Matrix Representation of Linear Transformations - Matrix Algebra, CSIR-NET Mathematical Sciences | Mathematics for IIT JAM, GATE, CSIR NET, UGC NET PDF Download

Matrix transformations
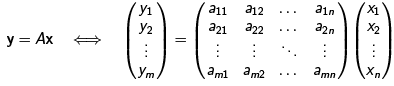
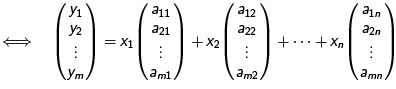
Theorem Suppose L : Rn → Rm is a linear map. Then there exists an m×n matrix A such that L(x) = Ax for all x ∈ Rn . Columns of A are vectors L(e1), L(e2), . . . , L(en), where e1 , e2 , . . . , en is the standard basis for Rn .
Basis and coordinates
If {v1, v2, . . . , vn} is a basis for a vector space V , then any vector v ∈ V has a unique representation v = x1v1 + x2v2 + · · · + xn vn , where xi ∈ R. The coefficients x1, x2, . . . , xn are called the coordinates of v with respect to the ordered basis v1, v2, . . . , vn.
The mapping vector v → its coordinates (x1, x2, . . . , xn) provides a one-to-one correspondence between V and Rn . Besides, this mapping is linear.
Change of coordinates
Let V be a vector space.
Let v1, v2, . . . , vn be a basis for V and g1 : V → Rn be the coordinate mapping corresponding to this basis.
Let u1, u2, . . . , un be another basis for V and g2 : V → Rn be the coordinate mapping corresponding to this basis.
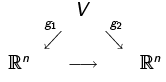
The composition g2◦g1−1 is a linear mapping of Rn to itself. It is represented as x → U x, where U is an n×n matrix.
U is called the transition matrix from v1 , v2 . . . , vn to u1 , u2 . . . , un . Columns of U are coordinates of the vectors v1 , v2 , . . . , vn with respect to the basis u1 , u2 , . . . , un.
Matrix of a linear transformation
Let V , W be vector spaces and f : V → W be a linear map.
Let v1, v2, . . . , vn be a basis for V and g1 : V → Rn be the coordinate mapping corresponding to this basis.
Let w1, w2, . . . , wm be a basis for W and g2 : W → Rm be the coordinate mapping corresponding to this basis.
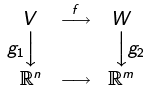
The composition g2◦f ◦g1−1 is a linear mapping of Rn to Rm. It is represented as x → Ax, where A is an m×n matrix.
A is called the matrix of f with respect to bases v1 , . . . , vn and w1, . . . , wm . Columns of A are coordinates of vectors f (v1), . . . , f (vn) with respect to the basis w1 , . . . , wm.
Examples. • D : P3 → P2, (Dp)(x) = p′(x).
Let AD be the matrix of D with respect to the bases 1, x , x2 and 1, x . Columns of AD are coordinates of polynomials D1, Dx , Dx2 w.r.t. the basis 1, x.

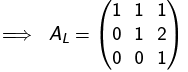
• L : P3 → P3, (Lp)(x ) = p(x + 1).
Let AL be the matrix of L w.r.t. the basis 1, x , x 2. L1 = 1, Lx = 1 + x, Lx2 = (x + 1)2 = 1 + 2x + x2.
Problem. Consider a linear operator L on the vector space of 2×2 matrices given by
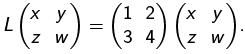
Find the matrix of L with respect to the basis

Let ML denote the desired matrix.
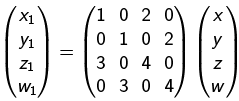
By definition, ML is a 4×4 matrix whose columns are coordinates of the matrices L(E1), L(E2), L(E3), L(E4) with respect to the basis E1 , E2 , E3 , E4 .
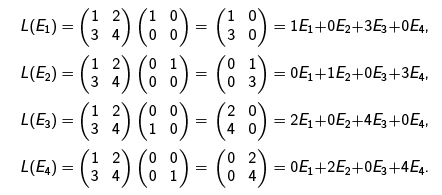
It follows that
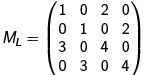
Thus the relation
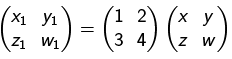
is equivalent to the relation
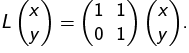
Problem. Consider a linear operator L : R2 → R2,
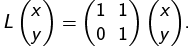
Find the matrix of L with respect to the basis v1 = (3, 1), v2 = (2, 1).
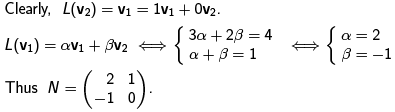
Let N be the desired matrix. Columns of N are coordinates of the vectors L(v1) and L(v2) w.r.t. the basis v1, v2.

Change of basis for a linear operator
Let L : V → V be a linear operator on a vector space V.
Let A be the matrix of L relative to a basis a1, a2 , . . . , an for V . Let B be the matrix of L relative to another basis b1 , b2 , . . . , bn for V .
Let U be the transition matrix from the basis a1, a2 , . . . , an to b1 , b2 , . . . , bn .
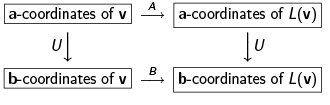
It follows that UA = BU .
Then A = U−1BU and B = UAU −1.
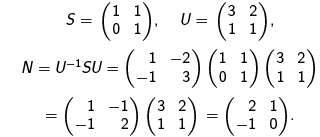
Problem. Consider a linear operator L : R2 → R2,
Find the matrix of L with respect to the basis v1 = (3, 1), v2 = (2, 1).
Let S be the matrix of L with respect to the standard basis, N be the matrix of L with respect to the basis v1, v2, and U be the transition matrix from v1, v2 to e1, e2.
Then N = U−1SU .
|
558 videos|198 docs
|
FAQs on Matrix Representation of Linear Transformations - Matrix Algebra, CSIR-NET Mathematical Sciences - Mathematics for IIT JAM, GATE, CSIR NET, UGC NET
| 1. What is a linear transformation? |  |
| 2. How can linear transformations be represented using matrices? | |
| 3. What are the properties of matrix representations of linear transformations? | |
| 4. How can we determine if a matrix represents a linear transformation? | |
| 5. Can all linear transformations be represented using matrices? | |



Matrix Representation of Linear Transformations - Matrix Algebra
,Viva Questions
,CSIR-NET Mathematical Sciences | Mathematics for IIT JAM
,Summary
,UGC NET
,UGC NET
,practice quizzes
,UGC NET
,GATE
,GATE
,Sample Paper
,MCQs
,CSIR NET
,Extra Questions
,CSIR NET
,Important questions
,Free
,Previous Year Questions with Solutions
,study material
,ppt
,GATE
,Matrix Representation of Linear Transformations - Matrix Algebra
,CSIR-NET Mathematical Sciences | Mathematics for IIT JAM
,Objective type Questions
,Exam
,CSIR NET
,mock tests for examination
,Semester Notes
,CSIR-NET Mathematical Sciences | Mathematics for IIT JAM
,shortcuts and tricks
,past year papers
,Matrix Representation of Linear Transformations - Matrix Algebra
,video lectures
;


Matrix Representation of Linear Transformations - Matrix Algebra, CSIR-NET Mathematical Sciences Free PDF Download
Importance of Matrix Representation of Linear Transformations - Matrix Algebra, CSIR-NET Mathematical Sciences
Matrix Representation of Linear Transformations - Matrix Algebra, CSIR-NET Mathematical Sciences Notes
Matrix Representation of Linear Transformations - Matrix Algebra, CSIR-NET Mathematical Sciences Mathematics Questions
Study Matrix Representation of Linear Transformations - Matrix Algebra, CSIR-NET Mathematical Sciences on the App
|
© EduRev
|
Education Revolution
|



|





