Conservation of Momentum | Physics for EmSAT Achieve PDF Download

Conservation of momentum
There are two kinds of forces that act in a body. They are:
1. Contact forces
2. Body forces
Contact forces arise due to contact between two bodies. Body forces are action at a distance forces like gravitational force. Similarly, while contact forces act per unit area of the boundary of the body, body forces act per unit mass of the body. Both these forces result in the generation of stresses.
Before deriving these conservation laws of momentum rigorously, we obtain the same using using an approximate analysis, as we did for the transformation of curves, areas and volumes. Moreover, we obtain these for a 2D body. Consider an 2D infinitesimal element in the current configuration with dimensions ∆x along the x direction and ∆y along the y direction, as shown in figure 5.1. We assume that the center of the infinitesimal element, O is located at (x + 0.5∆x, y + 0.5∆y).
We assume that the Cauchy stress, σ varies over the infinitesimal element in the current configuration, σ =  (x, y). That is we have assumed Eulerian description for the stress. Since, we are considering only 2D state of stress, the relevant Cartesian components of the stress are σxx, σyy, σxy and σyx. Expanding the Cartesian components of the stresses using Taylor’s series up to first order we obtain:
(x, y). That is we have assumed Eulerian description for the stress. Since, we are considering only 2D state of stress, the relevant Cartesian components of the stress are σxx, σyy, σxy and σyx. Expanding the Cartesian components of the stresses using Taylor’s series up to first order we obtain: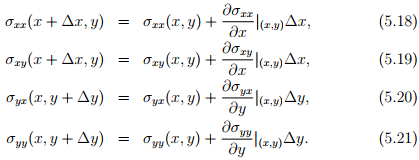
Also seen in figure 5.1 are the Cartesian components of the Cauchy stress acting on various faces of the infinitesimal element, obtained using the equations (5.18) through (5.21).
Now, we are interested in the equilibrium of the infinitesimal element in the deformed configuration under the action of these stresses and the body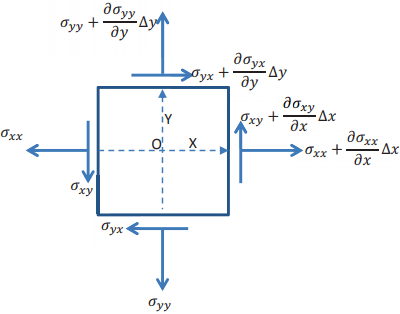
Figure 5.1: 2D Infinitesimal element showing the variation of Cartesian components of the stresses on the various faces.
force, b with Cartesian components bx and by along the x and y direction respectively. Also, we shall assume that the infinitesimal element is accelerating with acceleration, a with Cartesian components ax and ay along the x and y direction respectively. Thus, force equilibrium along the x direction requires: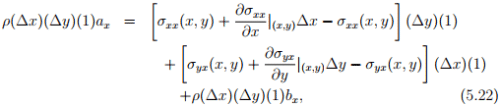
where ρ is the density and the element is assumed to have a unit thickness. Note that here ρ(∆x)(∆y)(1) gives the infinitesimal mass of the element and the stresses are multiplied by the respective areas over which they act to get the forces; since only the forces should satisfy the equilibrium equations. Simplifying, (5.22) we obtain:
Similarly, writing the force equilibrium equation along the y direction: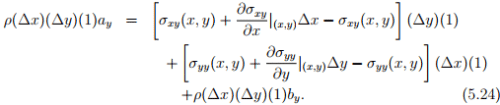
The above equation simplifies to:
Finally, we appeal to the moment equilibrium. Here we assume that there are no body couples or contact couples acting in the infinitesimal element. Since, we can take moment equilibrium about any point, for convenience, we do it about the point O, marked in figure 5.1, to obtain:
Simplifying the above equation we obtain:
which in the limit ∆x and ∆y tending to zero, the limit that we are interested in, reduces to requiring
σxy = σyx. (5.28)
Thus, a plane Cauchy stress field should satisfy the equations (5.23), (5.25) and (5.28) for it to be admissible. Generalizing it for 3D, the Cauchy stress field should satisfy: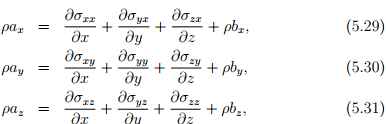
and
σxy = σyx, σxz = σzx, σyz = σzy. (5.32)
The equations (5.29) through (5.31) are written succinctly as
ρa = div(σ) + ρb, (5.33)
The equations (5.29) through (5.31) are written succinctly as ρa = div(σ) + ρb, (5.33) and equations (5.32) tells us that the Cauchy stress should be symmetric. Similarly, requiring a sector of cylindrical shell to be in equilibrium, under the action of spatially varying stresses, it can be shown that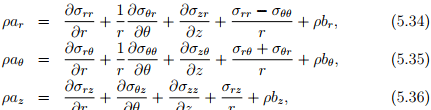
and
σrθ = σθr, σrz = σzr, σθz = σzθ. (5.37)
has to hold.
Conservation of linear momentum
Let At be an arbitrary sub-region in the configuration Bt of a body B. The total linear momentum, Γ(At), of the material particles occupying At is defined by
Next, we find the forces acting on the body. Since, the part At has been isolated from its surroundings, traction t(n)(x), introduced in the last chapter, acts on the boundary of the At . In addition to traction, which arises between parts of the body that are in contact, there exist forces like gravity which act on the material particles not through contact and are called body force. The body forces are denoted by b and are defined per unit mass. Hence, the resultant force, z acting on At is
Now, using Newton’s second law of motion, which states that the rate of change of linear momentum of the body must equal the resultant force that acts on the body in both magnitude and direction we obtain
Using (3.30), definition of acceleration, a and (5.16) the above equation can be written as
Next, using Cauchy’s stress theorem (4.3) and the divergence theorem (2.263) the above equation further can be reduced to
Since, the above equation has to hold for Bt and any subset, At , of it
ρa = div(σ) + ρb. (5.43)
Many a times, we are interested in cases for which a = o, then (5.43) becomes
div(σ) + ρb = o, (5.44)
which is referred to as Cauchy’s equation of equilibrium. Further, there arises scenarios where the body forces can be neglected and in those cases div(σ) = o. Thus, divergence free stress fields are called self equilibrated stress fields.
Equation (5.43) is in spatial form, that is it assumes that 
 are known. But on most occasions, especially in solid mechanics, we know only the material form of these fields that is
are known. But on most occasions, especially in solid mechanics, we know only the material form of these fields that is  and in those occasions it is difficult to obtain the spatial divergence of these fields. To make it easier at these instances, we seek a statement of balance of linear momentum in material form. For this, equation (5.42a) has to be modified. Towards this, we obtain
and in those occasions it is difficult to obtain the spatial divergence of these fields. To make it easier at these instances, we seek a statement of balance of linear momentum in material form. For this, equation (5.42a) has to be modified. Towards this, we obtain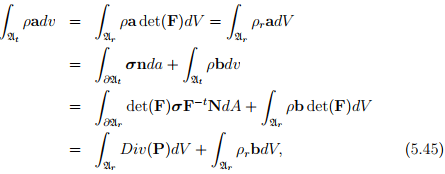
for which we have successively used equation (3.75), (5.14), (3.72) and definition of Piola-Kirchhoff stress (4.42) and the divergence theorem. Since, (5.45) has to hold for any arbitrary subpart of the reference configuration, we obtain the material differential form of the balance of linear momentum as
ρra = Div(P) + ρrb. (5.46)
It is worthwhile to emphasize that irrespective of the choice of the independent variable, the equilibrium of the forces is established only in the current configuration. In other words, whether we use material or spatial description for the stress, the forces and moments have to be equilibrated in the deformed configuration and not the reference configuration.
Conservation of angular momentum
Let At be an arbitrary sub-region in the configuration Bt of a body B. The total angular momentum, Ω(At), of the material particles occupying At is defined by
where xo is the point about which the moment is taken and p is the intrinsic angular momentum per unit volume in the current configuration. Next, we find the moment due to the forces acting on the body. As discussed before there are two kind of forces, surface or contact forces and body forces act on the body which contribute to the moment. Apart from moment arising due to applied forces, there could exist couples distributed per unit surface area, m and body couples c, defined per unit mass. Thus, m =  and c =
and c =  Hence, the resultant moment, ω acting on At is
Hence, the resultant moment, ω acting on At is
However, in non-polar bodies that are the subject matter of the study here, there exist no body couples or couples distributed per unit surface area or intrinsic angular momentum, i.e., c = m = p = o. The balance of angular momentum states that the rate of change of the angular momentum must equal the applied momentum in both direction and magnitude. Hence, (5.49)
(5.49)
Further simplification of this balance principle involves some tensor algebra. First, we begin by calculating the left hand side of the above equation: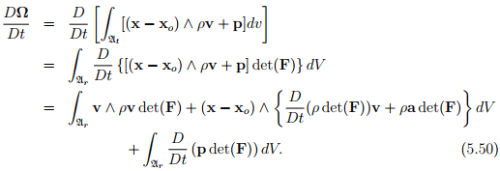
Since, v ∧ v = o and using equations (5.13) and (5.9), (5.50) reduces to
Next, we simplify the right hand side of the equation (5.49). Towards that, we first show that
where τ is the axial vector of (σ − σt ). We begin by establishing a few vector identities which enable us to establish (5.52).
Identity - 1: If u and v are arbitrary vectors then u ∧ v is the axial vector of the skew-symmetric tensor v ⊗ u − u ⊗ v.
Proof: It is straightforward to verify that v ⊗ u − u ⊗ v is skewsymmetric. Then we observe that
(v ⊗ u − u ⊗ v)(u ∧ v) = {u � (u ∧ v)}v − {v � (u ∧ v)}u = o, (5.53)
hence, the axial vector of v⊗u−u⊗v is a scalar multiple of u∧v. Accordingly,
(v ⊗ u − u ⊗ v)a = (a � u)v − (a � v)u = α(u ∧ v) ∧ a, (5.54)
for any vector a. Now, we have to show that α = 1. Setting a = u in the above equation and then forming a scalar product on each side with v we have
(u � u)(v � v) − (u � v)2 = α{(u ∧ v) ∧ u} � v (5.55)
Using (2.36) we find that
α{(u ∧ v) ∧ u} � v = α[(u � u)(v � v) − (u � v)2 ]. (5.56)
Comparing equations (5.55) and (5.56) we find that α = 1. Identity - 2: For any vector a, b, c in the vector space
a ∧ (b ∧ c) = (b ⊗ c − c ⊗ b)a. (5.57)
This identity follows immediately from the above identity.
Identity - 3: Let At be a regular region with boundary ∂At , let n be the outward unit normal to ∂At and let u be a vector field and σ a tensor field, each continuous in At and continuously differentiable in the interior of At . Then
Towards proving this identity, note that
where a is an arbitrary constant vector. To obtain the above we have made use of the identities
and the definition of the gradient. Further, since a is arbitrary in (5.59) we have the identity
Taking the transpose of the above identity, we obtain the required vector identity (5.58).
Now, we are in a position to prove (5.52). For this we replace b by (x−xo) and c by σn in (5.57) and then integrating each side over the surface ∂At we obtain
a being an arbitrary vector. From (5.58) it follows that
Substituting the above equations in (5.63), we obtain

Again using (5.57) and the definition of axial vector to a skew-symmetric tensor (2.98) the above equations can be reduced to a
and hence the required identity (5.52), since a is an arbitrary vector. Substituting (5.51) and (5.52) in (5.49) yields
Since, the body also satisfies the balance of linear momentum (5.43), the first term on the RHS is zero. Hence, the balance of angular momentum requires
Here we are interested only in non-polar bodies and hence, p = c = m = o. Therefore, (5.69) simplifies to requiring
Since, this has to hold for any arbitrary subparts of the body, Bt , τ = o. Consequently,
σ = σt , (5.71)
hat is the Cauchy stress tensor has to be symmetric in non-polar bodies.
|
209 videos|327 docs|212 tests
|
FAQs on Conservation of Momentum - Physics for EmSAT Achieve
| 1. What is conservation of momentum? |  |
| 2. How is momentum calculated? | |
| 3. What is an example of conservation of momentum in real life? | |
| 4. Can momentum be lost? | |
| 5. How does conservation of momentum relate to collisions? | |



ppt
,Extra Questions
,past year papers
,MCQs
,Previous Year Questions with Solutions
,Objective type Questions
,Important questions
,Semester Notes
,Viva Questions
,Conservation of Momentum | Physics for EmSAT Achieve
,Conservation of Momentum | Physics for EmSAT Achieve
,mock tests for examination
,study material
,Exam
,Sample Paper
,practice quizzes
,Conservation of Momentum | Physics for EmSAT Achieve
,shortcuts and tricks
,video lectures
,Summary
,Free
;


Conservation of Momentum Free PDF Download
Importance of Conservation of Momentum
Conservation of Momentum Notes
Conservation of Momentum EmSAT Achieve Questions
Study Conservation of Momentum on the App
|
© EduRev
|
Education Revolution
|



|






within 7 days!