Properties of Z-Transform | Digital Signal Processing - Electronics and Communication Engineering (ECE) PDF Download

In this chapter, we will understand the basic properties of Z-transforms.
Linearity
It states that when two or more individual discrete signals are multiplied by constants, their respective Z-transforms will also be multiplied by the same constants.
Mathematically,

Proof − We know that,
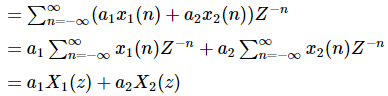 (Hence Proved)
(Hence Proved)
Here, the ROC is 
Time Shifting
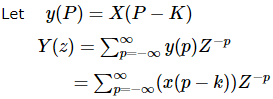
Time shifting property depicts how the change in the time domain in the discrete signal will affect the Z-domain, which can be written as;

Or 
Proof −
Let s = p-k
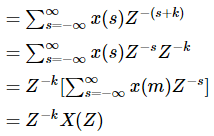 (Hence Proved)
(Hence Proved)
Here, ROC can be written as Z = 0 (p>0) or Z = ∞(p<0)
Example
U(n) and U(n-1) can be plotted as follows
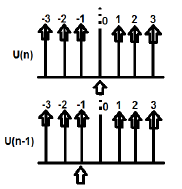
Z-transformation of U(n) cab be written as;
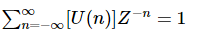
Z-transformation of U(n-1) can be written as;

So here  (Hence Proved)
(Hence Proved)
Time Scaling
Time Scaling property tells us, what will be the Z-domain of the signal when the time is scaled in its discrete form, which can be written as;

Proof −
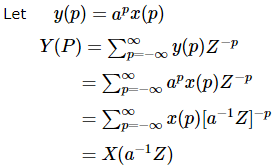 (Hence proved)
(Hence proved)
ROC: = Mod(ar1) < Mod(Z) < Mod(ar2) where Mod = Modulus
Example
Let us determine the Z-transformation of x(n) = ancosωn using Time scaling property.
Solution −
We already know that the Z-transformation of the signal cos(ωn)cos(ωn) is given by −

Now, applying Time scaling property, the Z-transformation of ancosωnancosωn can be written as;

Successive Differentiation
Successive Differentiation property shows that Z-transform will take place when we differentiate the discrete signal in time domain, with respect to time. This is shown as below.
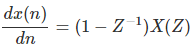
Proof −
Consider the LHS of the equation − 
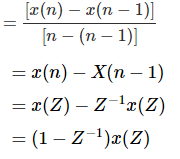 (Hence Proved)
(Hence Proved)
ROC: R1< Mod (Z) <R2
Example
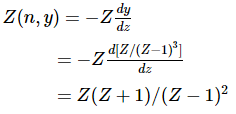
Let us find the Z-transform of a signal given by 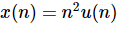
By property we can write
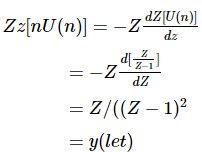
Now, Z[n.y] can be found out by again applying the property,
Convolution
This depicts the change in Z-domain of the system when a convolution takes place in the discrete signal form, which can be written as −

Proof −
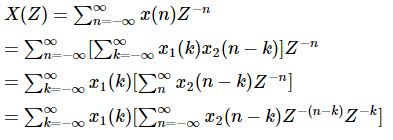
Let n-k = l, then the above equation cab be written as −
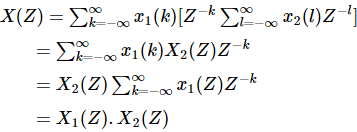 (Hence Proved)
(Hence Proved)
ROC : ROC ⋂ ROC2
Example
Let us find the convolution given by two signals
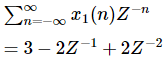
x1(n) = {3,−2,2} ...(eq. 1)
x2(n) = {2,0≤4 and 0 elsewhere} ...(eq. 2)
Z-transformation of the first equation can be written as;
Z-transformation of the second signal can be written as;
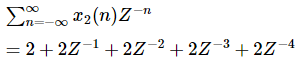
So, the convolution of the above two signals is given by −
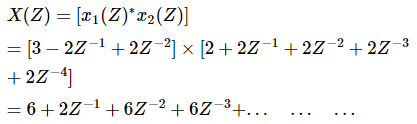
Taking the inverse Z-transformation we get,
x(n) = {6,2,6,6,6,0,4}
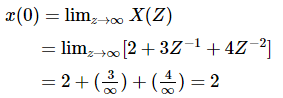
Initial Value Theorem
If x(n) is a causal sequence, which has its Z-transformation as X(z), then the initial value theorem can be written as;

Proof − We know that,

Expanding the above series, we get;

In the above case if Z → ∞ then Z−n→0 (Because n>0)
Therefore, we can say;
 (Hence Proved)
(Hence Proved)
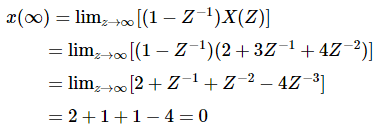
Final Value Theorem
Final Value Theorem states that if the Z-transform of a signal is represented as X(Z) and the poles are all inside the circle, then its final value is denoted as x(n) or X(∞) and can be written as −

Conditions −
- It is applicable only for causal systems.
- X(Z)(1−Z−1) should have poles inside the unit circle in Z-plane.
Proof − We know that

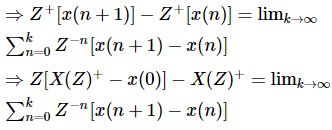
Here, we can apply advanced property of one-sided Z-Transformation. So, the above equation can be re-written as;

Now putting z = 1 in the above equation, we can expand the above equation −

This can be formulated as;
 (Hence Proved)
(Hence Proved)
Example
Let us find the Initial and Final value of x(n) whose signal is given by
X(Z) = 2 + 3Z−1 + 4Z−2
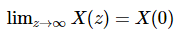
Solution − Let us first, find the initial value of the signal by applying the theorem
Now let us find the Final value of signal applying the theorem
Some other properties of Z-transform are listed below −
Differentiation in Frequency
It gives the change in Z-domain of the signal, when its discrete signal is differentiated with respect to time.
Its ROC can be written as;
Example
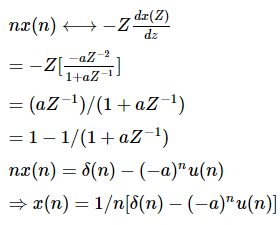
Let us find the value of x(n) through Differentiation in frequency, whose discrete signal in Z-domain is given by 
By property, we can write that
Multiplication in Time
It gives the change in Z-domain of the signal when multiplication takes place at discrete signal level.

Conjugation in Time
This depicts the representation of conjugated discrete signal in Z-domain.

|
3 videos|75 docs|54 tests
|
FAQs on Properties of Z-Transform - Digital Signal Processing - Electronics and Communication Engineering (ECE)
| 1. What is the Z-transform in electrical engineering? |  |
| 2. What are the properties of the Z-transform? | |
| 3. How is the Z-transform related to the Laplace transform? | |
| 4. What are the advantages of using the Z-transform in electrical engineering? | |
| 5. How is the inverse Z-transform calculated in electrical engineering? | |


Extra Questions
,Free
,past year papers
,Important questions
,Properties of Z-Transform | Digital Signal Processing - Electronics and Communication Engineering (ECE)
,Properties of Z-Transform | Digital Signal Processing - Electronics and Communication Engineering (ECE)
,Objective type Questions
,MCQs
,Summary
,ppt
,video lectures
,Semester Notes
,shortcuts and tricks
,Sample Paper
,study material
,Previous Year Questions with Solutions
,Viva Questions
,Exam
,Properties of Z-Transform | Digital Signal Processing - Electronics and Communication Engineering (ECE)
,mock tests for examination
,practice quizzes
;


Properties of Z-Transform Free PDF Download
Importance of Properties of Z-Transform
Properties of Z-Transform Notes
Properties of Z-Transform Electronics and Communication Engineering (ECE) Questions
Study Properties of Z-Transform on the App
|
© EduRev
|
Education Revolution
|



|






within 7 days!