Mechanical Vibrations - Engineering Mechanics - Mechanical Engineering PDF Download

Degree of Freedom
The number of independent coordinates required to describe completely the motion/position of a system at any time is called Degree of Freedom
A rigid body in space has six degrees of freedom, three co-ordinates (x, y and z) to define rectilinear position and three parameters to define the angular positions. The constraints to the motion reduce the degee of freedom of the system.
1. Single Degree of Freedom System
2. Multiple Degree of Freedom system
A. CLASSIFICATION OF VIBRATIONS
Classification Based on Exciting Force
1. Free Vibration : Vibrations in which after the initial displacement/velocity, no external forces act on the body and the vibration is maintained by the internal elastic forces is called Natural Vibration Eg : vibration in string, motion of pendulum
2. Forced Vibration : When a body vibrates under the influence of a continuous periodic disturbing internal or external force, then the body is said to be under forced vibration Eg : vibration in rotating engines
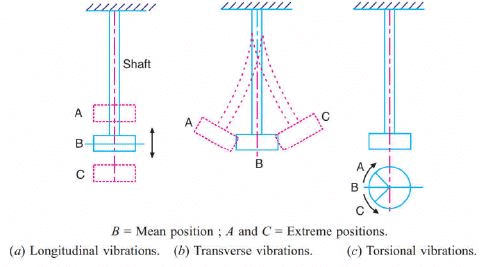
Classification Based on Direction of Motion
1. Longitudinal Vibration: When the particles of bar or disc move parallel to the axis of the shaft, then the vibrations are called longitudinal vibrations.
2. Transverse Vibration: When the particles of the bar or disc move approximately perpendicular to the axis of the shaft on either side in the transverse direction, then the vibrations are known as transverse vibrations.
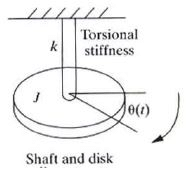
3. Torsional Vibration: When the particles of the bar or disc get alternately twisted and untwisted on account of vibratory motion of suspended body, it is said to be undergoing torsional vibrations.
Damped vibrations and resonance
1. Damped Vibrations :The vibrations of a body whose amplitude goes on reducing over every cycle of vibrations are known as damped vibrations. This is due to the fact that a certain amount of energy possessed by the vibrating body is always dissipated in overcoming frictional resistance to the motion.
2. Resonance : When the frequency of external force is equal to the natural frequency of the vibrations, resonance takes place, amplitude or deformation or displacement will reach to its maximum at resonance and the system will fail due to breakdown. This state of disturbing force on the vibrating body is known as the state of resonance.
Periodic and Oscillatory motion
1. Periodic Motion : A motion which repeats itself at regular intervals of time is called a periodic motion. Eg – motion of pendulum, motion of planets around sun
2. Oscillatory Motion :If a body is moving back and forth repeatedly about a mean position, it is said to possess oscillatory motion. Eg - motion of the pendulum, vibrations of the string
An oscillatory motion is always periodic. A periodic motion may or may not be oscillatory. For example, the motion of planets around the Sun is always periodic but not oscillatory. The motion of the pendulum of a clock is periodic as well as oscillatory.
General Terms in Vibratory Motion
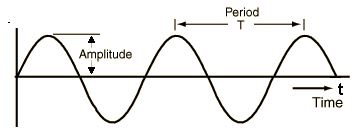
1. Time Period :The time interval after which the motion is repeated itself is called time period. It is usually expressed in seconds.
2. Cycle :The motion completed during one time period is called cycle.
3. Frequency :The number of cycles executed in one second is called frequency. It is usually expressed in hertz (Hz).
4. Amplitude : The maximum displacement from the mean position is called the amplitude
B. SIMPLE HARMONIC MOTION (SHM)
A body is said to move in Simple Harmonic motion if it satisfies the following conditions
- The motion should be oscillatory periodic motion with elastic restoring force acting on the system.
- The acceleration of the system is directly proportional to its displacement from the mean position at any instant of time
- The acceleration is always directed towards the mean position
Eg : motion of a pendulum, motion of body attached to elastic spring
Equations of SHM Simple
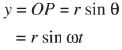
Harmonic Motion can be modelled as the projection of a particle rotating at a constant angular velocity ω rotating about a point O with a radius r equal to the amplitude
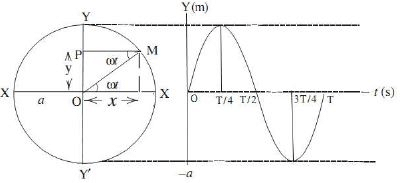
Let P be the position of the particle at some instant after t sec from X. Therefore, angle turned by the particle
Projection of point P about the y-axis is given as
Differentiating with respect to time t
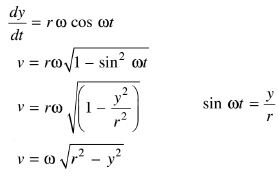
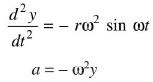
Further differentiating with respect to time t
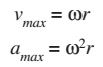
Max Displacement, Velocity and Acceleration Equations
Similarly, the projection of the point P along the x-axis also satisfies the Simple Harmonic Motion.
Expressing the acceleration in terms of x.
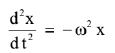
Expressing it in the standard format
General Equations
1. Time Period
2. Frequency
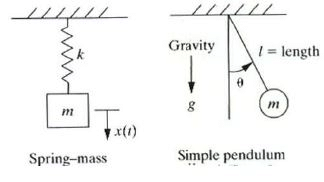
C. UNDAMPED FREE VIBRATION
In this approach, the free undamped vibration of an object is modelled as mass-spring system.
Consider a compact mass m that slides over a frictionless horizontal surface. Suppose that the mass is attached to one end of a light horizontal spring of stiffness k whose other end is anchored in an immovable wall.
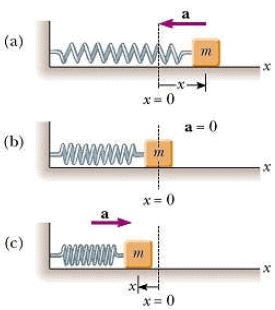
The following forces act on the system
1. Restoring Force of the spring due to its stiffness
2. The weight of the body
3. The normal reaction
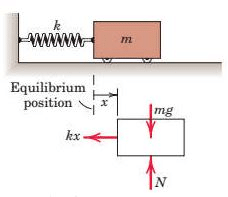
Since the system does not undergo vertical deflection, ΣFy = 0
Since the system vibrates along x axis
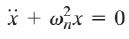
Rearranging the terms into a “standard form” gives
This equation is synonymous to the equation of motion of SHM. Hence, spring mass model can be considered as a body executing SHM with a natural frequency given by
General Equations
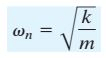
1. Natural Angular Frequency
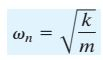
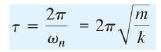
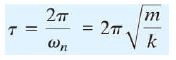
2. Time Period
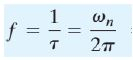
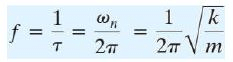
3. Frequency
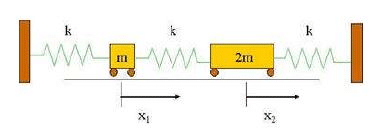
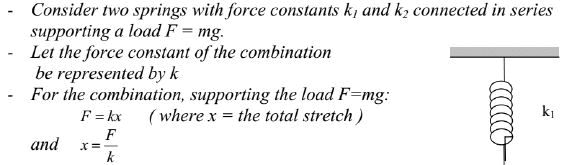
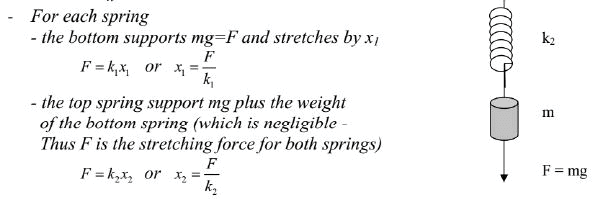
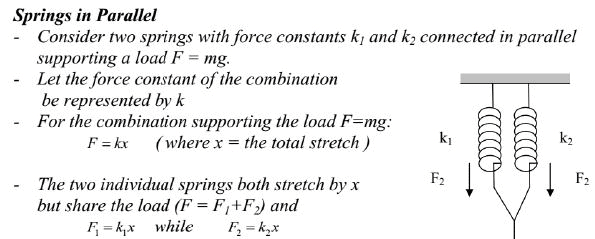
COMBINATION OF SPRINGS
FAQs on Mechanical Vibrations - Engineering Mechanics - Mechanical Engineering
| 1. What is mechanical vibration? |  |
| 2. Why is the study of mechanical vibrations important in engineering? | |
| 3. What are the types of mechanical vibrations? | |
| 4. How are mechanical vibrations measured? | |
| 5. What are some applications of mechanical vibrations in engineering? | |



Viva Questions
,Mechanical Vibrations - Engineering Mechanics - Mechanical Engineering
,Important questions
,Extra Questions
,Free
,Summary
,video lectures
,Semester Notes
,Previous Year Questions with Solutions
,MCQs
,practice quizzes
,study material
,ppt
,past year papers
,shortcuts and tricks
,Objective type Questions
,mock tests for examination
,Sample Paper
,Exam
,Mechanical Vibrations - Engineering Mechanics - Mechanical Engineering
,Mechanical Vibrations - Engineering Mechanics - Mechanical Engineering
;






Mechanical Vibrations - Engineering Mechanics Free PDF Download
Importance of Mechanical Vibrations - Engineering Mechanics
Mechanical Vibrations - Engineering Mechanics Notes
Mechanical Vibrations - Engineering Mechanics Mechanical Engineering Questions
Study Mechanical Vibrations - Engineering Mechanics on the App
|
© EduRev
|
Education Revolution
|



|




