Exercise Questions - Introduction to Digital Signal Processing | Digital Signal Processing - Electronics and Communication Engineering (ECE) PDF Download

Exercise Questions
Q. y(n)-0.4 y(n-1) = x(n). find the anti-causal impulse response? h(n)=0 for n≥ 0
h(n-1) = 2.5 [h(n)- δ (n) ]
h(-1) = 2.5 [h(0)- δ (0) ] = -2.5
h(-2) = -2.52 . …….. h(n) = -2.5n valid for n ≤ -1
Q. x(n)={1,2,3} y(n)={3,4} Obtain difference equation from i/p & o/p information
y(n) + 2 y(n-1) + 3 y(n-2) = 3 x(n) + 4 x(n-1) (Ans)
Q. x(n) = {4,4,}, y(n)= x(n)- 0.5x(n-1). Find the difference equation of the inverse system. Sketch the realization of each system and find the output of each system.
Solution:
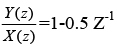
The original system is y(n)=x(n)-0.5 x(n-1)
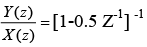
The inverse system is x(n)= y(n)-0.5 y(n-1)
y (n) = x (n) – 0.5 x(n-1)
Y (z) = X (z) [1-0.5Z-1]
System
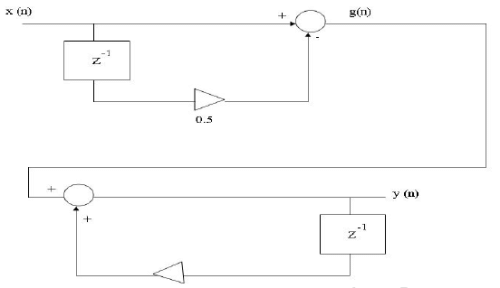
Inverse System
y (n) – 0.5 y(n-1) =x(n)
Y (z) [1-0.5 Z-1] = X (z)
g (n) = 4 δ (n) - 2δ(n-1) + 4δ (n-1) - 2δ (n-2) = 4δ (n) + 2δ (n-1) - 2δ (n-2)
y (n) = 0.5 y(n-1) + 4δ (n) + 2δ (n-1) – 2δ (n-2)
y (0) = 0.5y(-1) + 4δ (0) = 4
y(1) = 4
y(2) = 0.5 y(1) - 2δ (0) = 0
y(n) = {4, 4} same as i/p
| Non Recursive filters | Recursive filters |
y(n) for causal system
For causal i/p sequence |
Present response is a function of the present and past N values of the excitation as well as the past N values of response. It gives IIR o/p but not |
y(n) = Present response depends only on present i/p & previous i/ps but not future i/ps. It gives FIR o/p | always. (n) – y(n-1) = x(n) – x(n-3) |


 ak x(n-k)
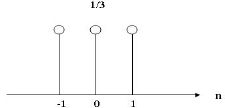
ak x(n-k)Q. y(n) = 1/3[x (n+1) + x (n) + x (n-1)] Find the given system is stable or not?
Let x(n) = δ (n)
h(n) = 1/3 [ δ (n+1) + δ (n) + δ(n-1)]
h(0) = 1/3
h(-1) = 1/3
h(1) = 1/3
s=∑h(n) <∞ therefore Stable.
Q. y(n) = a y(n-1) + x(n) given y(-1) = 0
Let x(n) = δ (n)
h(n) = y(n) = a y(n-1) + δ (n)
h(0) = a y(-1) +δ (0) = 1 = y(0)
h(1) = a y(0) + δ (1) = a
h(2) = a y(1) + δ (2) = a2 . . . . . . . h(n) = an u(n) stable if a<1.
y(n-1) =1/a [ y(n) – x(n)]
y(n) = 1/a [ y(n+1) – x(n+1)]
y(-1) = 1/a [ y(0) – x(0)]=0
y(-2) = 0
Q. y(n) = 1/n+1 y(n-1) + x(n) for n ≥ 0
= 0 otherwise. Find whether given system is time variant or not?
Let x(n) = δ (n)
h (0) = 1 y(-1) +δ (0) = 1
h(1) = ½ y(0) + δ(1) = ½
h(2) = 1/6
h(3) = 1/24
if x(n) = δ (n-1)
y(n) = h(n-1)
h(n-1) = y(n) =1/n+1 h(n-2) + δ (n-1)
n=0 h(-1) = y(0) = 1 x 0+0 =0
n=1 h(0) = y(1) = ½ x 0 +δ (0)= 1
n=2 h(1) = y(2) = 1/3 x 1 + 0 = 1/3
h(2) = 1/12
∴ h (n, 0) ≠ h (n,1) ∴ TV
Q. y (n) = 2n x(n) Time varying
Q. y (n) =1/3 [x (n+1) + x (n) + x (n-1)] Linear
Q. y (n) = 12 x (n-1) + 11 x(n-2) TIV
Q. y (n) = 7 x2(n-1) non linear
Q. y (n) = x2(n) non linear
Q. y (n) = n2 x (n+2) linear
Q. y (n) = x (n2) linear
Q. y (n) = ex(n) non linear
Q. y (n) = 2x(n) x (n) non linear, TIV
(If the roots of characteristics equation are a magnitude less than unity. It is a necessary & sufficient condition) Non recursive system, or FIR filter are always stable
Q. y (n) + 2 y2(n) = 2 x(n) – x(n-1) non linear, TIV
Q. y (n) - 2 y (n-1) = 2x(n) x (n) non linear, TIV
Q. y (n) + 4 y (n) y (2n) = x (n) non linear, TIV
Q. y (n+1) – y (n) = x (n+1) is causal
Q. y (n) - 2 y (n-2) = x (n) causal
Q. y (n) - 2 y (n-2) = x (n+1) non causal
Q. y (n+1) – y (n) = x (n+2) non causal
Q. y (n-2) = 3 x (n-2) is static or Instantaneous.
Q. y (n) = 3 x (n-2) dynamic
Q. y (n+4) + y (n+3) = x (n+2) causal & dynamic
Q. y (n) = 2 x (αη )
If α=1 causal, static
α <1 causal, dynamic
α >1 non causal, dynamic
α≠ 1 TV
Q. y (n) = 2(n+1) x (n) is causal & static but TV.
Q. y (n) = x (-n) TV
|
3 videos|75 docs|54 tests
|
FAQs on Exercise Questions - Introduction to Digital Signal Processing - Digital Signal Processing - Electronics and Communication Engineering (ECE)
| 1. What is digital signal processing in electrical engineering? |  |
| 2. How is digital signal processing different from analog signal processing? | |
| 3. What are some applications of digital signal processing in electrical engineering? | |
| 4. What are the key components of a digital signal processing system? | |
| 5. What skills are essential for a career in digital signal processing in electrical engineering? | |


ppt
,Important questions
,Previous Year Questions with Solutions
,Free
,video lectures
,study material
,shortcuts and tricks
,Semester Notes
,Summary
,Objective type Questions
,Extra Questions
,MCQs
,Sample Paper
,Exercise Questions - Introduction to Digital Signal Processing | Digital Signal Processing - Electronics and Communication Engineering (ECE)
,Viva Questions
,Exam
,Exercise Questions - Introduction to Digital Signal Processing | Digital Signal Processing - Electronics and Communication Engineering (ECE)
,Exercise Questions - Introduction to Digital Signal Processing | Digital Signal Processing - Electronics and Communication Engineering (ECE)
,past year papers
,practice quizzes
,mock tests for examination
;


Exercise Questions - Introduction to Digital Signal Processing Free PDF Download
Importance of Exercise Questions - Introduction to Digital Signal Processing
Exercise Questions - Introduction to Digital Signal Processing Notes
Exercise Questions - Introduction to Digital Signal Processing Electronics and Communication Engineering (ECE)
Study Exercise Questions - Introduction to Digital Signal Processing on the App
|
© EduRev
|
Education Revolution
|



|






within 7 days!