Modern Power System Operation and Control, Different Types of Power System Analysis - Electrical Engineering (EE) PDF Download
Introduction
Electricity is the most preferred used form of energy used in industry, homes, businesses and transportation. It can be easily and efficiently transported from the production centers to the point of use. It is highly flexible in use as it can be converted to any desired form like mechanical, thermal, light, chemical etc.
An electrical power system is made up of many components connected together to form a large, complex system that is capable of generating, transmitting and distributing electrical energy over large areas.
The structure of electrical power system
The basic structure of modern day power system is shown in Fig. 1.1. A power system is usually divided into three parts: generation, transmission and distribution system.
Generation
Electricity is produced by converting the mechanical energy into electrical energy. In majority of cases, the mechanical energy is either obtained from thermal energy or provided by the flowing water.
The main sources of thermal energy sources are coal, natural gas, nuclear fuel and oil. The use of non-fossil fuels such as wind, solar, tidal, and geothermal and biogas in electricity generation is also increasing. Hydro-power is the main non-thermal source of mechanical energy used in electricity generation. The conversion of mechanical to electrical energy is done using synchronous generators in majority of power plants. Few wind generation systems use induction generators. The power is usually generated at low voltage, between 11 and 35 KV, and then fed into the transmission system using a step up transformer.
Transmission system
The electricity is generated in bulk in the generating stations and then transmitted over long distances to the load points. The transmission system interconnects all the generating stations and major load centers in the system. It forms the back bone of the power system. Since the power loss in a transmission line is proportional to the square of line current, the transmission lines operate at the highest voltage levels, usually 220 KV and upwards. Usually the transmission network has a meshed structure in order to provide many alternate routes for the power to flow from the generators to the load points. This improves the reliability of the system.
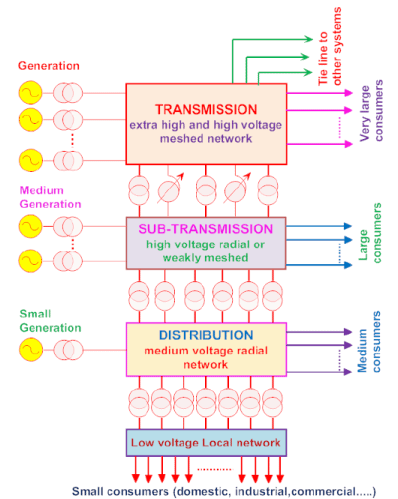
Figure 1.1: Structure of a Power System
High voltage transmission lines are terminated at substations. Very large industrial customers may be provided power directly from these substations. At these substations, the voltage is stepped down to a lower level and fed into the sub-transmission system. This part of the transmission system connects the high voltage substation through step down transformers to distribution substation. Typically the sub-transmission voltage levels are from 66 KV to 132 KV. Some large industrial consumers may be served directly from the sub-transmission system.
The transmission lines connect the neighboring power systems at transmission levels, thus forming a grid. The grid is the network of multiple generating resources and several layers of transmission network. The interconnections of power systems offer the following advantages.
(a) Quality: The voltage profile of the transmission network improves as more generators contribute to the system, resulting in an increased total system capability. This also improves the frequency behavior of the system following any load perturbation due to increased inertia of the system.
(b) Economy: In interconnected systems, it is possible to reduce the total set of generating plants required to maintain the desired level of generation reserve. This results in reduction of operational and investment costs. Also, operational (including plant start-ups and shut down) and generation scheduling of units can be more economically coordinated.
(c) Security: In case of emergency, power can be made available from the neighboring systems and each system can benefit even when individual spinning reserves may not be sufficient for isolated operation.
Distribution system
The distribution represents the final stage of power transfer to the individual consumer. The distribution network is generally connected in a radial structure. The primary distribution voltage is typically between 11 KV and 33 KV. Small industrial customers are supplied by primary feeders at this voltage level. The secondary distribution feeders supply residential and commercial at 415/240 V. Small generating plants located near the load centers are usually connected to sub-transmission or distribution system directly.
A power system operates in a normal state, if the following conditions are satisfied:
- The bus voltages are within the prescribed limits.
- The system frequency is within the specified limits.
- The active and reactive power balance exists in the system.
However, the system load varies continuously and hence, in order to ensure satisfactory system operation, proper controls have to be provided in a power system.
Power system control structure
The various elements of power system operation and control are shown in Table 1.1 along with the time-scale of operation.
Power system control
A properly designed and operated power system must meet the following requirements:
Table 1.1: Various elements of power system operation and control
| Operation and control action | Time period |
1 | Relaying execution control, system voltage control | Multi seconds |
2 | System frequency control tie-line power control | Few seconds to few minutes |
3 | Economic dispatch | Few minutes to few hours |
4 | System security analysis | Few minutes to few hours |
5 | Unit commitment | Few hours to few weeks |
6 | Maintenance scheduling | One month to one year |
7 | System planning | One year to 10 years |
(a) The system must have adequate capability to meet the continuously varying active and reactive power demand of system load. This requires maintaining and approximately controlling adequate spinning reserve of active and reactive power at all time instants.
(b) The system should be designed and operated so as to supply electrical energy at minimum cost and with minimum adverse ecological impact.
(c) The electrical power supplied to the consumers must meet certain minimum quality standards with respect to the following:
i) The network frequency should be maintained within a range of ±3 percent of its ‘nominal’ value.
ii) The voltage magnitudes should be maintained within a range of ±10 percent of the corresponding ‘nominal’ value at each network bus bar.
iii) The supply should meet a desired level of reliability to ensure supply continuity as far as possible.
(d) It should maintain scheduled tie-line flow and contractual power exchange.
To meet the requirements at points i), ii) and iii) above, several levels of controls incorporating a large number of devices are needed. These controls are as shown in Fig. 1.2.
A brief explanation of various power system controllers is given next.
Generating unit controls
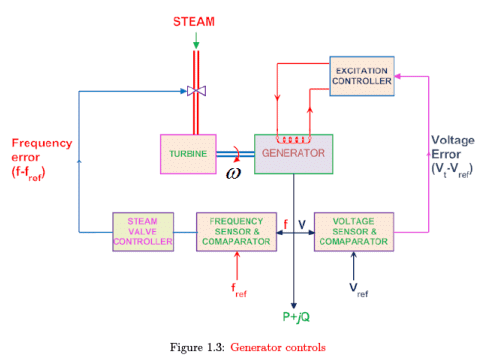
The controls provided in generating units consist of prime mover control and excitation controls as shown in Fig. 1.3. The controls are also called as local frequency control (LFC) and automatic voltage control (AVC).
These controllers are set for a particular operating condition and maintain the frequency and voltage magnitude within the specified limits following small changes in load demand. If the input to the prime mover is constant, then an increase in the active power of load at the generator terminals results in a drop in the prime mover speed. This then, causes a reduction in the frequency. On the other hand, an increase in reactive power demand at the generator results in the reduction of terminal voltage, if the excitation (generation field current) is kept constant. As the time constant of excitation system is much smaller than that of prime mover system, the coupling between LFC and AVC loop is negligible and hence they are considered independently.
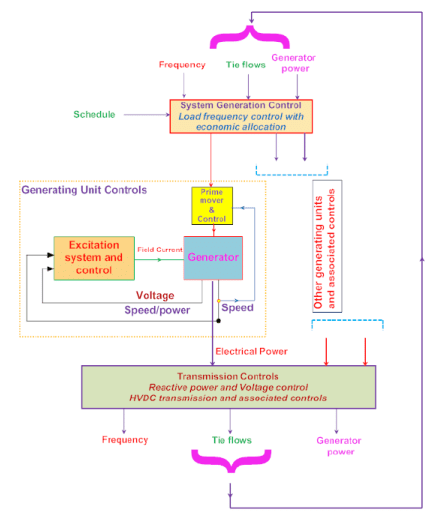
Figure 1.2: Controls in a Power System
Load frequency control
In LFC, two feedback loops namely, primary and secondary loops are provided. Both the loops help in maintaining the real power balance by adjusting the turbine input power. The primary LFC loop senses the generator speed and accordingly controls the turbine input. This is a faster loop and operates in the order of seconds. But this loop provides only a coarse frequency control. The secondary LFC loop which senses the system frequency and tie-time power, fine tunes the frequency back to the nominal value. This is a slower loop and may take minutes to eliminate frequency error.
Automatic voltage control
In AVC, the bus voltage is measured and compared to a reference. The resulting error voltage is then amplified and applied to the excitation control system. The output of the exciter controls the generator field current. An increase in the reactive power load of the generator causes the terminal voltage to decrease and this results in generation of voltage error signal. The amplified error signal then increases the exciter field current which in turn increases the exciter terminal voltage. This increases the generator field current, which results in an increase in the generated emf. The reactive power generation of the generator is thus increased and the terminal voltage is brought back to its nominal value.
The generation control maintains the active power balance in the system. It also controls the division of load active power between the generators in the system to ensure economic operation.
Economic dispatch
Economic operation and planning of electric energy generating system has been accorded due importance by the power system operators. Power systems need to be operated economically to make electrical energy cost-effective to the consumer and profitable for the operator. The operational economics that deals with power generation and delivery can be divided into two sub-problems.
One dealing with minimum cost of power generation and other dealing with delivery of power with minimum power loss. The problem of minimum production cost is solved using economic dispatch.
The main aim of economic dispatch problem is to minimize the total cost of generating real power at different plants in the system while maintaining the real power balance in the system.
For system having hydro-plants, a coordinated dispatch of hydro-thermal units is carried out. The economic dispatch and minimum loss problems can be solved by means of optimal power flow (OPF) method. The OPF calculations involve a sequence of load flow solutions in which certain controllable parameters are automatically adjusted to satisfy the network constraints while minimizing a specified objective function.
The power system control objectives are dependent on the operating state of the system. Under normal operating conditions, the controller tries to operate the system as economically as possible with voltages and frequency maintained close to nominal values.
But abnormal conditions like outage of a larger generator, of a major transmission line or sudden increase or reduction of system load can cause havoc in the system, if not properly controlled.
Different operating objectives have to be met in order to restore the system to normal operation after the occurrence of such contingencies.
Security analysis and contingency evaluation
For the analysis of power system security and development of approximate control systems, the system operating conditions are classified into five states: normal, alert, emergency, in extremis and restorative. The state and the transitions between them are shown in Fig. 1.4.
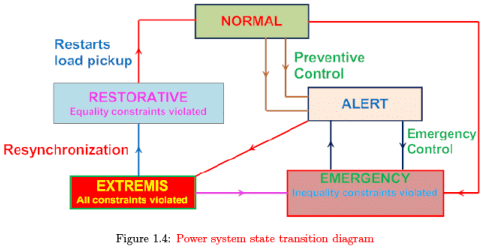
Normal state: In this state, all the system variables are within the normal range with no equipment being overloaded. The system is in a secure state with both ‘equality’ (total system generation eqauls total system load) and ‘inequality’(bus voltages and equipment currents within the limits) constraints being satisfied. In this state, a single contingency cannot disrupt the system security and cannot cause any variable to violate the limit. The system has adequate spinning reserve.
Alert state: If the security level of the system falls below some specified threshold, the system then enters the alert state and is termed as ‘insecure’. The system variables are still within limits.
This state may be brought about by a single contingency, large increase in system load or adverse weather conditions. Preventive control steps taken to restore generation or to eliminate disturbace can help in restoring the system to the normal state. If these restorative steps do not succeed, the system remains in the alert state. Occurence of a contingency with the system already in alert state, may cause overloading of equipments and the system may enter emergency state. If the disturbance is very severe, the system may enter into extremis state directly from alert state.
Emergency state: If the preventive controls fail or if a severe disturbance occurs, the system enters emergency state. The transition to this state can occur either from normal state or alert state. In this state the balance between generation and load is still maintained (equality constraints still satisfied) and the system remains in synchronism. Some components are however overloaded(some inequality constrints violated). Failure of these components results in system disintegration. Emergency control actions like disconnection of faulted section, re-routing of power excitation control, fast valving, and load curtailment have to be taken. It is most urgent that the system be restored to normal or alert state by means of these actions.
In-extremis state: If the emergency control actions fail when the system is in emergency state, then the system enters into in-extremis state. The system starts to disintegrate into sections or islands. Some of these islands may still have sufficient generation to meet the load. The components are overloaded and the active power balance is also disrupted. Overloaded generators start tripping leading to cascade outages and possible ‘blackout’. Control actions, such as load shedding and controlled system operation are taken to save as much of the system as possible from a widespread blackout.
Restorative state: The restorative state represents a condition in which control action is being taken to restart the tripped generators and restore the interconnections. The system transition can be either to normal or alert state depending on system conditions. The sequence of events that result in system transition from normal to in-extremis state may take from few seconds to several minutes. Bringing the system back to normal through the restorative state is an extremely time consuming process and may last for hours or may be days. A large generator may require many hours from restart to synchronization. The switched off loads can be picked up gradually and resynchronization of operating islands to the grids is also a time consuming process.
The control actions may be initiated from the central energy control centre either through operators or automatically.
Unit Commitment
The total load in the power system varies throughout a day and its value also changes with the day of the week and season. Hence, it is not economical to run all the units available all the time.
Thus, the problem of unit commitment is to determine in advance, the start and the shut down sequence of the available generators such that the load demand is met and the cost of generation is minimum.
Maintenance scheduling
Preventive maintenance has to be carried out on power system components to ensure that they continue to operate efficiently and reliably. Generators are usually put on maintenance once every year. Their maintenance has to be so scheduled such that the available generation is sufficient to meet the system load demand. The problem of maintenance scheduling deals with the sequencing of generator maintenance such that sufficient generation is always available to meet the load demand and the cost of maintenances and cost of lost generation is minimum.
System planning
To meet ever increasing load demand, either new power systems have to be built or the existing power systems are expanded by adding new generators and transmission lines. Many analyses must be performed to design and study the performance of the system and plan expansion. To study the system feasibility and performance, the following analyses need to be carried out:
(a) Load flow analysis
(b) Fault analysis/short circuit studies
(c) Stability studies
(d) Contingency analysis
Load flow analysis
The load flow analysis involves the steady state solution of the power system network to determine power flows and bus voltages of a transmission network for specified generation and loading conditions. These calculations are required for the study of steady state and dynamic performance of the system.
The system is assumed to be balanced and hence, single phase representation is used. These studies are important in planning and designing future expansion of power system and also in determining the best operation of the existing systems.
Fault studies
In these studies the line currents and bus voltages of a system are calculated during various types of faults. Faults on power system are divided into balanced and unbalanced faults. Three phase symmetrical faults are balanced faults in which the system retains its balanced nature. The unbalanced faults are single line to ground fault, line to line fault and double line to ground fault. The fault currents values are useful in relay setting and co-ordination as well as for selecting the proper rating of the circuit breakers.
Stability studies
The stability studies ascertain the impact of disturbances on the electrochemical dynamic behavior of the power system. These studies are of two types; small signal stability study and transient stability study.
The small signal stability studies deal with the behavior of a system following any small disturbances like small change in load, small change in AVR gain etc. As the disturbance is small, the equations that describe the dynamics of the power system are linearized for the purpose of analysis.
The system is small signal stable for a particular operating point, if following a small disturbance it returns to essentially the same steady state operating condition.
Transient stability study deals with the response of a power system subjected to a large disturbance such a short circuit, line tripping or loss of large genration. In this study the equations describing system dynamics are solved using numerical techniques. The power system transient stability problem is then defined as that of assessing whether or not the system will reach an acceptable steady state operating point following a large disturbance.
We will now start with the study of load flow analysis technique from the next lecture.
FAQs on Modern Power System Operation and Control, Different Types of Power System Analysis - Electrical Engineering (EE)
| 1. What is modern power system operation and control? |  |
| 2. What are the different types of power system analysis in electrical engineering? | |
| 3. How does load forecasting contribute to power system operation and control? | |
| 4. What is economic dispatch in power system operation and control? | |
| 5. How does voltage control play a role in power system operation and control? | |

|
1.9K Views |

|
4.70/5 Rating |

|
Dec 19, 2024 Last updated |

|
Explore Courses for Electrical Engineering (EE) exam
|
|
Important questions
,video lectures
,Previous Year Questions with Solutions
,shortcuts and tricks
,Different Types of Power System Analysis - Electrical Engineering (EE)
,Semester Notes
,Modern Power System Operation and Control
,Sample Paper
,Modern Power System Operation and Control
,ppt
,Different Types of Power System Analysis - Electrical Engineering (EE)
,Exam
,practice quizzes
,MCQs
,Different Types of Power System Analysis - Electrical Engineering (EE)
,mock tests for examination
,Extra Questions
,past year papers
,Viva Questions
,Summary
,Free
,study material
,Modern Power System Operation and Control
,Objective type Questions
;






Modern Power System Operation and Control, Different Types of Power System Analysis Free PDF Download
Importance of Modern Power System Operation and Control, Different Types of Power System Analysis
Modern Power System Operation and Control, Different Types of Power System Analysis Notes
Modern Power System Operation and Control, Different Types of Power System Analysis Electrical Engineering (EE) Questions
Study Modern Power System Operation and Control, Different Types of Power System Analysis on the App
|
© EduRev
|
Education Revolution
|



Follow Us
|




