Linear Ordinary Differential Equations of First and Second Order - 5 | Physics for IIT JAM, UGC - NET, CSIR NET PDF Download

Repeated roots; reduction of order
For the characteristic equation ar2 + br + c = 0, if b2 = 4ac, we will have two repeated roots
We have one solution  . How can we find the second solution which is linearly independent of y1?
. How can we find the second solution which is linearly independent of y1?
From experience in an earlier example, we claim that is a solution. To prove this claim, we plug it back into the equation. If r¯ is the double root, then, the characteristic equation can be written

which gives the equation

We can check if y2 satisfies this equation. We have

Put into the equation, we get

Finally, we must make sure that y1, y2 are linearly independent. We compute their Wronskian

We conclude now, the general solution is

Example 1. (not covered in class) Consider the equation y′′ + 4y′ + 4y = 0. We have r2 + 4r + 4 = 0, and r1 = r2 = r = −2. So one solution is y1 = e−2t . What is y2?
Method 1. Use Wronskian and Abel’s Theorem. By Abel’s Theorem we have

By the definition of Wronskian we have

They must equal to each other:

Solve this for y2,

Let C = 0, we get y2 = te−2t , and the general solution is

Method 2. This is the textbook’s version. We guess a solution of the form y2 = v(t)y1 = v(t)e−2t , and try to find the function v(t). We have

Put them in the equation

Note that the term c2 e−2t is already contained in cy1 .
Therefore we can choose c1 = 1, c2 = 0, and get y2 = te−2t , which gives the same general solution as Method 1. We observe that this method involves more computation than Method 1.
A typical solution graph is included below:
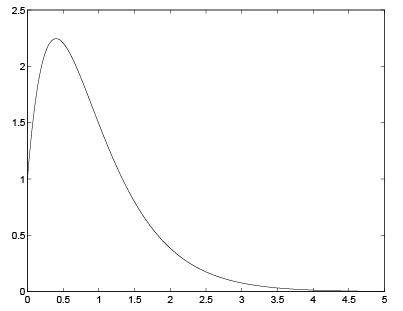
We see if c2 > 0, y increases for small t. But as t grows, the exponential (decay) function dominates, and solution will go to 0 as t → ∞.
One can show that in general if one has repeated roots r1 = r2 = r, then y1 = ert and y2 = tert , and the general solution is

Example 2. Solve the IVP

Answer.This follows easily now

The ICs give
y(0) = 2 : c1 + 0 = 2, ⇒ c1 = 2.
y′(t) = (c1 + c2 t)et + c2 et , y′(0) = c1 + c2 = 1, ⇒ c2 = 1 − c1 = −1.
So the solution is y(t) = (2 − t)et .
Summary: For ay′′ + by′ + cy = 0, and ar2 + br + c = 0 has two roots r1, r2 , we have
On reduction of order: This method can be used to find a second solution y2 if the first solution y1 is given for a second order linear equation.
Example 3. For the equation

given one solution  find a second linearly independent solution.
find a second linearly independent solution.
Answer.Method 1: Use Abel’s Theorem and Wronskian. By Abel’s Theorem, and choose C = 1, we have

By definition of the Wronskian,

Solve this for y2:


Method 2. We will use Abel’s Theorem, and at the same time we will seek a solution of the form y1 = vy1.
By Abel’s Theorem, we have ( worked out in M1) W (y1, y2)  . Now, seek y2 = vy1.
. Now, seek y2 = vy1.
By the definition of the Wronskian, we have

Note that this is a general formula:

Now putting y1 = 1/t, we get

Drop the constant 3/2 , we get
We see that Method 3 is the most efficient one among all three methods. We will focus on this method from now on.
Example 4. Consider the equation

Given y1 = t, find the general solution.
Answer. We have

Let y2 be the second solution. By Abel’s Theorem, choosing c = 1, we have


(A cheap trick to double check your solution y2 would be: plug it back into the equation and see if it satisfies it.) The general solution is

We observe here that Method 2 is very efficient.
Example 5. Given the equation find y2
find y2
Answer.We will always use method 2. We see that p = 0. By Abel’s Theorem, setting c = 1, we have


So drop the constant  , we get
, we get

The general solution is

Non-homogeneous equations; method of undetermined coefficients
Want to solve the non-homogeneous equation

Steps:
1. First solve the homogeneous equation
y′′ + p(t)y′ + q(t)y = 0, (H )
i.e., find y1, y2, linearly independent of each other, and form the general solution
yH = c1 y1 + c2 y2.
2. Find a particular/specific solution Y for (N), by MUC (method of undetermined coefficients);
3. The general solution for (N) is then
y = yH + Y = c1y1 + c2y2 + Y .
Find c1 , c2 by initial conditions, if given.
Key step: step 2.
Why y = yH + Y ?
A quick proof: If yH solves (H), then
y′′H + p(t)y′H + q(t)yH = 0, (A)
and since Y solves (N), we have
Y ′′ + p(t)Y ′ + q(t)Y = g(t), (B )
Adding up (A) and (B), and write y = yH + Y , we get y′′ + p(t)y′ + q(t)y = g(t).
Main focus: constant coefficient case, i.e.,
ay′′ + by′ + cy = g(t).
Example 1. Find the general solution for y′′ − 3y′ − 4y = 3e2t .
Answer.Step 1: Find yH .
r2 − 3r − 4 = (r + 1)(r − 4) = 0, ⇒ r1 = −1, r2 = 4, so
yH = c1 e−t + c2 e4t.
Step 2: Find Y . We guess/seek solution of the same form as the source term Y = Ae2t , and will determine the coefficient A.
Y ′ = 2Ae2t , Y ′′ = 4Ae2t .
Plug these into the equation:

Step 3. The general solution to the non-homogeneous solution is

Observation: The particular solution Y take the same form as the source term g(t).
But this is not always true.
Example 2. Find general solution for y′′ − 3y′ − 4y = 2e−t .
Answer.The homogeneous solution is the same as Example 1:  For the particular solution Y , let’s first try the same form as g, i.e., Y = Ae−t . So Y ′ = −Ae−t , Y ′′ = Ae−t . Plug them back in to the equation, we get
For the particular solution Y , let’s first try the same form as g, i.e., Y = Ae−t . So Y ′ = −Ae−t , Y ′′ = Ae−t . Plug them back in to the equation, we get

So it doesn’t work. Why?
We see r1 = −1 and y1 = e−t, which means our guess Y = Ae−t is a solution to the homogeneous equation. It will never work.
Second try: Y = Ate−t . So

Plug them in the equation

we get
so we have Y =
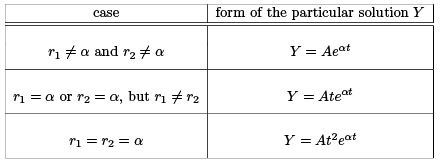
Summary 1. If g(t) = aeαt , then the form of the particular solution Y depends on r1 , r2 (the roots of the characteristic equation).
Example 3. Find the general solution for

Answer.The yH is the same yH = 
Note that g(t) is a polynomial of degree 2. We will try to guess/seek a particular solution of the same form:
Y = At2 + Bt + C, Y ′ = 2At + B, Y ′′ = 2A
Plug back into the equation

Compare the coefficient, we get three equations for the three coefficients A, B , C :
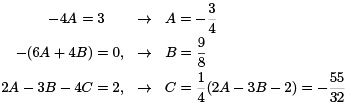
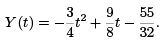
So we get
But sometimes this guess won’t work.
Example 4. Find the particular solution for y′′ − 3y′ = 3t2 + 2.
Answer.We see that the form we used in the previous example Y = At2 + Bt + C won’t work because Y′′ − 3Y′ will not have the term t2 .
New try: multiply by a t. So we guess Y = t(At2 + B t + C ) = At3 + B t2 + Ct. Then
Y ′ = 3At2 + 2B t + C, Y ′′ = 6At + 2B .
Plug them into the equation
(6At + 2B) − 3(3At2 + 2Bt + C ) = −9At2 + (6A − 6B)t + (2B − 3C ) = 3t2 + 2.
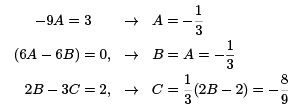
Compare the coefficient, we get three equations for the three coefficients A, B , C :

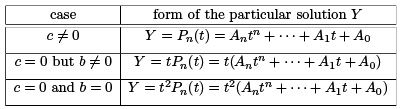
Summary 2. If g(t) is a polynomial of degree n, i.e.,

the particular solution for
ay′′ + by′ + cy = g(t)
(where a = 0) depends on b, c:
Example 5. Find a particular solution for
y′′ − 3y′ − 4y = sin t.
Answer.Since g(t) = sin t, we will try the same form. Note that (sin t)′ = cos t, so we must have the cos t term as well. So the form of the particular solution is
Y = A sin t + B cos t.
Then Y ′ = A cos t − B sin t, Y ′′ = −A sin t − B cos t.
Plug back into the equation, we get (−A sin t − B cos t) − 3(A cos t − B sin t) − 4(A sin t + b cos t) = (−5A + 3B ) sin t + (−3A − 5B ) cos t = sin t.
So we must have

So we get
We observe that: (1). If the right-hand side is g(t) = a cos t, then the same form would work; (2). More generally, if g(t) = a sin t + b sin t for some a, b, then the same form still work.
However, this form won’t work if it is a solution to the homogeneous equation.
Example 6. Find a general solution for y′′ + y = sin t.
Answer. Let’s first find yH . We have r2 + 1 = 0, so r1,2 = ±i, and yH = c1 cos t + c2 sin t.
For the particular solution Y : We see that the form Y = A sin t + B cos t won’t work because it solves the homogeneous equation.
Our new guess: multiply it by t, so
Y (t) = t(A sin t + B cos t).
Then
Y ′ = (A sin t + B cos t) + t(A cos t + B sin t), Y ′′ = (−2B − At) sin t + (2A − B t) cos t.
Plug into the equation

So
The general solution is

Summary 3. If g(t) = a sin αt + b cos αt, the form of the particular solution depends on the roots r1 , r2.
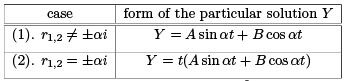
Note that case (2) occurs when the equation is y′′ + α2 y = a sin αt + b cos αt.
We now have discovered some general rules to obtain the form of the particular solution for the non-homogeneous equation ay′′ + by′ + cy = g(t).
- Rule (1). Usually, Y take the same form as g(t);
- Rule (2). Except, if the form of g(t) provides a solution to the homogeneous equation.
Then, one can multiply it by t.
- Rule (3). If the resulting form in Rule (2) is still a solution to the homogeneous equation, then, multiply it by another t.
Next we study a couple of more complicated forms of g.
Example 7. Find a particular solution for
y′′ − 3y′ − 4y = tet .
Answer. We see that g = P1 (t)eat , where P1 is a polynomial of degree
1. Also we see r1 = −1, r2 = 4, so r1 = a and r2 = a. For a particular solution we will try the same form as g, i.e., Y = (At + B )et. So
Plug them into the equation,

We must have −6At − A − 6B = t, i.e.,

However, if the form of g is a solution to the homogeneous equation, it won’t work for a particular solution. We must multiply it by t in that case.
Example 8. Find a particular solution of
y′′ − 3y′ − 4y = te−t .
Answer.Since a = −1 = r1, so the form we used in Example 7 won’t work here. (Can you intuitively explain why?)
Try a new form now Y = t(At + B )e−t = (At2 + B t)e−t.
Then

Plug into the equation

So we must have −10At + 2A − 5B = t, which means

Then
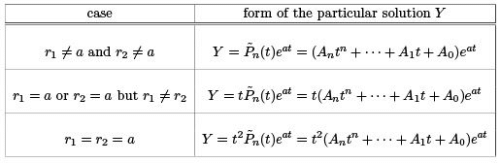
Summary 4. If g(t) = Pn (t)eat where Pn(t) = αntn + · · · + α1 t + α0 is a polynomial of degree n, then the form of a particular solution depends on the roots r1, r2 .
Other cases of g are treated in a similar way: Check if the form of g is a solution to the homogeneous equation. If not, then use it as the form of a particular solution. If yes, then multiply it by t or t2 .
We summarize a few cases below.
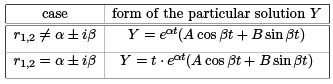
Summary 5. If g(t) = eαt (a cos β t + b sin β t), and r1, r2 are the roots of the characteristic equation. Then
Summary 6. If g(t) = Pn(t)eαt (a cos β t + b sin β t) where Pn (t) is a polynomial of degree n, and r1, r2 are the roots of the characteristic equation. Then

More terms in the source. If the source g(t) has several terms, we treat each separately and add up later. Let g(t) = g1 (t) + g2 (t) + · · · gn (t), then, find a particular solution Yi for each gi(t) term as if it were the only term in g, then Y = Y1 + Y2 + · · · Yn . This claim follows from the principle of superposition. (Can you provide a brief proof ?)
In the examples below, we want to write the form of a particular solution.
Example 9. y′′ − 3y′ − 4y = sin 4t + 2e4t + e5t − t.
Answer.Since r1 = −1, r2 = 2, we treat each term in g separately and the add up: Y (t) = A sin 4t + B cos 4t + C te4t + De5t + (E t + F ).
Example 10. y′′ + 16y = sin 4t + cos t − 4 cos 4t + 4.
Answer.The char equation is r2 + 16 = 0, with roots r1,2 = ±4i, and yH = c1 sin 4t + c2 cos 4t.
We also note that the terms sin 4t and −4 cos 4t are of the same type, and we must multiply it by t. So
Y = t(A sin 4t + B cos 4t) + (C cos t + D sin t) + E .
Example 11. y′′ − 2y′ + 2y = et cos t + 8et sin 2t + te−t + 4e−t + t2 − 3.
Answer.The char equation is r2 − 2r + 2 = 0 with roots r1,2 = 1 ± i. Then, for the term et cos t we must multiply by t.
FAQs on Linear Ordinary Differential Equations of First and Second Order - 5 - Physics for IIT JAM, UGC - NET, CSIR NET
| 1. What is a linear ordinary differential equation of first order? |  |
| 2. What is a linear ordinary differential equation of second order? | |
| 3. How can linear ordinary differential equations of first order be solved? | |
| 4. What are the applications of linear ordinary differential equations in physics? | |
| 5. Can linear ordinary differential equations of second order be solved analytically? | |



Previous Year Questions with Solutions
,mock tests for examination
,UGC - NET
,CSIR NET
,Summary
,Linear Ordinary Differential Equations of First and Second Order - 5 | Physics for IIT JAM
,ppt
,Important questions
,CSIR NET
,past year papers
,Linear Ordinary Differential Equations of First and Second Order - 5 | Physics for IIT JAM
,Free
,Viva Questions
,practice quizzes
,CSIR NET
,shortcuts and tricks
,Extra Questions
,Objective type Questions
,Sample Paper
,Linear Ordinary Differential Equations of First and Second Order - 5 | Physics for IIT JAM
,UGC - NET
,MCQs
,video lectures
,UGC - NET
,Semester Notes
,Exam
,study material
;






Linear Ordinary Differential Equations of First and Second Order - 5 Free PDF Download
Importance of Linear Ordinary Differential Equations of First and Second Order - 5
Linear Ordinary Differential Equations of First and Second Order - 5 Notes
Linear Ordinary Differential Equations of First and Second Order - 5 Physics Questions
Study Linear Ordinary Differential Equations of First and Second Order - 5 on the App
|
© EduRev
|
Education Revolution
|



|





