Design of Eccentrically Loaded Bolted/Riveted Joints | Design of Machine Elements - Mechanical Engineering PDF Download

1. Eccentrically loaded screwed joint:
Consider a bracket fixed to the wall by means of three rows of screws having two in each row as shown in figure 11.1.1. An eccentric load F is applied to the extreme end of the bracket. The horizontal component, Fh, causes direct tension in the screws but the vertical component, Fv, is responsible for turning the bracket about the lowermost point in left (say point O), which in an indirect way introduces tension in the screws.
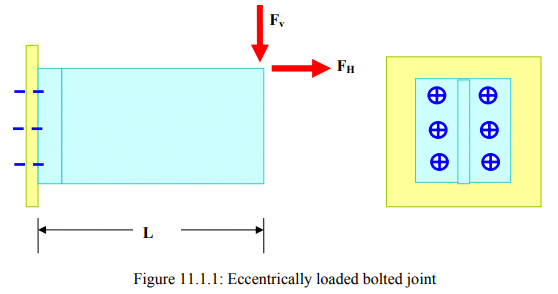
It is easy to note that the tension in the screws cannot be obtained by equations of statics alone. Hence, additional equations must be formed to solve for the unknowns for this statically indeterminate problem. Since there is a tendency for the bracket to rotate about point O then, assuming the bracket to be rigid, the following equations are easily obtained.

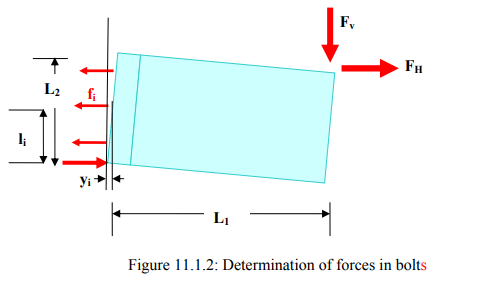
where yi =elongation of the i-th bolt
li=distance of the axis of the i-th bolt from point O.
If the bolts are made of same material and have same dimension, then
fi = kyi
where fi =force in the i-th bolt
k =stiffness of the bolts
Thus 
Using the moment balance equations about O, the lowermost point in the left side, the following equation is obtained.
 in a row.
in a row.
Thus the force in the i-th screw is

For safe design of the joint it is therefore required that
where St =allowable tensile stress of the bolt.
Note that Fvcauses also direct shear in the bolt. Its effect may be ignored for a preliminary design calculation.
2. Eccentrically loaded riveted joint:
Consider, now, a bracket, which carries a vertical load F . The bracket, in this case, is connected to the wall by four rivets as shown in figure 11.1.2. The force,
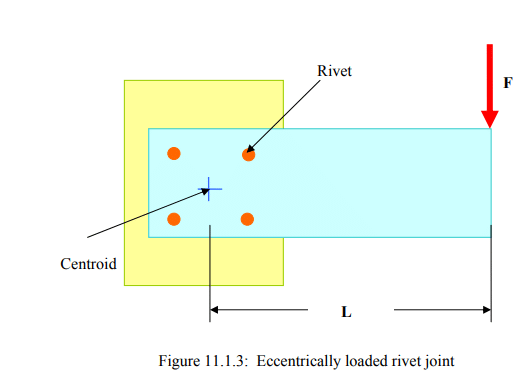
in addition to inducing direct shear of magnitude F/4 in each rivet, causes the whole assembly to rotate. Hence additional shear forces appear in the rivets. F Centroid Rivet L Figure 11.1.3: Eccentrically loaded rivet joint
Once again, the problem is a statically indeterminate one and additional assumptions are required. These are as following:
(i) magnitude of additional shear force is proportional to the distance between the rivet center and the centroid of the rivet assembly, whose coordinates are defined as
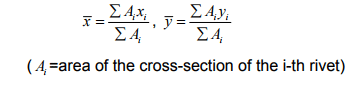
(ii) directions of the force is perpendicular to the line joining centroid of the rivet group and the rivet center and the sense is governed by the rotation of the bracket.
Noting that for identical rivets the centroid is the geometric center of the rectangle, the force in the i-th rivet is

where α =proportional constant
li=distance of the i-th rivet from centroid.
Taking moment about the centroid
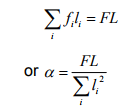
Thus, the additional force is 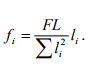
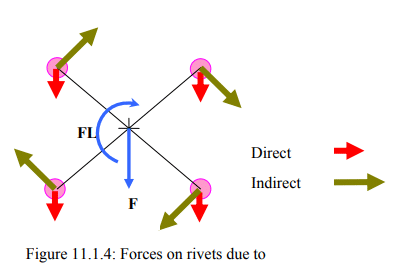
The net force in the i-th rivet is obtained by parallelogram law of vector addition as
where θ i =angle between the lines of action of the forces shown in the figure.
For safe designing we must have
where ss =allowable shear stress of the rivet.
|
49 videos|107 docs|77 tests
|
FAQs on Design of Eccentrically Loaded Bolted/Riveted Joints - Design of Machine Elements - Mechanical Engineering
| 1. What is an eccentrically loaded bolted/riveted joint? |  |
| 2. How is the design of eccentrically loaded bolted/riveted joints different from centrally loaded joints? | |
| 3. What factors should be considered in the design of eccentrically loaded bolted/riveted joints? | |
| 4. How can the strength of an eccentrically loaded bolted/riveted joint be assessed? | |
| 5. What are some common failure modes in eccentrically loaded bolted/riveted joints? | |




past year papers
,Design of Eccentrically Loaded Bolted/Riveted Joints | Design of Machine Elements - Mechanical Engineering
,Extra Questions
,Semester Notes
,Summary
,Important questions
,Exam
,shortcuts and tricks
,mock tests for examination
,Free
,Design of Eccentrically Loaded Bolted/Riveted Joints | Design of Machine Elements - Mechanical Engineering
,Viva Questions
,Sample Paper
,Design of Eccentrically Loaded Bolted/Riveted Joints | Design of Machine Elements - Mechanical Engineering
,study material
,Previous Year Questions with Solutions
,practice quizzes
,ppt
,video lectures
,Objective type Questions
,MCQs
;






Design of Eccentrically Loaded Bolted/Riveted Joints Free PDF Download
Importance of Design of Eccentrically Loaded Bolted/Riveted Joints
Design of Eccentrically Loaded Bolted/Riveted Joints Notes
Design of Eccentrically Loaded Bolted/Riveted Joints Mechanical Engineering Questions
Study Design of Eccentrically Loaded Bolted/Riveted Joints on the App
|
© EduRev
|
Education Revolution
|



|





