Rolling Resistance | Engineering Mechanics - Civil Engineering (CE) PDF Download

Rolling Resistance
Deformation at the point of contact between a rolling wheel and its supporting surface introduces a resistance to rolling, which we mention only briefly. This resistance is not due to tangential friction forces and therefore is an entirely different phenomenon from that of dry friction.
To describe rolling resistance, we consider the wheel shown in Fig. 6/12 under the action of a load L on the axle and a force P applied at its center to produce rolling. The deformation of the wheel and supporting surfaces as shown is greatly exaggerated. The distribution of pressure p over the area of contact is similar to the distribution shown. The resultant R of this distribution acts at some point A and must pass through the wheel center for the wheel to be in equilibrium. We find the force P necessary to maintain rolling at constant speed by equating the moments of all forces about A to zero. This gives us
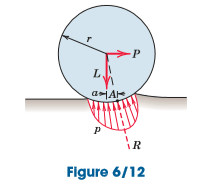
P=a/r L =μrL
where the moment arm of P is taken to be r. The ratio ur =a/r is called the coefficient of rolling resistance. This coefficient is the ratio of resisting force to normal force and thus is analogous to the coefficient of static or kinetic friction. On the other hand, there is no slippage or impending slippage in the interpretation of ur.
Because the dimension a depends on many factors which are difficult to quantify, a comprehensive theory of rolling resistance is not available. The distance a is a function of the elastic and plastic properties of the mating materials, the radius of the wheel, the speed of travel, and the roughness of the surfaces. Some tests indicate that a varies only slightly with wheel radius, and thus a is often taken to be independent of the rolling radius. Unfortunately, the quantity a has also been called the coefficient of rolling friction in some references. However, a has the dimension of length and therefore is not a dimensionless coefficient in the usual sense.
|
24 videos|69 docs|53 tests
|
FAQs on Rolling Resistance - Engineering Mechanics - Civil Engineering (CE)
| 1. What is rolling resistance? |  |
| 2. How does rolling resistance affect fuel efficiency? | |
| 3. What factors affect rolling resistance? | |
| 4. Can rolling resistance be reduced? | |
| 5. How does rolling resistance impact vehicle performance? | |



Rolling Resistance | Engineering Mechanics - Civil Engineering (CE)
,past year papers
,MCQs
,shortcuts and tricks
,study material
,Previous Year Questions with Solutions
,Viva Questions
,Extra Questions
,video lectures
,mock tests for examination
,Summary
,Exam
,practice quizzes
,ppt
,Free
,Sample Paper
,Objective type Questions
,Important questions
,Rolling Resistance | Engineering Mechanics - Civil Engineering (CE)
,Rolling Resistance | Engineering Mechanics - Civil Engineering (CE)
,Semester Notes
;


Rolling Resistance Free PDF Download
Importance of Rolling Resistance
Rolling Resistance Notes
Rolling Resistance Civil Engineering (CE) Questions
Study Rolling Resistance on the App
|
© EduRev
|
Education Revolution
|



|





