Principle of Virtual Work for a System of Connected Rigid Body | Engineering Mechanics - Civil Engineering (CE) PDF Download
n degree of freedom systems
Having discussed single and two degree of freedom systems, and introduced the concept of generalised forces we can now consider the general case of an n degree of freedom system.
A virtual displacement must be consistent with the constraints on the system. The motion can be described by n independent, generalised co-ordinates, q1 q2 qn , ,...., . Hence a virtual displacement can be represented by small changes in these co-ordinates:-
Suppose only one co-ordinate, qi ( 1 ≤i ≤n) i 1 is given a small, imaginary displacement, . δ qi As a result every particle in the system will be, in general, displaced a certain amount. The virtual work done will be of the form δW = Qiδqi where Qi is an expression relating directly to the forces acting on the system. Qi is the generalised force associated with qi .
From the principle of virtual work
Since, δqi is finite, we get
Qi=0
This must be true for i = 1,2,...,n.
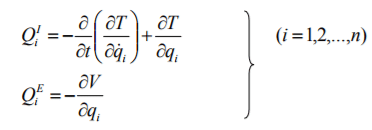
The generalised forces have component parts
1) inertial forces (mass x acceleration)
2) elastic or restraining forces
3) damping forces (energy dissipation)
4) external forces
5) constraint forces

(Noting, as before, that the constraint forces do no virtual work)
Then the equations of motion are:
These are the n equations of motion
We will examine each of these components now, in more detail. The aim is to relate these component forces to the generalised co-ordinates q1,q2...qn.
Inertial Forces (See also Handout)
The position of the ith particle of mass, in the system, is, in general, related to the n generalised co-ordinates, and time (if the constraints are independent of time) then the position of the ith particle depends only on the n generalised coordinates. Thus
 (1)
(1)
Now we suppose that the system is in motion and that we represent the inertial force on the ith particle (using D’Alembert’s Principle) as
 (2)
(2)
We now give the system an arbitrary virtual displacement – this can be
represented in terms of generalised co-ordinates by δq1 δq2 δqn , ,..., . The virtual displacement of the Ithparticle can be represented by
 (3)
(3)
and the virtual work done by the inertia force on the Ith particle is simply
 (4)
(4)
(note that this is a scalar product). From this result we get the total virtual work as
 (5)
(5)
Using equation (1) we have
 (6)
(6)
Hence
 (7)
(7)
and re-arranging
 (8)
(8)
However, the generalised inertial forces, Qj, are effectively defined by
 (9)
(9)
Comparing (8) and (9) we have
 (10)
(10)
It is shown in the handout notes that
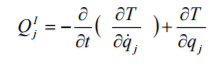 (11)
(11)
where T is the total KE
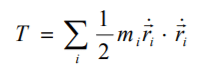 (12)
(12)
Elastic Forces
Consider a simple spring:
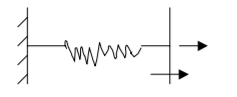
For static equilibrium
FE = FS
(external force) = (internal spring force)
Suppose we define the POTENTIAL ENERGY, V, as the work done by the external force to extend the spring a distance χ
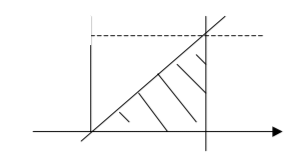
external work done =1/2kx2 = V
∴ V=f(x)=V(x)− a function of x
Here V=1/2kx2
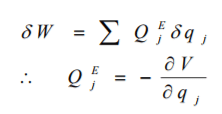
The work done by the internal spring force, W, is equal and opposite to V
Now consider a small, virtual displacement, δx . Corresponding changes to W and V are as follows:
Comparing with standard form
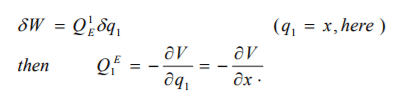
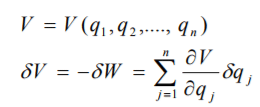
Generally
Compare with
Lagrange’s equation
Suppose that no damping forces are present, and there are no externally applied forces. Then

We have found that
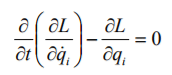
If we collect these results we get

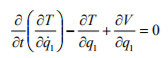
This is LAGRANGE’s EQUATION
If we define
L=T-V
And assume that V does not depend on the qi & ’s, then Lagrange’s equation can be written as:
Example 1- mass/spring system
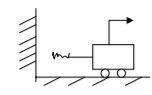
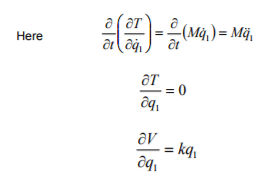
This is a single degree of freedom system. Here
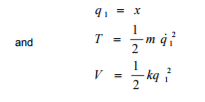
The Lagrange equation is (n=1 so only one equation)
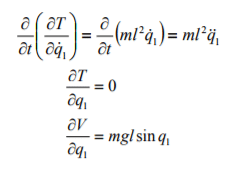
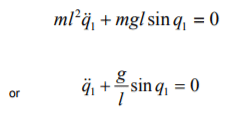
Example 2-simple pendulum
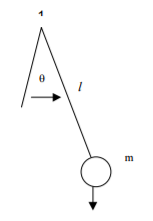

Hence
|
24 videos|59 docs|53 tests
|
FAQs on Principle of Virtual Work for a System of Connected Rigid Body - Engineering Mechanics - Civil Engineering (CE)
| 1. What is the principle of virtual work for a system of connected rigid bodies? |  |
| 2. How is the principle of virtual work applied to a system of connected rigid bodies? | |
| 3. What are the advantages of using the principle of virtual work for a system of connected rigid bodies? | |
| 4. Can the principle of virtual work be applied to non-rigid bodies or systems with deformable components? | |
| 5. Are there any limitations or assumptions associated with the principle of virtual work for a system of connected rigid bodies? | |

|
4.85/5 Rating |

|
Dec 18, 2024 Last updated |

|
Explore Courses for Civil Engineering (CE) exam
|
|
video lectures
,shortcuts and tricks
,past year papers
,Summary
,Important questions
,Previous Year Questions with Solutions
,MCQs
,Principle of Virtual Work for a System of Connected Rigid Body | Engineering Mechanics - Civil Engineering (CE)
,Exam
,mock tests for examination
,Extra Questions
,study material
,Semester Notes
,Principle of Virtual Work for a System of Connected Rigid Body | Engineering Mechanics - Civil Engineering (CE)
,Sample Paper
,Principle of Virtual Work for a System of Connected Rigid Body | Engineering Mechanics - Civil Engineering (CE)
,practice quizzes
,Viva Questions
,Free
,ppt
,Objective type Questions
;






Principle of Virtual Work for a System of Connected Rigid Body Free PDF Download
Importance of Principle of Virtual Work for a System of Connected Rigid Body
Principle of Virtual Work for a System of Connected Rigid Body Notes
Principle of Virtual Work for a System of Connected Rigid Body Civil Engineering (CE) Questions
Study Principle of Virtual Work for a System of Connected Rigid Body on the App
|
© EduRev
|
Education Revolution
|



Follow Us
|




