque

Pg = stator power input-stator I2 R loss–stator core loss
LOSSES AND EFFICIENCY
Fixed Losses
- These losses are composed of
- core loss
- bearing friction loss
- brush friction loss in wound-rotor induction motors (WRIMs) only
- windage loss.
Variables Losses
- These losses are composed of
- stator ohmic loss
- rotor ohmic loss
- brush contact loss for WRIMs only
- Stray load los

Power flow diagram for a 3-phase induction motor
- The efficiency of a 3-phase induction motor

Where
Psh = shaft power
Pf = fixed losses = core loss + friction and windage losses
Poh = stator and rotor ohmic losses + brush contact loss (if any)
ANALYSIS OF THE EQUIVALENT CIRCUIT

- In above figure Rc is ignored, but loss represented by Rc, i.e. core-loss, must be accounted for along with friction and windage losses.
- Steady-state performance parameters of the induction motor, such as current , speed, torque, losses etc. can be computed from the equivalent circuit of shown below figure.

- In above figure Zf is the per-phase impedance offered to the stator y the rotating air-gap field. Note that Zf includes the reflected effect of rotor leakage impedance and the magnetizing reactance Xm.
 and the magnetizing reactance Xm.
and the magnetizing reactance Xm.
- Impedance as seen by the stator applied voltage V1
Z1 = r1 + jx1 + Zf
- Stator current, I1 = V1/Z1
- Per-phase air-gap power.

TORQUE-SLIP CHARACTERISTICS
- By Thevenin's theorem, the circuit consisting of r1, x1, Xm and source voltage V1 can be replaced by an equivalent voltage source Ve and an equivalent impedance as shown in figure.
 as shown in figure.
as shown in figure.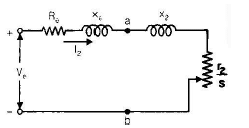
Where 
and 
- Here is the voltage appearing across terminals a, b with the rotor circuit disconnected from these two points. Equivalent stator impedance is the impedance viewed from terminals a, b towards the voltage source and with source voltage short circuited.
- For most induction motors (x1+Xm) is much greater than r1
 is the voltage appearing across terminals a, b with the rotor circuit disconnected from these two points. Equivalent stator impedance
is the voltage appearing across terminals a, b with the rotor circuit disconnected from these two points. Equivalent stator impedance  is the impedance viewed from terminals a, b towards the voltage source and with source voltage short circuited.
is the impedance viewed from terminals a, b towards the voltage source and with source voltage short circuited. 
and 

Here X1 = x1 + Xm, is the stator self-reactance per phase.
- Rotor current

- The total torque

Here m is the number of stator phase

where, 
- Depending upon the value of slip an induction motor can have the following operating regions or modes.

Motoring Mode: (0 < s ≤ 1)
- In this mode, the Rotor rotates in the direction of rotating field produced by the stator currents and slip varies from 1 at standstill to zero at synchronous speed.
Generating Mode: (s<0)
- An IM will operate in this region only when its stator terminals are connected to constantfrequency voltage source and its rotor is driven above synchronous speed, by prime mover.
- If stator is disconnected from voltage source and rotor is drive above synchronous speed by prime mover no generating action would take place.
Braking Mode: (s >1)
- This mode, can be obtained by driving the rotor, with prime mover, opposite to the direction of rotating field.
- Slip more than 1 is obtained by bringing the rotor to a quick stop by braking action, called plugging.
- For obtaining plugging, any two stator leads are interchanged. With this the phase sequence is reversed and the direction of rotating magnetic field becomes suddenly opposite to that of the rotor rotation.
- The electromagnetic torque Te acting opposite to rotor rotation, produces the braking action.
- Thus the motor can be quickly brought to rest by plugging, but the stator must be disconnected from the supply before rotor can start in the other direction
Maximum Internal Torque
- Also called as stalling torque, pull-out torque or breakdown torque Tem.
- Torque would be maximum. When power delivered to r2/s is maximum.
- When impedance r2/s becomes equal to the magnitude of impedance seen by r2/s towards the voltage source Ve, the power absorbed by r2/s will be maximum.
- Condition for maximum internal torque

where X = x2 + Xe
- The slip smT at which maximum torque occurs

- Maximum torque

Remember:
- The slip at which maximum torque occurs is directly proportional to the rotor resistance r2, but indicates that maximum torque Tem is independent of r2.
- If r2 is increased by inserting external resistance in the rotor circuit of a woundrotor induction motor, the magnitude of maximum internal torque is unaffected but the slip at which it occurs is affected proportionally.

Induction motor torque-slip curves with different values of rotor-circuit resistances
Observations:
- Tem is directly proportional to the square of stator voltage.
- Tem is reduced by an increase in stator resistance 1.
- Tem is reduced by increasing in stator leakage reactance x1 and rotor leakage reactance x'z.
- For obtaining higher value of maximum torque the air gap is kept as small as possible. A small air allows more flux to be mutual between stator and rotor windings.
Observations:
- The speed of motor can be controlled by varying rotor circuit resistance but maximum torque remains unaffected
- The starting torque can be varied by changing the rotor circuit resistances
- The line current taken by the motor shall also vary with rotor circuit resistance.
- The power factor at starting is also affected by rotor circuit resistance.
For obtaining better performance of the IM starting torque is increased by inserting a suitable external resistance in the rotor circuit at starting.
Starting Torque
- Starting torque

- To get maximum starting torque, the rotor-circuit resistance must be increased to
- New value of rotor-circuit resistance can be obtained by inserting external resistance equal to in the rotor circuit at the time of starting.

 in the rotor circuit at the time of starting.
in the rotor circuit at the time of starting.Motor Operation Near Synchronous Speed
- When slip is small, r2/s becomes quite large

Motor Torque in Terms of Tem

Since r1 or Re neglected

r2 = smt X (∵Re = 0) slip for maximum torque substitute value of r2 in above equation

or 
POWER-SLIP CHARACTERISTICS
- The total internal mechanical power developed

- Slip at which power developed is maximum

- Maximum power,

- Pmm depends on rotor resistance r2 whereas Tem does not.
- At starting, slip s= 1 and internal mechanical power developed Pm is zero
- When slip s = 1, the air-gap power transferred from stator to rotor is I22 r2 and this all appears as ohmic loss in the rotor circuit and, therefore, the mechanical power developed Pm is zero.
However, 
Remember:
- power Pm during plugging is returned to the supply.
As slip s is more than 1 during plugging, shows that Pm is negative. Whereas Te is positive during plugging or braking region

power-slip curve for an induction machine
- In order to get maximum power output from an induction generator. The rotor must be driven at a speed

EQUIVALENT CIRCUIT PARAMETERS
The equivalent circuit parameters of induction motors can be determined from the following test.
No-load (or running light test)
- The induction motor is made to run at no load at rated voltage and frequency. per phase values of applied stator voltage Vnl' input current Inl and input power Pnl are recorded.
- The no-load slip snl is very small, therefore, r2/snl in figure is very large as compared to Xm. In view of this resultant of parallel of branches jXm and is almost equal to jXm.
 is almost equal to jXm.
is almost equal to jXm.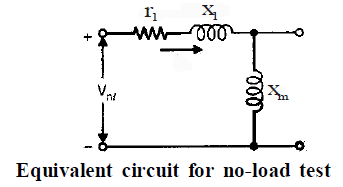
- The no-load reactance Xnl Seen from the stator terminals
Xnl =x1 + Xm = X1
- Stator no-load impedance and stator no-load resistance,
 and
and 
- The rotational losses Pr (friction, windage loss and core loss) are usually assumed constant and can be obtained from the relation

where m is the number of stator phases and r1 is the phase stator resistance.
Blocked-rotor Test
- Used to calculate leakage impedance of impedance motor.
- The rotor shaft is blocked by external means. Now balanced polyphase voltages at rated frequency are applied to the stator terminals through a polyphase variac.
- The applied voltage is adjusted till rated current flows in the stator winding. Per phase values of applied voltage Vbr' input current (= rated current) Ibr and the input power Pbr are recorded.
- Current Ibr may be affected by rotor position, in view of this the rotor should be held in a position that gives Ibr equal to the mean of maximum and minimum current values.
- Measure the d.c. resistance per phase of the stator winding soon after this test and multiply it by 1.1 to 1.3 in order to obtain the per phase effective stator resistance r1.

- The blocked-rotor impedance,

- The blocked-rotor resistance,

- Blocked-rotor reactance,

- Usually the magnetizing reactance Xm >> rotor leakage reactance X2,/Xm is negligibly small and this gives
Xbr = x1 + x2
- For wound-rotor induction motors, x1 is assumed equal to x2, i.e. x1 = x2 = 1/2 Xbr.
- Once x1 is known, the other parameters can be found by the following equations.
- The stator magnetizing reactance is
Xm = Xnl – X1
- Blocked-rotor resistance Rbf as seen form th stator terminals

- Per phase rotor resistance,

Remember:
- Friction and windage loss can be computed from the no-load test.
- Under normal operation of the induction motor, the rotor core-loss is usually negligible.
- The power input to the induction motor at noload has to supply the stator copper loss, core loss and friction and windage loss.
- The d.c. resistance of the stator winding is measured and its per phase effective value r1 is calculaed from the relation r1 = (1.1 to 1.3) d.c. resistance of one phase).
- As the motor speeds up, the rotor frequency decreases and with it the rotor core-loss decreases accordingly. Under normal running rotor, the slip is small (0.02 to 0.05), the rotor frequency is also very small.

STARTING 3-ø IM
Remember:
- A 3-ø induction motor has positive finite starting torque.
- 3-ø induction motor is a self-starting motor and begins to rotate on its own when connected to a - f source.
- A 3-ø induction motor takes high starting current if started at full voltage. In order to limit this high starting current to reasonable values, some methods are adopted for starting of 3-ø induction motors.
Starting of Squirrel-Cage Motor
Direction-on-line (Across-the-line) Starting
- The motor takes low-power factor starting current of 5 to 7 times its full-load current, depending upon its size and design. Such large currents of short duration don't harm the rugged squirrel cage motor, but the high currents may cause objectionable voltage drop in the power supply lines feeding the induction motor. These large voltage drops cause undesirable dip in the supply line voltage; consequently the operation of other equipments connected to the same supply line is effected considerably.
- If the supply system is of sufficient power capacity and the low-power factor starting-current surges don't cause objectionable voltage dips in the supply line voltage, then the direct-on-line starting should be preferred.
- Let Ist and Ifl be the per-phase stator current drawn from the supply mains corresponding to starting and full-load conditions respectively

- Equation is valid in case rotor resistance remains constant. Actually, rotor resistance varies with the frequency of rotor current; at starting rotor frequency is 50 Hz and a full load it is only a few hertz.
- If no-load current is neglected, then Ist × effective stator turns = I2st × effective rotor turns
or Ist = I2st (effective rotor to stator turns ratio)

- If V1 is the per phase stator voltage and Zsc is the standstill per phase leakage impedance referred to stator then per phase short-circuit current at standstill (or at starting) is,

- For direct switching,


Stator Resistor (or Reactor) Starting
- In this method, a resistor or a reactor is inserted in between motor terminals and the supply mains.

- Only a fraction x (less than 1) of the supply voltage appears across the stator terminals. This reduces the per-phase starting current Ist drawn by the motor from the supply mains. As the motor speeds up the reactor is cut out in steps and finally shortcircuited when the motor speed is near to its operating speed.
- Per-phase voltage is reduced to xV1.
- The per-phase starting current


or 
Auto-transformer starting
- A fraction xV1 of the supply voltage V1 is applied to the stator terminals at the times of starting, by means of an auto-transformer.

- After the motor has accelerated near to its operating speed, auto-transformer is disconnected and full line voltage is applied to the induction motor by connecting it directly across the supply mains.
- Per-phase starting current in motor windin

- If no-load current of auto-transformer is neglected, then per phase output VA of autotransformer must be equal to its per phase input VA
Ist. V1 = xV1 (xIsc)
- Per-phase starting current from the supply mains
Ist = x2. Isc
- Motor starting current per-phase is reduced only to x times the direct switching Isc; but the perphase starting from the supply mains is reduced to x2 times the direct switching Isc



- For an induction motor, torque μ (voltage)2

Remember:
- In auto transformer starting, both starting current and torque are reduced by same factor.
Star-delta Starting
- This method of starting is used for motors designed to operate normally in delta.

- The stator phases are first connected in star by throwing the triple pole double throw (TPDT) switch to position 1 and after steady-state speed has reached, TPDT is thrown over to position 2, there by connecting the stator winding in delta.
- Let VL be the line voltage. Then per phase motor starting current Ist with stator winding in star
- Starting line current with direct switching would be equal to



- With star-delta starter, the starting current from the mains is one-third of that with direct switching in delta

- Star-delta also reduces the starting torque to onethird of that produced by direct switching in delta.
- With star delta-starter, a motor behaves as if it were started by an auto-transformer starter with x1/√3 i.e. with 58% tapping



Speed Control of Induction Motor
- The rotor speed of an induction motor is given by

From above, it is seen that speed can be changed by a change in frequency f, number of poles P or slip s.

V → xV
x < 1
T → x2T
R1x1 = 0


at low slip 
To maintain same Tfl

if s' = 2s
⇒ V2s = V'2 (2s)
⇒ V' = 1/√2V
⇒ I'2 = sV/R'2
⇒ 

for the same load torque its speed is to be decreased by reducing the voltage, 1/√2 if slip is double by reducing the stator voltage times. The full load current is increases by a factor √2. That create excessive stress, moreover torque reduces drastically. (Narrow range of speed control)
Rotor resistance control: (only for SRIM)
R'2 = R'20 + Rext
wide range of speed control
- The only disadvantage of this method is that, the slip power is to be wasted in external resistor. So efficiency is poor however, if slip power is return to the supply, efficiency is improve that scheme is called slip power recovery scheme.
Frequency Control



i.e. 


V/f Control


 constant
constant
Stator impedance R1, x1, ≌ 0

nominal voltage V0 is rated nominal frequency f0



Speed 


rotor reactance



Slip for maximum torque




at nominal V0 ,fo



Wide range of speed control if
f > f0
V = V0


COGGING
- The phenomenon of magnetic locking between stator and rotor teeth is called cogging or teeth locking.
- If stator slots are equal to rotor slot or integral multiple of rotor slot then magnetic locking occurs.
- Due to this phenomenon 3-f cage induction motor fails to start. While full voltage is applied.
- The reluctance of the magnetic path is minimum when the stator and rotor teeth face each other Under this condition there is magnetic locking between stator and rotor teeth,
- The variation in reluctance as a f unction of space is pronounced and results in strong alignment forces at the instant of starting.

- Let at the time of starting stator teeth and rotor teeth are aligned. When the rotor tries to rotate, reluctance in the path of flux increases hence flux trying to keep stator teeth and rotor teeth align to follow low reluctance path.
- If starting torque is very small then alignment force per pole is more than the starting torque, then cogging phenomena will. occur. Alignment force < Tst.
Remember:
- The cogging phenomena occurs in SCIM as starting torque is low.
- To avoid cogging phenomena such combination of stator and totor slots are avoided.
- Cogging can also be reduced by using skewed rotor.
CRAWLING
- Certain combination of stator and rotor slots (not necessarily integral multiple) leads to certain space harmonics in mmf wave. e.g. if 5th and 7th space harmonics are present in mmf wave due to certain combination of slots S1 and S2.
- Fictitious number of poles corresponding to 5th harmonics P5 = 5P Speed of rotating field due to 5th harmonics

electrical angle corresponding to 5th space

- For fundamental space displacement of three windings, B Lags A by 120°, C lags A by 240°. Three phase

- The space sequence, corresponds to 5th harmonic is reversed that of fundamental, hence 5th harmonics field rotates in the opposite direction to that of fundamental field.
- 5th space harmonics field rotates in the opposite direction to that of fundamental at Ns/5 i.e. backward rotating field at Ns/5.
For 7th harmonics:



- 7th harmonics field rotates in the same direction of fundamental at (Ns/7).i.e. forward starting field at (Ns/7).

- Due to the presence of seventh harmonics in flu> torque, the load torque curve intersects the moto torque-speed characteristic at point A. Since the seventh harmonic flux torque curve has negative slope.
- Due to this, the motor torque falls below the load torque. At this stage the motor will not accelerate up to its normal speed but will remain running at a speed which is nearly (1/7) of its normal speed and operating point would be A.
- This tendency of the motor to run at a stable speed low as 1/7th of the normal speed Ns and being unable to pickup its normal speed is known as crawling of the motor.
- Crawling can b reduced be reducing fifth and 7th harmonics. This can be done by using a chorded (or short pitched) winding.

- Due to the presence of harmonics there is additional stable region at a speed near Ns/7. In torque speed characteristics for a particular load torques as shown the motor runs stably at reduced speed N1/<<N0 very less than rated No.
Note:
- Corresponding to triplen harmonics 3,9,15,21, The windings is not balanced means difference is not 120°. Hence they will not generate any rotating field.
Remember:
- Cogging and crawling are much less prominent in wound rotor motors because of there higher starting torques
DEEP BAR ROTOR
- A cage rotor with deep and narrow bars. A bar may be assumed to be made up of number of narrow layers connected in parallel. which are shown in figure

Good running performance

- The SRIM is superior to SCIM as external resistance can be added to improve starting performance and to improve the running performance. The external resistance is remove so high rotor resistance at starting , low rotor resistance in running.
frequency induced current in rotor f2 = sf slip frequency
at starting i.e. s = 1, f2 = f = 50 high s = 0.02, f2 = sf
= 2Hz small rotor bar can be assumed as a combination of strips

- Top most layer element is linked with minimum leakage flux and therefore, its leakage inductance is minimum on the other hand, the bottom strip links with maximum leakage flux, therefore its leakage inductance is maximum
- The resulting large cross-sectional area makes the rotor resistance quite small resulting in a good efficiency at low slips.
- The flux linking with the strips decreases progressively from lower strip to top strip

- Due to the difference in the reactance, the current flowing through the strips increases progressively from bottom strip to top strip. This effect is dominant at the time of starting. Hence at starting Ø2 is higher and starting current distribution in non uniform. Current progressively decreases from top to bottom, hence effective resistance is higher at the time of starting. Total leakage flux of rotor with deep bar design is some what higher than the normal design and hence leakage reactance, x2 -with deep bar rotor design.

DOUBLE CAGE ROTOR
- For obtaining high starting torque at low starting current, Upper strip cross-sectional area is smaller than that of lower stip.
- Cross section area of upper and lower cages are separated by their air constriction flux.


- From figure the leakage flux linking the inner cage winding is much larger than that of the upper cage winding, and the lower winding therefore, has a greater self inductance.

xl > xu at starting f2 – ll < lu
at the time of starting the reactance of lower bar is large as compare to that of upper bar hence starting current flows mainly to the upper bar, that is high resistance. Effective resistance of rotor at the time of starting ≌ Rpu
- In the running condition at low frequency the mismatch in reactance is negligible and hence rotor current flows through both bar.

- At starting the voltage induced in the rotor is same as the supply frequency (f2 = f1). Hence, the leakage reactance of the lower-cage winding = 2πfL is much larger than that of the outer-cage winding Therefore most starting current is flowing in the outer-cage winding which offers low-impedance to the flow of current.
|
23 videos|89 docs|42 tests
|
FAQs on Polyphase Induction Machine - Electrical Engineering SSC JE (Technical) - Electrical Engineering (EE)
| 1. What is a poly phase induction machine? |  |
| 2. How does a poly phase induction machine work? | |
| 3. What are the advantages of using a poly phase induction machine? | |
| 4. What are the different types of poly phase induction machines? | |
| 5. What are the applications of poly phase induction machines? | |

|
2K Views |

|
4.69/5 Rating |

|
Dec 22, 2024 Last updated |
|
23 videos|89 docs|42 tests
|

|
Explore Courses for Electrical Engineering (EE) exam
|
|
shortcuts and tricks
,Free
,Polyphase Induction Machine | Electrical Engineering SSC JE (Technical) - Electrical Engineering (EE)
,Objective type Questions
,MCQs
,past year papers
,Summary
,ppt
,video lectures
,Sample Paper
,Exam
,Previous Year Questions with Solutions
,Semester Notes
,Polyphase Induction Machine | Electrical Engineering SSC JE (Technical) - Electrical Engineering (EE)
,Viva Questions
,Extra Questions
,practice quizzes
,study material
,mock tests for examination
,Polyphase Induction Machine | Electrical Engineering SSC JE (Technical) - Electrical Engineering (EE)
,Important questions
;






Polyphase Induction Machine Free PDF Download
Importance of Polyphase Induction Machine
Polyphase Induction Machine Notes
Polyphase Induction Machine Electrical Engineering (EE) Questions
Study Polyphase Induction Machine on the App
|
© EduRev
|
Education Revolution
|



|




