General Solution To Second Order Homogeneous LTI System | Theory of Machines (TOM) - Mechanical Engineering PDF Download

General Solution to Second-Order Homogeneous LTI System
We now focus on the zero input response of the second-order LTI system of Eq. (1–17), i.e., we focus on the system

Suppose that we guess the solution to Eq. (1–26) as
xh(t) = eλt (1–27)
where λ is constant that has yet to be determined. Differentiating the assumed solution of Eq. (1–27) twice, we have
Substituting the results of Eqs. (1–28) and (1–29) into (1–26), we obtain
Then, because eλt is not zero as a function of time, it can be dropped from Eq. (1–30) to give

Equation (1–31) is called the characteristic equation whose roots give the behavior of the zero input response of Eq. (1–17). Using the quadratic formula, the roots of Eq. (1–31) are given as

It can be seen that the types of roots admitted by Eq. (1–31) depend upon the value of ζ. In particular, the types of roots are governed by the quantity ζ2 − 1. We have three cases to consider: (1) 0 ≤ ζ < 1, (2) ζ = 1, and (3) ζ > 1. We now consider each of these cases in turn.
Case 1: 0 ≤ ζ < 1 (Underdamping)
When 0 ≤ ζ < 1 the zero input response is said to be underdamped. For an underdamped system the quantity ζ2 − 1 < 0 which implies that  The roots of the characteristic equation for an underdamped system are then given as
The roots of the characteristic equation for an underdamped system are then given as

It is seen from Eq. (1–33) that the roots of the characteristic equation for an underdamped system are complex. Furthermore, the general zero input response for an underdamped system is given as

Eq. (1–34) can be written as
xh(t) = e −ζωnt (c1 cos ωdt + c2 sinωdt) (1–35)
where the quantity ωd = ωn  is called the damped natural frequency of the system. The constants c1 and c2 can be solved for by using the initial conditions
is called the damped natural frequency of the system. The constants c1 and c2 can be solved for by using the initial conditions  as follows. First, substituting the initial condition x(0) = x0 into Eq. (1–35), we obtain c1 as
as follows. First, substituting the initial condition x(0) = x0 into Eq. (1–35), we obtain c1 as
xh(0) = x0 = c1 (1–36)
Next, differentiating xh(t) in Eq. (1–35), we obtain

Applying the initial condition  we obtain
we obtain
 (1–38)
(1–38)
Substituting the result for c1 from Eq. (1–36) into Eq. (1–38), we obtain
 (1–39)
(1–39)
Solving for c2 we have

The zero input response for an underdamped system is then given as
A schematic of the underdamped zero input response for various values of 0 ≤ ζ < is shown in Fig. 1–2.
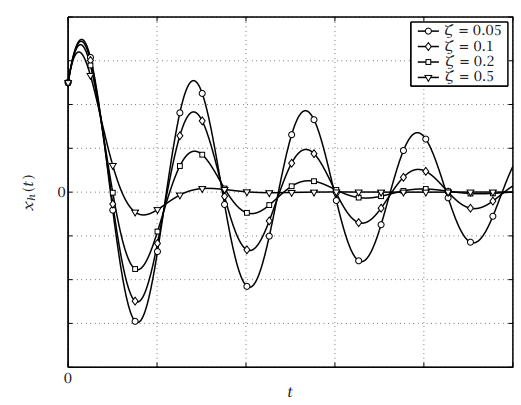
Figure 1–2 Schematic of the zero input response of an underdamped second-order linear time-invariant system.
Case 2: ζ = 1 (Critical Damping)
When ζ = 1 the zero input response is said to be critically damped. For critically damped system the quantity ζ2 − 1 = 0 which implies that  = 0. The roots of the characteristic equation for an underdamped system are then given as
= 0. The roots of the characteristic equation for an underdamped system are then given as
λ1,2 = −ζωn = −ωn (1–42)
It is seen from Eq. (1–42) that the roots of the characteristic equation for a critically damped system are real and repeated (i.e., the two roots are the same). Furthermore, the general zero input response for a critically damped system is given as
xh(t) = e −ωnt (c1 + c2t) (1–43)
The constants c1 and c2 can be solved for by using the initial conditions  as follows. First, applying the initial condition x(0) = x0 into Eq. (1–43), we have
as follows. First, applying the initial condition x(0) = x0 into Eq. (1–43), we have
xh(0) = x0 = c1 (1–44)
Next, differentiating Eq. (1–43), we obtain (1–45)
(1–45)
Applying the initial condition  we obtain
we obtain
 (1–46)
(1–46)
Substituting the result for c1 from Eq. (1–44), we have (1–47)
(1–47)
Solving Eq. (1–47) for c2 gives
 (1–48)
(1–48)
The zero input response for an critically damped system is then given as
 (1–49)
(1–49)
A schematic of a critically damped zero input response is shown in Fig. 1–3.
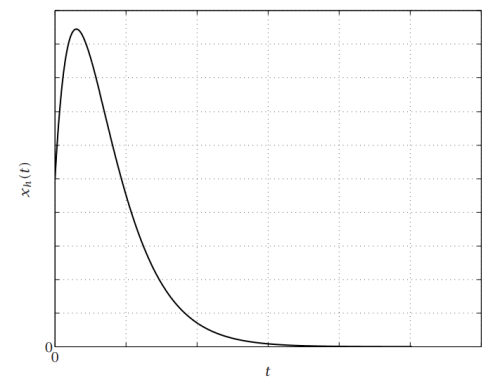
Figure 1–3 Schematic of the zero input response of a critically damped second-order linear time-invariant system.
Case 3: ζ > 1 (Overdamping)
When ζ > 1 the zero input response is said to be overdamped. For an overdamped system the quantity ζ2 −1 > 0 which implies that  The roots of the characteristic equation for an underdamped system are then given as
The roots of the characteristic equation for an underdamped system are then given as

It is seen from Eq. (1–50) that the roots of an overdamped system are real and distinct. Furthermore, the general zero input response for an overdamped system is given as
xh(t) = c1eλ1t + c2eλ2t (1–51)
The constants c1 and c2 can be solved for by using the initial conditions  as follows. First, applying the initial condition x(0) = x0, we obtain
as follows. First, applying the initial condition x(0) = x0, we obtain
xh(0) = x0 = c1 + c2 (1–52)
Next, differentiating Eq. (1–51) gives
 (1–53)
(1–53)
Then, applying the initial condition x( ˙ 0) = x˙0, we obtain
 (1–54)
(1–54)
Equations (1–52) and (1–54) can then be solved simultaneously for c1 and c2 to give

The general zero input response for an overdamped system is then given as
A schematic of an overdamped zero input response for various values of ζ > 1 is shown in Fig. 1–4.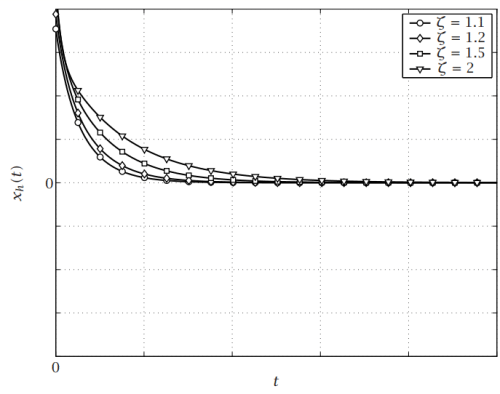
Figure 1–4 Schematic of the zero input response of an overdamped second-order linear time-invariant system.
|
87 videos|43 docs|29 tests
|
FAQs on General Solution To Second Order Homogeneous LTI System - Theory of Machines (TOM) - Mechanical Engineering
| 1. What is a second order homogeneous LTI system? |  |
| 2. How do you find the general solution to a second order homogeneous LTI system? | |
| 3. What is a characteristic equation of a second order homogeneous LTI system? | |
| 4. Can a second order homogeneous LTI system have complex roots in its characteristic equation? | |
| 5. Is the general solution to a second order homogeneous LTI system unique? | |


Summary
,Important questions
,shortcuts and tricks
,Extra Questions
,Objective type Questions
,Viva Questions
,MCQs
,video lectures
,Free
,Semester Notes
,General Solution To Second Order Homogeneous LTI System | Theory of Machines (TOM) - Mechanical Engineering
,Previous Year Questions with Solutions
,ppt
,practice quizzes
,mock tests for examination
,Exam
,General Solution To Second Order Homogeneous LTI System | Theory of Machines (TOM) - Mechanical Engineering
,Sample Paper
,past year papers
,study material
,General Solution To Second Order Homogeneous LTI System | Theory of Machines (TOM) - Mechanical Engineering
;






General Solution To Second Order Homogeneous LTI System Free PDF Download
Importance of General Solution To Second Order Homogeneous LTI System
General Solution To Second Order Homogeneous LTI System Notes
General Solution To Second Order Homogeneous LTI System Mechanical Engineering Questions
Study General Solution To Second Order Homogeneous LTI System on the App
|
© EduRev
|
Education Revolution
|



|




