Introduction to Real Time Systems - 1 | Embedded Systems (Web) - Computer Science Engineering (CSE) PDF Download
Introduction
Commercial usage of computer dates back to a little more than fifty years. This brief period can roughly be divided into mainframe, PC, and post-PC eras of computing. The mainframe era was marked by expensive computers that were quite unaffordable by individuals, and each computer served a large number of users. The PC era saw the emergence of desktops which could be easily be afforded and used by the individual users. The post-PC era is seeing emergence of small and portable computers, and computers embedded in everyday applications, making an individual interact with several computers everyday.
Real-time and embedded computing applications in the first two computing era were rather rare and restricted to a few specialized applications such as space and defense. In the post-PC era of computing, the use of computer systems based on real-time and embedded technologies has already touched every facet of our life and is still growing at a pace that was never seen before. While embedded processing and Internet-enabled devices have now captured everyone’s imagination, they are just a small fraction of applications that have been made possible by real-time systems. If we casually look around us, we can discover many of them often they are camouflaged inside simple looking devices. If we observe carefully, we can notice several gadgets and applications which have today become in- dispensable to our every day life, are in fact based on embedded real-time systems.
For example, we have ubiquitous consumer products such as digital cameras, cell phones, microwave ovens, camcorders, video game sets; telecommunication domain products and applications such as set-top boxes, cable modems, voice over IP (VoIP), and video conferencing applications; office products such as fax machines, laser printers, and security systems. Besides, we encounter real-time systems in hospitals in the form of medical instrumentation equipments and imaging systems. There are also a large number of equipments and gadgets based on real-time systems which though we normally do not use directly, but never the less are still important to our daily life. A few examples of such systems are Internet routers, base stations in cellular systems, industrial plant automation systems, and industrial robots.
It can be easily inferred from the above discussion that in recent times real-time computers have become ubiquitous and have permeated large number of application areas. At present, the computers used in real-time applications vastly outnumber the computers that are being used in conventional applications. According to an estimate [3], 70% of all processors manufactured world-wide are deployed in real-time embedded applications. While it is already true that an overwhelming majority of all processors being manufactured are getting deployed in real-time applications, what is more remarkable is the unmistakable trend of steady rise in the fraction of all processors manufactured world-wide finding their way to real-time applications.
Some of the reasons attributable to the phenomenal growth in the use of real-time systems in the recent years are the manifold reductions in the size and the cost of the computers, coupled with the magical improvements to their performance. The availability of computers at rapidly falling prices, reduced weight, rapidly shrinking sizes, and their increasing processing power have together contributed to the present scenario. Applications which not too far back were considered prohibitively expensive to automate can now be affordably automated. For instance, when microprocessors cost several tens of thousands of rupees, they were considered to be too expensive to be put inside a washing machine; but when they cost only a few hundred rupees, their use makes commercial sense.
The rapid growth of applications deploying real-time technologies has been matched by the evolutionary growth of the underlying technologies supporting the development of real-time systems. In this book, we discuss some of the core technologies used in developing real-time systems. However, we restrict ourselves to software issues only and keep hardware discussions to the bare minimum. The software issues that we address are quite expansive in the sense that besides the operating system and program development issues, we discuss the networking and database issues.
In this chapter, we restrict ourselves to some introductory and fundamental issues. In the next three chapters, we discuss some core theories underlying the development of practical real-time and embedded systems. In the subsequent chapter, we discuss some important features of commercial real-time operating systems. After that, we shift our attention to realtime communication technologies and databases.
What is Real-Time?
Real-time is a quantitative notion of time. Real-time is measured using a physical (real) clock. Whenever we quantify time using a physical clock, we deal with real time. An example use of this quantitative notion of time can be observed in a description of an automated chemical plant. Consider this: when the temperature of the chemical reaction chamber attains a certain predetermined temperature, say 250oC, the system automatically switches off the heater within a predetermined time interval, say within 30 milliseconds. In this description of a part of the behavior of a chemical plant, the time value that was referred to denotes the readings of some physical clock present in the plant automation system.
In contrast to real time, logical time (also known as virtual time) deals with a qualitative notion of time and is expressed using event ordering relations such as before, after, sometimes, eventually, precedes, succeeds, etc. While dealing with logical time, time readings from a physical clock are not necessary for ordering the events. As an example, consider the following part of the behavior of library automation software used to automate the book-keeping activities of a college library: “After a query book command is given by the user, details of all matching books are displayed by the software.” In this example, the events “issue of query book command” and “display of results” are logically ordered in terms of which events follow the other. But, no quantitative expression of time was required. Clearly, this example behavior is devoid of any real-time considerations. We are now in a position to define what a real-time system is:
| A system is called a real-time system, when we need quantitative expression of time (i.e. real-time) to describe the behavior of the system. |
Remember that in this definition of a real-time system, it is implicit that all quantitative time measurements are carried out using a physical clock. A chemical plant, whose part behavior description is - when temperature of the reaction chamber attains certain predetermined temperature value, say 250oC, the system automatically switches off the heater within say 30 milliseconds - is clearly a real-time system. Our examples so far were restricted to the description of partial behavior of systems. The complete behavior of a system can be described by listing its response to various external stimuli. It may be noted that all the clauses in the description of the behavior of a real-time system need not involve quantitative measures of time. That is, large parts of a description of the behavior of a system may not have any quantitative expressions of time at all, and still qualify as a real-time system. Any system whose behavior can completely be described without using any quantitative expression of time is of course not a real-time system.
Applications of Real-Time Systems
Real-time systems have of late, found applications in wide ranging areas. In the following, we list some of the prominent areas of application of real-time systems and in each identified case, we discuss a few example applications in some detail. As we can imagine, the list would become very vast if we try to exhaustively list all areas of applications of realtime systems. We have therefore restricted our list to only a handful of areas, and out of these we have explained only a few selected applications to conserve space. We have pointed out the quantitative notions of time used in the discussed applications. The examples we present are important to our subsequent discussions and would be referred to in the later chapters whenever required.
Industrial Applications
Industrial applications constitute a major usage area of real-time systems. A few examples of industrial applications of real-time systems are: process control systems, industrial automation systems, SCADA applications, test and measurement equipments, and robotic equipments.
Example 1: Chemical Plant Control
Chemical plant control systems are essentially a type of process control application. In an automated chemical plant, a real-time computer periodically monitors plant conditions. The plant conditions are determined based on current readings of pressure, temperature, and chemical concentration of the reaction chamber. These parameters are sampled periodically. Based on the values sampled at any time, the automation system decides on the corrective actions necessary at that instant to maintain the chemical reaction at a certain rate.
Each time the plant conditions are sampled, the automation system should decide on the exact instantaneous corrective actions required such as changing the pressure, temperature, or chemical concentration and carry out these actions within certain predefined time bounds. Typically, the time bounds in such a chemical plant control application range from a few micro seconds to several milliseconds.
Example 2: Automated Car Assembly Plant
An automated car assembly plant is an example of a plant automation system. In an automated car assembly plant, the work product (partially assembled car) moves on a conveyor belt (see Fig. 28.1). By the side of the conveyor belt, several workstations are placed. Each workstation performs some specific work on the work product such as fitting engine, fitting door, fitting wheel, and spray painting the car, etc. as it moves on the conveyor belt. An empty chassis is introduced near the first workstation on the conveyor belt. A fully assembled car comes out after the work product goes past all the workstations. At each workstation, a sensor senses the arrival of the next partially assembled product. As soon as the partially assembled product is sensed, the workstation begins to perform its work on the work product. The time constraint imposed on the workstation computer is that the workstation must complete its work before the work product moves away to the next workstation. The time bounds involved here are typically of the order of a few hundreds of milliseconds.
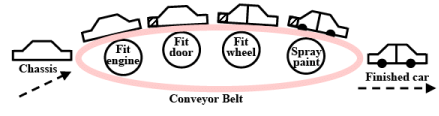
Fig. 28.1 Schematic Representation of an Automated Car Assembly Plant
Example 3: Supervisory Control And Data Acquisition (SCADA)
SCADA are a category of distributed control systems being used in many industries. A SCADA system helps monitor and control a large number of distributed events of interest. In SCADA systems, sensors are scattered at various geographic locations to collect raw data (called events of interest). These data are then processed and stored in a real-time database. The database models (or reflects) the current state of the environment. The database is updated frequently to make it a realistic model of the up-to-date state of the environment. An example of a SCADA application is an Energy Management System (EMS). An EMS helps to carry out load balancing in an electrical energy distribution network. The EMS senses the energy consumption at the distribution points and computes the load across different phases of power supply. It also helps dynamically balance the load. Another example of a SCADA system is a system that monitors and controls traffic in a computer network. Depending on the sensed load in different segments of the network, the SCADA system makes the router change its traffic routing policy dynamically. The time constraint in such a SCADA application is that the sensors must sense the system state at regular intervals (say every few milliseconds) and the same must be processed before the next state is sensed.
Medical
A few examples of medical applications of real-time systems are: robots, MRI scanners, radiation therapy equipments, bedside monitors, and computerized axial tomography (CAT).
Example 4: Robot Used in Recovery of Displaced Radioactive Material
Robots have become very popular nowadays and are being used in a wide variety of medical applications. An application that we discuss here is a robot used in retrieving displaced radioactive materials. Radioactive materials such as Cobalt and Radium are used for treatment of cancer. At times during treatment, the radioactive Cobalt (or Radium) gets dislocated and falls down. Since human beings can not come near a radioactive material, a robot is used to restore the radioactive material to its proper position. The robot walks into the room containing the radioactive material, picks it up, and restores it to its proper position. The robot has to sense its environment frequently and based on this information, plan its path. The real-time constraint on the path planning task of the robot is that unless it plans the path fast enough after an obstacle is detected, it may collide with it. The time constraints involved here are of the order of a few milliseconds.
Peripheral equipments
A few examples of peripheral equipments that contain embedded real-time systems are: laser printers, digital copiers, fax machines, digital cameras, and scanners.
Example 5: Laser Printer
Most laser printers have powerful microprocessors embedded in them to control different activities associated with printing. The important activities that a microprocessor embedded in a laser printer performs include the following: getting data from the communication port(s), typesetting fonts, sensing paper jams, noticing when the printer runs out of paper, sensing when the user presses a button on the control panel, and displaying various messages to the user. The most complex activity that the microprocessor performs is driving the laser engine. The basic command that a laser engine supports is to put a black dot on the paper. However, the laser engine has no idea about the exact shapes of different fonts, font sizes, italic, underlining, boldface, etc. that it may be asked to print. The embedded microprocessor receives print commands on its input port and determines how the dots can be composed to achieve the desired document and manages printing the exact shapes through a series of dot commands issued to the laser engine. The time constraints involved here are of the order of a few milli seconds.
Automotive and Transportation
A few examples of automotive and transportation applications of real-time systems are: automotive engine control systems, road traffic signal control, air-traffic control, high-speed train control, car navigation systems, and MPFI engine control systems.
Example 6: Multi-Point Fuel Injection (MPFI) System
An MPFI system is an automotive engine control system. A conceptual diagram of a car embedding an MPFI system is shown in Fig.28.2. An MPFI is a real-time system that controls the rate of fuel injection and allows the engine to operate at its optimal efficiency. In older models of cars, a mechanical device called the carburetor was used to control the fuel injection rate to the engine. It was the responsibility of the carburetor to vary the fuel injection rate depending on the current speed of the vehicle and the desired acceleration. Careful experiments have suggested that for optimal energy output, the required fuel injection rate is highly nonlinear with respect to the vehicle speed and acceleration. Also, experimental results show that the precise fuel injection through multiple points is more effective than single point injection. In MPFI engines, the precise fuel injection rate at each injection point is determined by a computer. An MPFI system injects fuel into individual cylinders resulting in better ‘power balance’ among the cylinders as well as higher output from each one along with faster throttle response. The processor primarily controls the ignition timing and the quantity of fuel to be injected.
The latter is achieved by controlling the duration for which the injector valve is open — popularly known as pulse width. The actions of the processor are determined by the data gleaned from sensors located all over the engine. These sensors constantly monitor the ambient temperature, the engine coolant temperature, exhaust temperature, emission gas contents, engine rpm (speed), vehicle road speed, crankshaft position, camshaft position, etc. An MPFI engine with even an 8-bit computer does a much better job of determining an accurate fuel injection rate for given values of speed and acceleration compared to a carburetor-based system. An MPFI system not only makes a vehicle more fuel efficient, it also minimizes pollution by reducing partial combustion.
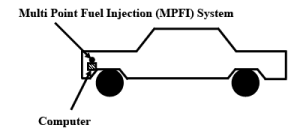
Fig. 28.2 A Real-Time System Embedded in an MPFI Car
Telecommunication Applications
A few example uses of real-time systems in telecommunication applications are: cellular systems, video conferencing, and cable modems.
Example 7: A Cellular System
Cellular systems have become a very popular means of mobile communication. A cellular system usually maps a city into cells. In each cell, a base station monitors the mobile handsets present in the cell. Besides, the base station performs several tasks such as locating a user, sending and receiving control messages to a handset, keeping track of call details for billing purposes, and hand-off of calls as the mobile moves. Call hand-off is required when a mobile moves away from a base station. As a mobile moves away, its received signal strength (RSS) falls at the base station. The base station monitors this and as soon as the RSS falls below a certain threshold value, it hands-off the details of the on-going call of the mobile to the base station of the cell to which the mobile has moved. The hand-off must be completed within a sufficiently small predefined time interval so that the user does not feel any temporary disruption of service during the hand-off. Typically call hand-off is required to be achieved within a few milliseconds.
Aerospace
A few important use of real-time systems in aerospace applications are: avionics, flight simulation, airline cabin management systems, satellite tracking systems, and computer on-board an aircraft.
Example 8: Computer On-board an Aircraft
In many modern aircrafts, the pilot can select an “auto pilot” option. As soon as the pilot switches to the “auto pilot” mode, an on-board computer takes over all controls of the aircraft including navigation, take-off, and landing of the aircraft. In the “auto pilot” mode, the computer periodically samples velocity and acceleration of the aircraft. From the sampled data, the on-board computer computes X, Y, and Z co-ordinates of the current aircraft position and compares them with the pre-specified track data. Before the next sample values are obtained, it computes the deviation from the specified track values and takes any corrective actions that may be necessary. In this case, the sampling of the various parameters, and their processing need to be completed within a few micro seconds.
Internet and Multimedia Applications
Important use of real-time systems in multimedia and Internet applications include: video conferencing and multimedia multicast, Internet routers and switches.
Example 9: Video Conferencing
In a video conferencing application, video and audio signals are generated by cameras and microphones respectively. The data are sampled at a certain pre-specified frame rate. These are then compressed and sent as packets to the receiver over a network. At the receiver-end, packets are ordered, decompressed, and then played. The time constraint at the receiver-end is that the receiver must process and play the received frames at a predetermined constant rate. Thus if thirty frames are to be shown every minute, once a frame play-out is complete, the next frame must be played within two seconds.
Consumer Electronics
Consumer electronics area abounds numerous applications of real-time systems. A few sample applications of real-time systems in consumer electronics are: set-top boxes, audio equipment, Internet telephony, microwave ovens, intelligent washing machines, home security systems, air conditioning and refrigeration, toys, and cell phones.
Example 10: Cell Phones
Cell phones are possibly the fastest growing segment of consumer electronics. A cell phone at any point of time carries out a number of tasks simultaneously. These include: converting input voice to digital signals by deploying digital signal processing (DSP) techniques, converting electrical signals generated by the microphone to output voice signals, and sampling incoming base station signals in the control channel. A cell phone responds to the communications received from the base station within certain specified time bounds. For example, a base station might command a cell phone to switch the on-going communication to a specific frequency. The cell phone must comply with such commands from the base station within a few milliseconds.
Defense Applications
Typical defense applications of real-time systems include: missile guidance systems, anti- missile systems, satellite-based surveillance systems.
Example 11: Missile Guidance System
A guided missile is one that is capable of sensing the target and homes onto it. Homing becomes easy when the target emits either electrical or thermal radiation. In a missile guidance system, missile guidance is achieved by a computer mounted on the missile. The mounted computer computes the deviation from the required trajectory and effects track changes of the missile to guide it onto the target. The time constraint on the computer-based guidance system is that the sensing and the track correction tasks must be activated frequently enough to keep the missile from diverging from the target. The target sensing and track correction tasks are typically required to be completed within a few hundreds of microseconds or even lesser time depending on the speed of the missile and the type of the target.
Miscellaneous Applications
Besides the areas of applications already discussed, real-time systems have found numerous other applications in our every day life. An example of such an application is a railway reservation system.
Example 12: Railway Reservation System
In a railway reservation system, a central repository maintains the up-to-date data on booking status of various trains. Ticket booking counters are distributed across different geographic locations. Customers queue up at different booking counters and submit their reservation requests. After a reservation request is made at a counter, it normally takes only a few seconds for the system to confirm the reservation and print the ticket.
A real-time constraint in this application is that once a request is made to the computer, it must print the ticket or display the seat unavailability message before the average human response time (about 20 seconds) expires, so that the customers do not notice any delay and get a feeling of having obtained instant results. However, as we discuss a little later (in Section 1.6), this application is an example of a category of applications that is in some aspects different from the other discussed applications. For example, even if the results are produced just after 20 seconds, nothing untoward is going to happen - this may not be the case with the other discussed applications.
|
47 videos|69 docs|65 tests
|
FAQs on Introduction to Real Time Systems - 1 - Embedded Systems (Web) - Computer Science Engineering (CSE)
| 1. What is a real-time system? |  |
| 2. What are the different types of real-time systems? | |
| 3. What are some challenges in developing real-time systems? | |
| 4. How does a real-time operating system (RTOS) differ from a general-purpose operating system? | |
| 5. What are some examples of real-time systems in everyday life? | |

|
4.93/5 Rating |

|
Dec 25, 2024 Last updated |

|
Explore Courses for Computer Science Engineering (CSE) exam
|
|
Introduction to Real Time Systems - 1 | Embedded Systems (Web) - Computer Science Engineering (CSE)
,Viva Questions
,Introduction to Real Time Systems - 1 | Embedded Systems (Web) - Computer Science Engineering (CSE)
,Exam
,study material
,video lectures
,mock tests for examination
,ppt
,past year papers
,Sample Paper
,shortcuts and tricks
,Introduction to Real Time Systems - 1 | Embedded Systems (Web) - Computer Science Engineering (CSE)
,Previous Year Questions with Solutions
,Important questions
,practice quizzes
,Summary
,Semester Notes
,Extra Questions
,Free
,MCQs
,Objective type Questions
;






Introduction to Real Time Systems - 1 Free PDF Download
Importance of Introduction to Real Time Systems - 1
Introduction to Real Time Systems - 1 Notes
Introduction to Real Time Systems - 1 Computer Science Engineering (CSE) Questions
Study Introduction to Real Time Systems - 1 on the App
|
© EduRev
|
Education Revolution
|



|




