Differential and Difference Equations - Electrical Engineering (EE) PDF Download
Differential and Difference Equations
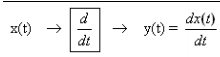
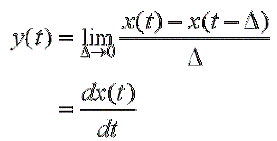
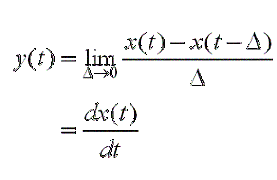
We look at a special class of LSI systems that are frequently encountered in real life applications, namely those that are described by differential and difference equations. We first consider the derivative operator as a system:
The above system is an LSI system.
Proof:
The given system is obviously linear due to the linearity of the derivative operator. Also shift invariance can be easily shown as below:
Let h(t) = t-t0 and g(t) = x(t-t0) = x(h(t)). Let the output of the system to x(t) be y(t). ( y(t) = d x(t) / dt )
Now g'(t) = x'(h(t)).h'(t) = x'(t-t0)
Thus input x(t-t0) gives an output y(t-t0).
Hence the system is LSI.
Note : Also it is now clearly seen that if the input to an LSI system is differentiated, then the output of that system is also differentiated. This property may be proved by taking the limit of the expression: {x(t+h)-x(t)}/h as 'h' tends to zero and using the linearity and shift-invariance of LSI systems.
Properties of the Derivative Operator system:
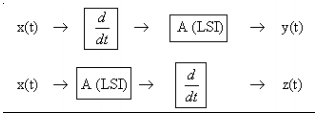
1. Cascade of systems: Suppose we give the output of the derivative operator system as input to another LSI system 'A'. Let y(t) be the output of the combined system for some given input x(t). Now suppose we give x(t) as input to the system 'A' first and then pass its output to the derivative operator system. Let the final output now be z(t). Then from the property that cascading of LSI systems is independent of the order of cascading, we get y(t) = z(t).
2. Memory of the System: The system obviously possesses memory as the derivative operator requires a certain interval length to be defined in.
3. Causality of the System: To answer this we must consider the left, right and center derivates separately. Clearly the left derivative is causal while the center and right derivatives may or may not be so. However for a differentiable function, all the three derivatives being equal, the system is indeed causal.
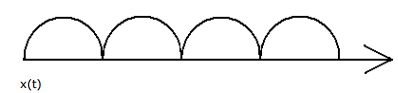
4. Stability of the System: Consider the input signal shown below. Clearly we see that a bounded input does not lead to a bounded output which becomes obvious at points where the derivative of the input signals tends to infinity. Thus the system is not stable.
Exercise: Give an example of a bounded input signal such that its derivative is not bounded as time tends to infinity?
Consider x(t) = sin (t2)..............................(bounded)
Then x'(t) = 2.t.cos(t2)..........................(unbounded)
5. Invertibility of the System:
Is the derivative operator invertible? No, because when we consider the class of constants as input then the output is always zero. Thus the derivative operator is not one is to one. However the system is invertible upto an additive constant.
Linear Constant Coefficient Differential and Difference Equations
Equations of the form shown below are called linear constant coefficient differential equations:
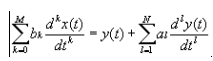
The above description is in the implicit form. Hence it does not yield a unique interpretation. But we can make the system LSI by adding the following conditions:
1. Interpret the equation as holding for all time.
2. If we are concerned with only limited interval of time, then impose zero initial conditions.
In order to solve a differential equation we must specify one or more auxilary conditions. Auxilary conditions are required to characterize the system completely. Differnent choices for the auxilary conditions can lead to different relationships between the input and output. We want the sytem to be LSI and hence we specify initial rest conditions.
We Specify the initial rest conditions as follows:
For t<=t0 if x(t) =0 then we assume that y(t)=0 and therefore the response for t>t0 can be calculated from the differential equation with initial conditions

Note: It should be noted that in the initial rest conditions,t0 is not a fixed point in time but rather depends on the input x(t). We now prove that for the initial rest conditions the system is indeed LSI:
We first prove linearity. Suppose x1(t) and x2(t) are two arbitrary signals such that x1(t)=0 for t<t1, x2(t)=0 for t<t2. Let y<sub>1</sub>(t) and y2(t) be the system output for x1(t) and x2(t) respectively. Then we have to prove the system output for the input x3(t)=a.x1(t)+b.x2(t) is y3(t)=a.y1(t)+b.y2(t).
Without loss of generality we can assume that t1<t2. Using the initial rest conditions we see that for y3(t), t0=t1 . Due to the linearity of the derivative operator a.y1(t)+b.y2(t) satisfies the differential equation. Also a.y1(t)+b.y2(t) satisfies the initial conditions with t0=t1. But by Uniquesess Theorem for differential equations, it should have a unique solution. Hence we have y3(t)=a.y1(t)+b.y2(t). Thus we have established the linearity.
Now we prove shift invariance.
Suppose x1(t) is an arbitrary signal sich that x1(t)=0 for t<t0. Let x2(t)=x1(t-T) and let y1(t) and y2(t) be the system outputs for x1(t) and x2(t) respectively. Then we have to show that y2(t)=y1(t-T).
We procees as we had done previously. y1(t-T) satisfies the differential equation because of the shift invariance of the derivative operator. y2(t) satisfies the initial conditions with t0 as t0+T and y1(t) satisfies the initial conditions with t0 as t0. Form this it is easy to see that y1(t-T) satisfies the initial conditions with t0 as t0+T. Finally by invoking the uniqueness theorem we can conclude that y2(t)=y1(t-T) which is what we sought to prove.
Also note that the above system is causal. This is clear from the following argument: Consider two inputs p(t) and q(t) such that for t<T, p(t)=q(t). Let r(t) and s(t) be their respective outputs. Now let x(t)=p(t)-q(t). Thus x(t)=0 for t<T. From the initial conditions we get output of x(t) as y(t)=0 for t<T. But from linearity property we have y(t)=r(t)-s(t)=0 for t<T. Thus r(t) = s(t) for t<T and the system is causal.
Example: Consider the following RC system. If voltage across C is 2V initially, show that the system is not LSI.
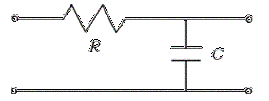
ake the following RC System:
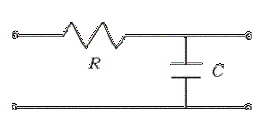
If the capacitor has 2V initially across its terminals, then the above system is not initially at rest.
Let x0 and x0 be two inputs to the system as shown below. Now if the system was linear, then the output voltage across the capacitor at time t=0 would have been 2V + 2V = 4V but the initial voltage across the capacitor will still be only 2V.
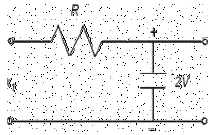
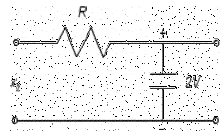
Hence the system is not LTI.
For discrete variables, the corresponding equation is called the linear constant coefficient difference equation. Instead of derivatives we have delays as shown below.
The above system is causal too.
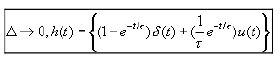
Impulse response of a differentiator:
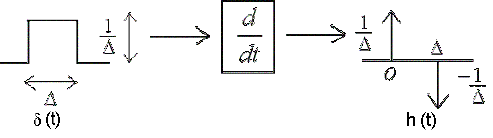
If you convolve x(t) with h(t) then you get the following:
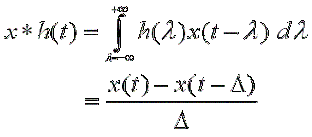
Thus we see that though we cannot interpret the object h(t), its behavior under a convolution with x(t) leading to derivative can be understood.
In the above analysis we have come across certain mathematical tools of interest know as singularity functions.
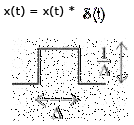
While a function is usually defined at every value of the independent variable, the priomary importance of the unit impulse is not what it is at each value of t, but rather what it does under convolution. So from the point of view of the linear system analysis we alternatively define the unit impulse as a signal for which
x(t) = x(t) *δ(t) , for any x(t)
All the properties of the unit impulse that we need can be obtained from the operational definition of the unit impulse.
Note:
The above definition of unit impulse follows from the fact that the impuse response of identity system is unit impulse itself and the output of any input x(t) is the convolution of x(t) and unit impulse. But the output of identity system is the input x(t) itself and hence
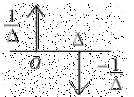
Singularity functions are functions which can be defines operationally in terms of their behavior under convolution. Consider the derivative system. The impulse response of this system is the derivative of unit impulse and it is called unit doublet. It is denoted by u1(t). Its working definition is
dx(t)/dt=x(t)*u1(t), for any signal x(t).
Similarly we define u2(t), the second derivative of unit impulse response as
d2x(t)/dt2=x(t)*u2(t)
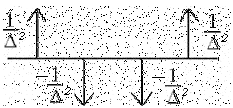
t is easy to see that u2(t)=u1(t) * u1(t).
In general uk(t), k N is defined as uk(t)=u1(t)*.........*u1(t), k times
Using the above notation we denote by u0(t).
We denote the running integral of by u-1(t), which is the unit step function. Similarly: u-2(t)=running integral of u-1(t)=t . u(t) in general
u-n(t) = tn-1/(n-1)! . u(t)
all u-n are well defined for n ∈N
Comparison between Continuous and Discrete Systems
Let us first understand what is meant by integer derivative and integer delay.
1. Integer Derivative: Given x(t) we find dx(t)/dt.
2. Integer Delay: Given x[t] we find x[t-N], where N is an integer.

Note: Realizability implies giving a physical structure to the solution with known elements. We shall see later why integer delay is not exactly realizable in a continuous system.
FAQs on Differential and Difference Equations - Electrical Engineering (EE)
| 1. What is a differential equation? |  |
| 2. What is the difference between a differential equation and a difference equation? | |
| 3. How are differential equations and difference equations used in real-life applications? | |
| 4. What are the different methods for solving differential equations? | |
| 5. Can difference equations be solved in a similar way to differential equations? | |

|
4.90/5 Rating |

|
Dec 19, 2024 Last updated |

|
Explore Courses for Electrical Engineering (EE) exam
|
|
Previous Year Questions with Solutions
,Important questions
,video lectures
,Differential and Difference Equations - Electrical Engineering (EE)
,shortcuts and tricks
,Viva Questions
,practice quizzes
,past year papers
,Differential and Difference Equations - Electrical Engineering (EE)
,Extra Questions
,study material
,Summary
,Semester Notes
,Objective type Questions
,Differential and Difference Equations - Electrical Engineering (EE)
,Sample Paper
,MCQs
,Free
,Exam
,mock tests for examination
,ppt
;






Differential and Difference Equations Free PDF Download
Importance of Differential and Difference Equations
Differential and Difference Equations Notes
Differential and Difference Equations Electrical Engineering (EE) Questions
Study Differential and Difference Equations on the App
|
© EduRev
|
Education Revolution
|



Follow Us
|




