Feed Forward Control - Electrical Engineering (EE) PDF Download
Feedforward control
A feedback controller responds only after it detects a deviation in the value of the controlled output from its desired set point. On the other hand, a feedforward controller detects the disturbance directly and takes an appropriate control action in order to eliminate its effect on the process output.
Consider the distillation column shown in Fig (V.1) The control objective is to keep the distillate concentration at a desired set point despite any changes in the inlet feed stream.

Fig V.1: Feedback and Feedforward control configuration of a distillation column
Fig.V.1(a) shows the conventional feedback loop, which measures the distillate concentration and after comparing it with the desired setpoint, increases or decreases the reflux ratio. A feedforward control system uses a different approach. It measures the changes in the inlet feed stream (disturbance) and adjusts the reflux ratio appropriately. Fig V.1(b) shows the feedforward control configuration.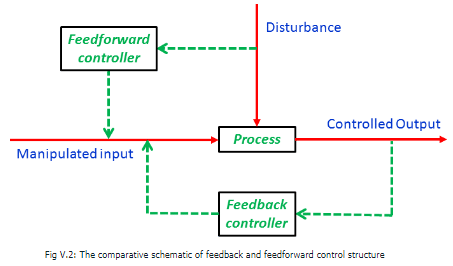
Fig V.2 shows the general form of a feedforward control system. It directly measures the disturbance to the process and anticipates its effect on the process output. Eventually it alters the manipulated input in such a way that the impact of the disturbance on the process output gets eliminated. In other words, where the feedback control action starts after the disturbance is “felt” through the changes in process output, the feedforward control action starts immediately after the disturbance is “measured” directly. Hence, feedback controller acts in a compensatory manner whereas the feedforward controller acts in an anticipatory manner.
V.I.I Design of feedforward controller
Let us consider the block diagram of a process shown in Fig V.3. The Fig V.3(a) presents the open-loop diagram of the process. The process and disturbance transfer functions are represented by Gp and Gd respectively. The controlled output, manipulated input and the disturbance variable are indicated as  and
and  respectively.
respectively.


(c) Process diagram with feedforward controller, sensor and valve
Fig V.3: The schematic of a feedforward controller mechanism
The process output is represented by V.1
V.1
The control objective is to maintain  at the desired setpoint
at the desired setpoint  . Hence the eq (V.1) can be rewritten as
. Hence the eq (V.1) can be rewritten as V.2
V.2
The eq. (V.2) can be rearranged in the following manner: V. 3
V. 3
The eq. V. (3) can be schematically represented by Fig 3(b).
For the sake of simplicity, measuring element and final control element were not considered as parts of the feedforward control configuration as shown in Fig V.3(b). In a more generalized case, when such elements are added in the controller configuration, the resulting control structure takes the form of Fig V.3(c). A generalized form of controller equation can be written as
and  (V 5)
(V 5)
In case of regulatory problem (disturbance rejection) i.e. when  , the controller should be able to reject the effect of disturbance and ensure no deviation in the output, i.e.
, the controller should be able to reject the effect of disturbance and ensure no deviation in the output, i.e.  . In other words,
. In other words, (V6)
(V6)
or
 (V7)
(V7)
In case of servo problem (setpoint tracking), i.e. when  , the controller should be able to ensure that output tracks the setpoint, i.e.
, the controller should be able to ensure that output tracks the setpoint, i.e.  . In other words,
. In other words,
GpGcGfGSP =1 (V 8)
or
 (V9)
(V9)
Example of design of feedforward controller
Consider an overflow type continuous stirred tank heater shown in Fig V.4. The fluid inside the tank is heated with steam whose flow rate is Fst and supplying heat at a rate of Q to the fluid. Temperatures of the inlet and outlet streams are Ti and T respectively. V is the volume of liquid which is practically constant in an overflow type reactor. A control valve in the steam line indicates that the steam flow rate can be manipulated in order to keep the liquid temperature at a desired setpoint. Temperature of the inlet stream flow is the source of disturbance (change in Ti ) to the process.

Fig V.4: Feedforward control configuration of an overflow type continuous stirred tank heater
A simple energy balance exercise will yield the model equation of the above process as:
 V.10
V.10
All the variables are assumed to be in the deviation form. Hence, taking Laplace transform on both sides we obtain: V.11
V.11
 V.12
V.12
 V.13
V.13
 V.14
V.14
The feedforward controller is meant for ensuring  . Hence,
. Hence,
 V.15
V.15
 V.16
V.16
Hence, one needs to set Fst in such a way that Q amount of heat as given in eq.(V.16) is transferred to the process. Fig V.4(b) represents the feedforward structure of the controller.
Remarks:
• The feedforward controller ideally does not get any feedback from the process output. Hence, it solely works on the merit of the model(s). The better a model represents the behavior of a process,the better would be the performance of a feedforward controller designed on the basis of that model. Perfect control necessitates perfect knowledge of process and disturbance models and this is practically impossible. This inturn is the main drawback of a feedforward controller.
• The feedforward control configuration can be developed for more than one disturbance in multi-controller configuration. Any controller in that configuration would act according to the disturbance for which it is designed.
• External characteristics of a feedforward loop are same as that of a feedback loop. The primary measurement (disturbance in case of feedforward control and process output in case of feedback control) is compared to a setpoint and the result of the comparison is used as the actuating signal for the controller. Except the controller, all other hardware elements of the feedforward control configuration such as sensor, transducer, transmitter, valves are same as that of an equivalent feedback control configuration.
• Feedforward controller cannot be expressed in the feedback form such as P, PI and PID controllers. It is regarded as a special purpose computing machine .
• Let us consider a system where process delay is higher than disturbance delay, eg.  and
and  ; in such case,
; in such case,  . That means one needs to know the future values of disturbance in order to decide present control action. This is physically unrealizable controller.
. That means one needs to know the future values of disturbance in order to decide present control action. This is physically unrealizable controller.
V.I.3 Combination of Feedforward-Feedback Controller
The following table provides a comparative assessment of feedforward and feedback controllers.
| Table V.1: Merits and demerits of feedforward and feedback controllers | |
| Merits | Demerits |
| Feedforward controllers | |
| Takes corrective action before the process “feels” the disturbance | Requires measurement of all disturbances affecting the system |
| Good for sluggish systems and/or system with large deadtime | Sensitive to variation in process parameters |
| Does not affect the stability of the process | Requires a “near perfect” model of the process |
| Feedback controllers | |
| Does not require disturbance measurement | Acts to take corrective action after the process “feels” the disturbance |
| Insensitive to mild errors in modeling | Bad for sluggish systems and/or system with large deadtime |
| Insensitive to mild changes in process parameters | May affect the stability of the process |
Let us now explore how a combination of feedforward and feedback controller would perform when they are designed to act simultaneously. The schematic of a feedforward-feedback controller is shown in Fig V.5.

Without losing the generality we shall ignore the transfer functions of the measuring element and the final control element.
Now the closed loop transfer function of feedforward-feedback controller can be derived in the following manner:
 V.17
V.17
Rearranging the above we get,
 V.18
V.18
It is observed that the stability of the closed loop response is determined by the roots of the characteristic equation:  . Hence, the stability characteristics of a process does not change with the addition of a feedforward loop.
. Hence, the stability characteristics of a process does not change with the addition of a feedforward loop.
The following numerical example demonstrates the efficacy of a feedforward-feedback controller. Consider a process having process and disturbance transfer functions as
 V.19
V.19
A feedback PID controller,with  , is used to control the process for disturbance rejection purpose. A feedforward controller has also been designed for the process however it has been assumed that the time constant of the process has been measured erroneously as 2.1 instead of 2. A first order filter with time constant 0.1 has been augmented to the transfer function of Gsp in order to make it causal.
, is used to control the process for disturbance rejection purpose. A feedforward controller has also been designed for the process however it has been assumed that the time constant of the process has been measured erroneously as 2.1 instead of 2. A first order filter with time constant 0.1 has been augmented to the transfer function of Gsp in order to make it causal.
A Simulink code (Fig V.6) has been generated to simulate the process under the three types of controllers as said above. 
The performance of three controllers, viz., feedforward, feedback and feedforward-feedback, are presented in Fig V.7

It is clearly observed that the performance of feedforward-feedback controller is far better than the other two individual controllers.
FAQs on Feed Forward Control - Electrical Engineering (EE)
| 1. What is feed forward control? |  |
| 2. How does feed forward control work? | |
| 3. What are the advantages of feed forward control? | |
| 4. What are some applications of feed forward control? | |
| 5. Are there any limitations or challenges with feed forward control? | |

|
4.60/5 Rating |

|
Nov 23, 2024 Last updated |

|
Explore Courses for Electrical Engineering (EE) exam
|
|
video lectures
,Sample Paper
,Feed Forward Control - Electrical Engineering (EE)
,shortcuts and tricks
,Feed Forward Control - Electrical Engineering (EE)
,Extra Questions
,Summary
,Previous Year Questions with Solutions
,past year papers
,study material
,Feed Forward Control - Electrical Engineering (EE)
,practice quizzes
,MCQs
,ppt
,Exam
,Free
,mock tests for examination
,Semester Notes
,Objective type Questions
,Viva Questions
,Important questions
;






Feed Forward Control Free PDF Download
Importance of Feed Forward Control
Feed Forward Control Notes
Feed Forward Control Electrical Engineering (EE) Questions
Study Feed Forward Control on the App
|
© EduRev
|
Education Revolution
|



Follow Us
|