Introduction: Equilibrium of a Particle | Engineering Mechanics - Civil Engineering (CE) PDF Download
| Table of contents |
|
| Equilibrium of Particle and Body |
|
| Conditions for Equilibrium in 2D |
|
| Free Body Diagram in 2D |
|
| Free Body Diagram in 3D |
|
| Equilibrium in 3D |
|
Equilibrium of Particle and Body
Equilibrium of a Particle When the resultant of all forces acting on a particle is zero, the particle is said to be in equilibrium.
A particle which is acted upon two forces.
Newton’s First Law: If the resultant force on a particle is zero, the particle will remain at rest or will continue at constant speed in a straight line.
EQUILIBRIUM A particle is in equilibrium if it is at rest if originally at rest or has a constant velocity if originally in motion. The term equilibrium or static equilibrium is used to describe an object at rest. To maintain equilibrium it is necessary to satisfy Newton’s first law of motion, which requires the resultant force acting on particle to be equal to zero. That is ∑F = 0 A Where ∑F = Sum of all the forces acting on the particle which is necessary condition for equilibrium. This follows from Newton’s second law of motion, which can be written as ∑F = ma. Put in equation A ma = 0 Therefore the particle acceleration a = 0. Consequently the particle indeed moves with constant velocity or at rest.
Methods for the Equilibrium of Forces: There are many methods of finding the equilibrium but the following are important 1. Analytical Method 2. Graphical Method 1. Analytical method for the equilibrium of forces.The equilibrium of forces may be studied analytically by Lami’s theorem as discussed under
Lami’s Theorem: It states, “If there are three forces acting at a point be in equilibrium then each force is proportional to the sine of the angle between the other two forces”. Let three force F1, F2 and F3 acting at a point and the opposite angles to three forces are γ , β, and α as shown in figure
Mathematically F1/Sin β = F2/Sin γ = F3 β/Sin α

There are many ways in which forces can be manipulated. It is often easier to work with a large, complicated system of forces by reducing it to an ever decreasing number of smaller problems. This is called the "resolution" of forces or force systems. This is one way to simplify what may otherwise seem to be an impossible system of forces acting on a body. Certain systems of forces are easier to resolve than others. Coplanar force systems have all the forces acting in in one plane. They may be concurrent, parallel, non-concurrent or non-parallel. All of these systems can be resolved by using graphic statics or algebra.
A concurrent coplanar force system is a system of two or more forces whose lines of action ALL intersect at a common point. However, all of the individual vectors might not acutally be in contact with the common point. These are the most simple force systems to resolve with any one of many graphical or algebraic options.

A parallel coplanar force system consists of two or more forces whose lines of action are ALL parallel. This is commonly the situation when simple beams are analyzed under gravity loads. These can be solved graphically, but are combined most easily using algebraic methods
The last illustration is of a non-concurrent and non-parallel system. This consists of a number of vectors that do not meet at a single point and none of them are parallel. These systems are essentially a jumble of forces and take considerable care to resolve.


Almost any system of known forces can be resolved into a single force called a resultant force or simply a Resultant. The resultant is a representative force which has the same effect on the body as the group of forces it replaces. (A couple is an exception to this) It, as one single force, can represent any number of forces and is very useful when resolving multiple groups of forces. One can progressively resolve pairs or small groups of forces into resultants. Then another resultant of the resultants can be found and so on until all of the forces have been combined into one force. This is one way to save time with the tedious "bookkeeping" involved with a large number of individual forces. Resultants can be determined both graphically and algebraically. The Parallelogram Method and the Triangle Method. It is important to note that for any given system of forces, there is only one resultant.



It is often convenient to decompose a single force into two distinct forces. These forces, when acting together, have the same external effect on a body as the original force. They are known as components. Finding the components of a force can be viewed as the converse of finding a resultant. There are an infinate number of components to any single force. And, the correct choice of the pair to represent a force depends upon the most convenient geometry. For simplicity, the most convenient is often the coordinate axis of a structure.
This diagram illustrates a pair of components that correspond with the X and Y axis. These are known as the rectangular components of a force. Rectangular components can be thought of as the two sides of a right angle which are at ninety degrees to each other. The resultant of these components is the hypotenuse of the triangle. The rectangular components for any force can be found with trigonometrical relationships: Fx = F cos theta, Fy = F sin theta (where theta is the angle). There are a few geometric relationships that seem common in general building practice in North America. These relationships relate to roof pitches, stair pitches, and common slopes or relationships between truss members. Some of these are triangles with sides of ratios of 3-4-5, 1-2-sqrt3, 1-1-sqrt2, 5-12-13 or 8-15-17. Commiting the first three to memory will simplify the determination of vector magnitudes when resolving more difficult problems.



When forces are being represented as vectors, it is important to should show a clear distinction between a resultant and its components. The resultant could be shown with color or as a dashed line and the components as solid lines, or vice versa. NEVER represent the resultant in the same graphic way as its components.
Any concurrent set of forces, not in equilibrium, can be put into a state of equilibrium by a single force. This force is called the Equilibrant. It is equal in magnitude, opposite in sense and co-linear with the resultant. When this force is added to the force system, the sum of all of the forces is equal to zero. A non-concurrent or a parallel force system can actually be in equilibrium with respect to all of the forces, but not be in equilibrium with respect to moments.

Graphic Statics and graphical methods of force resolution were developed before the turn of the century by Karl Culmann. They were the only methods of structural analysis for many years. These methods can help to develop an intuitive understanding of the action of the forces. Today, the Algebraic Method is considered to be more applicable to structural design. Despite this, graphical methods are a very easy way to get a quick answer for a structural design problem and can aid in the determination of structural form.
The following is an example of how an understanding of structural action and force resolution can aid in the interpretation of structural form. The illustration on the left is the Saltash Bridge, design and built by the Engineer Brunel in 1859. Notice the form of the structural elements. The illustration on the right is a retouched imaged to bring the bridge to a state which is akin to a pure suspension bridge. However, there are some issues with this design that need to be clearly understood.
Conditions for Equilibrium in 2D
Equilibrium as the condition in which the resultant of all forces and moments acting on a body is zero. Stated in another way, a body is in equilibrium if all forces and moments applied to it are in balance. These requirements are contained in the vector equations of equilibrium, Eqs. 3/1, which in two dimensions may be written in scalar form as
ΣFx = 0 Σ Fy = 0 ΣMo = 0 (3/2)
The third equation represents the zero sum of the moments of all forces about any point O on or off the body. Equations 3/2 are the necessary and sufficient conditions for complete equilibrium in two dimensions. They are necessary conditions because, if they are not satisfied, there can be no force or moment balance. They are sufficient because once they are satisfied, there can be no imbalance, and equilibrium is assured. These equations show that the acceleration of the mass center of a body is proportional to the resultant force ΣF acting on the body. Consequently, if a body moves with constant velocity (zero acceleration), the resultant force on it must be zero, and the body may be treated as in a state of translational equilibrium. For complete equilibrium in two dimensions, all three of Eqs. 3/2 must hold. However, these conditions are independent requirements, and one may hold without another. Take, for example, a body which slides along a horizontal surface with increasing velocity under the action of applied forces. The force–equilibrium equations will be satisfied in the vertical direction where the acceleration is zero, but not in the horizontal direction. Also, a body, such as a flywheel, which rotates about its fixed mass center with increasing angular speed is not in rotational equilibrium, but the two force–equilibrium equations will be satisfied.
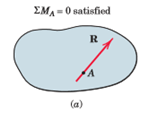
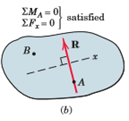
In addition to Eqs. 3/2, there are two other ways to express the general conditions for the equilibrium of forces in two dimensions. The first way is illustrated in Fig. 3/6, parts (a) and (b). For the body shown in Fig. 3/6a, if ΣMA = 0, then the resultant, if it still exists, cannot be a couple, but must be a force R passing through A. If now the equation ΣFx = 0 holds, where the x-direction is arbitrary, it follows from Fig. 3/6b that the resultant force R, if it still exists, not only must pass through A, but also must be perpendicular to the x-direction as shown. Now, if ΣMB = 0, where B is any point such that the line AB is not perpendicular to the x-direction, we see that R must be zero, and thus the body is in equilibrium. Therefore, an alternative set of equilibrium equations is
ΣFx = 0 ΣMA = 0 ΣMB = 0
where the two points A and B must not lie on a line perpendicular to the x-direction. A third formulation of the equilibrium conditions may be made for a coplanar force system. This is illustrated in Fig. 3/6, parts (c) and (d). Again, if ΣMA = 0 for any body such as that shown in Fig. 3/6c, the resultant, if any, must be a force R through A. In addition, if ΣMB 0, the resultant, if one still exists, must pass through B as shown in Fig. 3/6d. Such a force cannot exist, however, if ΣMC = 0, where C is not
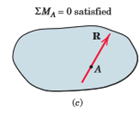
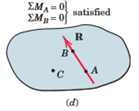
collinear with A and B. Thus, we may write the equations of equilibrium as
ΣMA = 0 ΣMB = 0 ΣMC = 0
where A, B, and C are any three points not on the same straight line. When equilibrium equations are written which are not independent, redundant information is obtained, and a correct solution of the equations will yield 0
0. For example, for a general problem in two dimensions with three unknowns, three moment equations written about three points which lie on the same straight line are not independent. Such equations will contain duplicated information, and solution of two of them can at best determine two of the unknowns, with the third equation merely verifying the identity 0 = 0.
Free Body Diagram in 2D
When a body is in equilibrium, the resultant of all forces acting on it is zero. Thus, the resultant force R and the resultant couple M are both zero, and we have the equilibrium equations
R = ΣF = 0 M = ΣM = 0(3/1)
These requirements are both necessary and sufficient conditions for equilibrium.
Free Body diagram:
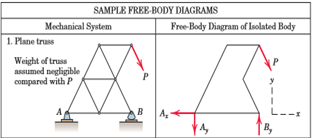
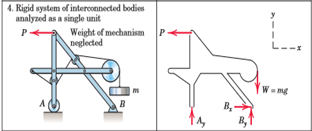
Before we apply Eqs. 3/1, we must define unambiguously the particular body or mechanical system to be analyzed and represent clearly and completely all forces acting on the body. Omission of a force which acts on the body in question, or inclusion of a force which does not act on the body, will give erroneous results. A mechanical system is defined as a body or group of bodies which can be conceptually isolated from all other bodies. A system may be a single body or a combination of connected bodies. The bodies may be rigid or nonrigid. The system may also be an identifiable fluid mass, either liquid or gas, or a combination of fluids and solids. In statics we study primarily forces which act on rigid bodies at rest, although we also study forces acting on fluids in equilibrium. Once we decide which body or combination of bodies to analyze, we then treat this body or combination as a single body isolated from all surrounding bodies. This isolation is accomplished by means of the free-body diagram, which is a diagrammatic representation of the isolated system treated as a single body. The diagram shows all forces applied to the system by mechanical contact with other bodies, which are imagined to be removed. If appreciable body forces are present, such as gravitational or magnetic attraction, then these forces must also be shown on the free-body diagram of the isolated system. Only after such a diagram has been carefully drawn should the equilibrium equations be written. Because of its critical importance, we emphasize here that
Note: The free-body diagram is the most important single step in the solution of problems in mechanics.
Before attempting to draw a free-body diagram, we must recall the basic characteristics of force. These characteristics were described in Art. 2/2, with primary attention focused on the vector properties of force. Forces can be applied either by direct physical contact or by remote action. Forces can be either internal or external to the system under consideration. Application of force is accompanied by reactive force, and both applied and reactive forces may be either concentrated or distributed. The principle of transmissibility permits the treatment of force as a sliding vector as far as its external effects on a rigid body are concerned. We will now use these force characteristics to develop conceptual models of isolated mechanical systems. These models enable us towrite the appropriate equations of equilibrium, which can then be analyzed.


Free Body Diagram in 3D
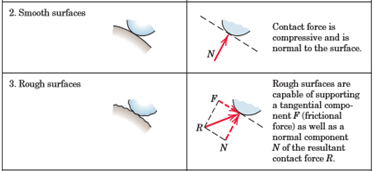
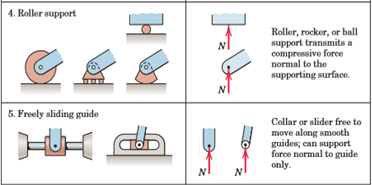
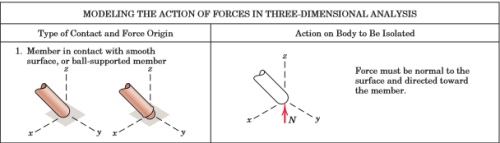
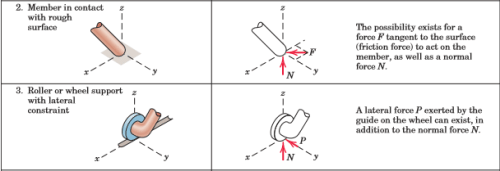
The summations in Eqs. 3/3 include the effects of all forces on the body under consideration. We learned in the previous article that the free-body diagram is the only reliable method for disclosing all forces and moments which should be included in our equilibrium equations. In three dimensions the free-body diagram serves the same essential purpose as it does in two dimensions and should always be drawn. We have our choice either of drawing a pictorial view of the isolated body with all external forces represented or of drawing the orthogonal projections of the free-body diagram. Both representations are illustrated in the sample problems at the end of this article. The correct representation of forces on the free-body diagram requires a knowledge of the characteristics of contacting surfaces. These characteristics were described in Fig. 3/1 for two-dimensional problems, and their extension to three-dimensional problems is represented in Fig. 3/8 for the most common situations of force transmission. The representations in both Figs. 3/1 and 3/8 will be used in three-dimensional analysis. The essential purpose of the free-body diagram is to develop a reliable picture of the physical action of all forces (and couples if any) acting on a body. So it is helpful to represent the forces in their correct physical sense whenever possible.
In this way, the free-body diagram becomes a closer model to the actual physical problem than it would be if the forces were arbitrarily assigned or always assigned in the same mathematical sense as that of the assigned coordinate axis. For example, in part 4 of Fig. 3/8, the correct sense of the unknowns Rx and Ry may be known or perceived to be in the sense opposite to those of the assigned coordinate axes. Similar conditions apply to the sense of couple vectors, parts 5 and 6, where their sense by the right-hand rule may be assigned opposite to that of the respective coordinate direction. By this time, you should recognize that a negative answer for an unknown force or couple vector merely indicates that its physical action is in the sense opposite to that assigned on the free-body diagram. Frequently, of course, the correct physical sense is not known initially, so that an arbitrary assignment on the free-body diagram becomes necessary.
Categories of Equilibrium
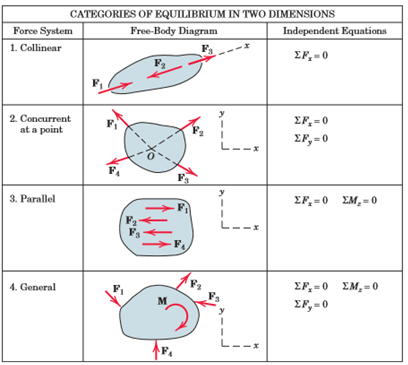
Application of Eqs. 3/3 falls into four categories which we identify with the aid of Fig. 3/9. These categories differ in the number and type (force or moment) of independent equilibrium equations required to solve the problem.
Category 1, equilibrium of forces all concurrent at point O, requires all three force equations, but no moment equations because the moment of the forces about any axis through O is zero.
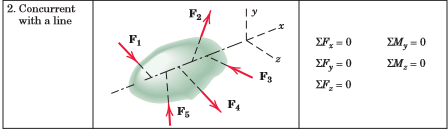
Category 2, equilibrium of forces which are concurrent with a line, requires all equations except the moment equation about that line, which is automatically satisfied.
Category 3, equilibrium of parallel forces, requires only one force equation, the one in the direction of the forces (x-direction as shown), and two moment equations about the axes (y and z) which are normal to the direction of the forces.
Category 4, equilibrium of a general system of forces, requires all three force equations and all three moment equations. The observations contained in these statements are generally quite evident when a given problem is being solved.






Equilibrium in 3D
Six scalar equations are required to express the conditions for the equilibrium of a rigid body in the general three-dimensional case, those equations are listed below:

These equations can be solved for no more than six unknowns, which generally will represent reactions at supports or connections.
During solving the most of the problems, the above scalar equations will be more conveniently obtained if we first expressed in vector form the conditions for the equilibrium of the rigid body considered.
We write and express the forces ‘F’ and position vectors ‘r’ regarding scalar components and unit vectors. Next, we compute all vector products, either by direct calculation or using determinants.

We observe that as many as three unknown reaction components may be eliminated from these computations through a judicious choice of the point ‘O’. By equating to zero the coefficients of the unit vectors in each of the two relations (see the above equation), we obtain the desired scalar equations.
|
24 videos|59 docs|53 tests
|
FAQs on Introduction: Equilibrium of a Particle - Engineering Mechanics - Civil Engineering (CE)
| 1. What is the definition of equilibrium of a particle? |  |
| 2. How is the equilibrium of a particle determined? | |
| 3. Can a particle be in equilibrium if it is moving? | |
| 4. What are the different types of equilibrium of a particle? | |
| 5. How can equilibrium of a particle be applied in real-life scenarios? | |

|
4.88/5 Rating |

|
Dec 18, 2024 Last updated |

|
Explore Courses for Civil Engineering (CE) exam
|
|
Exam
,past year papers
,practice quizzes
,Semester Notes
,ppt
,video lectures
,Viva Questions
,Introduction: Equilibrium of a Particle | Engineering Mechanics - Civil Engineering (CE)
,Introduction: Equilibrium of a Particle | Engineering Mechanics - Civil Engineering (CE)
,Summary
,Important questions
,study material
,Extra Questions
,Previous Year Questions with Solutions
,Sample Paper
,Introduction: Equilibrium of a Particle | Engineering Mechanics - Civil Engineering (CE)
,MCQs
,shortcuts and tricks
,Objective type Questions
,mock tests for examination
,Free
;






Introduction: Equilibrium of a Particle Free PDF Download
Importance of Introduction: Equilibrium of a Particle
Introduction: Equilibrium of a Particle Notes
Introduction: Equilibrium of a Particle Civil Engineering (CE) Questions
Study Introduction: Equilibrium of a Particle on the App
|
© EduRev
|
Education Revolution
|



Follow Us
|




