Serial Data Communication - 2 | Embedded Systems (Web) - Computer Science Engineering (CSE) PDF Download
Applications
This fits well in process control applications in which instructions are sent out to many actuators or responders. Ground voltage differences can occur in electrically noisy environments where heavy electrical machinery is operating
RS-485
This is an improved RS-422 with the capability of connecting a number of devices (transceivers) on one serial bus to form a network.
The Standard
Maximum Bit Transfer Rate, Signal Voltages and Cable Length • Such a network can have a "daisy chain" topology where each device is connected to two other devices except for the devices on the ends.
• Only one device may drive data onto the bus at a time. The standard does not specify the rules for deciding who transmits and when on such a network. That solely depends upon the system designer to define.
• Variable data rates are available for this standards but the standard max. data rate is 10 Mbps, however ,some manufacturers do offer up to double the standard range i.e. around 20 Mbps,but of course, it is at the expense of cable width.
• It can connect upto 32 drivers and receivers in fully differential mode similar to the RS – 422.
Communication Technique
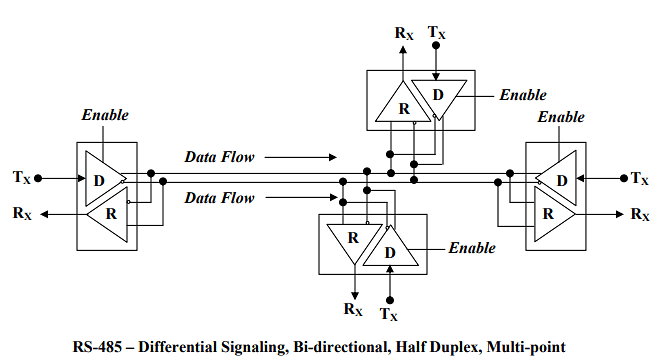
• EIA Recommended Standard 485 is designed to provide bi-directional half-duplex multi-point data communications over a single two-wire bus.
• Like RS-232 and RS-422, full-duplex operation is possible using a four-wire, two-bus network but the RS-485 transceiver ICs must have separate transmit and receive pins to accomplish this.
• RS-485 has the same distance and data rate specifications as RS-422 and uses differential signaling but, unlike RS-422, allows multiple drivers on the same bus. As depicted in the Figure below, each node on the bus can include both a driver and receiver forming a multi-point star network. Each driver at each node remains in a disabled highimpedance state until called upon to transmit. This is different than drivers made for RS422 where there is only one driver and it is always enabled and cannot be disabled. • With automatic repeaters and tri-state drivers the 32-node limit can be greatly exceeded. In fact, the ANSI-based SCSI-2 and SCSI-3 bus specifications use RS-485 for the physical (hardware) layer.
Advantages
• Among all of the asynchronous standards mentioned above this standard offers the maximum data rate.
• Apart from that special hardware for avoiding bus contention and ,
• A higher receiver input impedance with lower Driver load impedances are its other assets.
• Among all of the asynchronous standards mentioned above this standard offers the maximum data rate.
• Apart from that special hardware for avoiding bus contention and ,
• A higher receiver input impedance with lower Driver load impedances are its other assets.
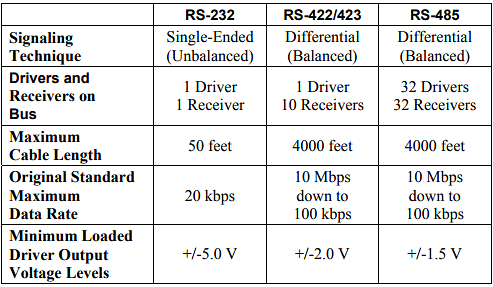
Differences between the various standards at a glance
All together the important electrical and mechanical characteristics for application purposes may be classified and summarized according to the table below.

Interfacing of Peripherals Involving the Rs-232 Asynchronous Communication Standards
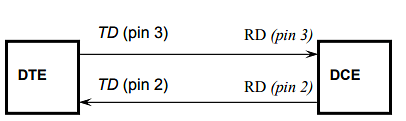
The RS-232 standard defines the two devices connected with a serial cable as the Data Terminal Equipment (DTE) and Data Circuit-Terminating Equipment (DCE). This terminology reflects the RS-232 origin as a standard for communication between a computer terminal and a modem. Primary communication is accomplished using three pins: the Transmit Data (TD) pin, the Receive Data(RD) pin, and the Ground pin (not shown). Other pins are available for data flow control. The serial port pins and the signal assignments for a typical asynchronous serial communication can be shown in the scheme for a 9-pin male connector (DB9) on the DTE as under:
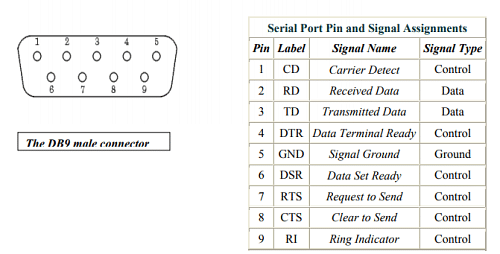
(The RS-232 standard can be referred for a description of the signals and pin assignments used for a 25-pin connector) Because RS-232 mainly involves connecting a DTE to a DCE, the pin assignments are defined such that straight-through cabling is used, where pin 1 is connected to pin 1, pin 2 is connected to pin 2, and so on. A DTE to DCE serial connection using the Transmit Data (TD) pin and the Receive Data (RD) pin is shown below.
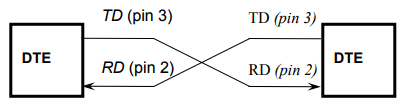
Connecting two DTE's or two DCE's using a straight serial cable, means that the TD pin on each device are connected to each other, and the RD pin on each device are connected to each other. Therefore, to connect two like devices, a null modem cable has to be used. As shown below, null modem cables crosses the transmit and receive lines in the cable.
Serial ports consist of two signal types: data signals and control signals. To support these signal types, as well as the signal ground, the RS-232 standard defines a 25-pin connection. However, most PC's and UNIX platforms use a 9-pin connection. In fact, only three pins are required for serial port communications: one for receiving data, one for transmitting data, and one for the signal ground.
Throughout this discussion computer is considered a DTE, while peripheral devices such as modems and printers are considered DCE's. Note that many scientific instruments function as DTE's.
The term "data set" is synonymous with "modem" or "device," while the term "data terminal" is synonymous with "computer."
(Detail PC – PC communication….)
The schematic for a connection between the PC UART port and the Modem serial port is as shown below:
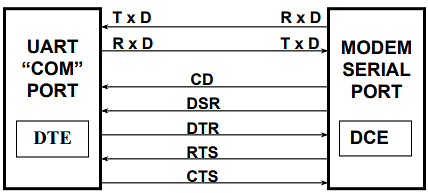
Note: The serial port pin and signal assignments are with respect to the DTE. For example, data is transmitted from the TD pin of the DTE to the RD pin of the DCE.
The Data Pins
Most serial port devices support full-duplex communication meaning that they can send and receive data at the same time. Therefore, separate pins are used for transmitting and receiving data. For these devices, the TD, RD, and GND pins are used. However, some types of serial port devices support only one-way or half-duplex communications. For these devices, only the TD and GND pins are used. In the course of explanation, it is assumed that a full-duplex serial port is connected to the DCE. The TD pin carries data transmitted by a DTE to a DCE. The RD pin carries data that is received by a DTE from a DCE.
The Control Pins
9-pin serial ports provide several control pins whose functions are to:
• Signal the presence of connected devices
• Control the flow of data The control pins include RTS and CTS, DTR and DSR, CD, and RI.
The RTS and CTS Pins
The RTS and CTS pins are used to signal whether the devices are ready to send or receive data. This type of data flow control - called hardware handshaking - is used to prevent data loss during transmission. When enabled for both the DTE and DCE, hardware handshaking using RTS and CTS follows these steps:
1. The DTE asserts the RTS pin to instruct the DCE that it is ready to receive data.
2. The DCE asserts the CTS pin indicating that it is clear to send data over the TD pin. If data can no longer be sent, the CTS pin is unasserted.
3. The data is transmitted to the DTE over the TD pin. If data can no longer be accepted, the RTS pin is unasserted by the DTE and the data transmission is stopped.
The DTR and DSR Pins Many devices use the DSR and DTR pins to signal if they are connected and powered. Signaling the presence of connected devices using DTR and DSR follows these steps:
1. The DTE asserts the DTR pin to request that the DCE connect to the communication line.
2. The DCE asserts the DSR pin to indicate it's connected.
3. DCE unasserts the DSR pin when it's disconnected from the communication line.
The DTR and DSR pins were originally designed to provide an alternative method of hardware handshaking. However, the RTS and CTS pins are usually used in this way, and not the DSR and DTR pins. However, you should refer to your device documentation to determine its specific pin behavior.
The CD and RI Pins The CD and RI pins are typically used to indicate the presence of certain signals during modemmodem connections.
CD is used by a modem to signal that it has made a connection with another modem, or has detected a carrier tone. CD is asserted when the DCE is receiving a signal of a suitable frequency.
CD is unasserted if the DCE is not receiving a suitable signal. RI is used to indicate the presence of an audible ringing signal. RI is asserted when the DCE is receiving a ringing signal. RI is unasserted when the DCE is not receiving a ringing signal (for example, it's between rings).
A Practical Example: PC-PC Communication
PROBLEM: Suppose one PC needs to send data to another computer located far away from its vicinity. Now, the actual data is in the parallel form, it needs to be converted into its serial counterpart. This is done by a Parallel-in-Serial-out Shift register and a Serial-in-Parallel-out Shift register (some electronic component).
It has to be made sure that the transmitter must not send the data at a rate faster than with which the receiver can receive it. This is done by introducing some handshaking signals or circuitry in conjugation with the actual system.
For very short distances, devices like UART(Universal Asynchronous Receiver Transmitter: IN8250 from National Semiconductors Corporation) and USART (Universal Synchronous Asynchronous Receiver Transmitter; Intel 8251A from Intel Corporation.) incorporate the essential circuitry for handling this serial communication with handshaking. For long distances Telephone lines (switched lines) are more practically feasible because of there pre-availability. ONE COMPLICATION: …BANDWIDTH is only 300 – 3000Hz.
REMEDY: Convert the digital signal to audio tones. The device, which is used to do this conversion and vice-versa, is known as a MODEM.
But how all the above Principles are Applied in Practice?
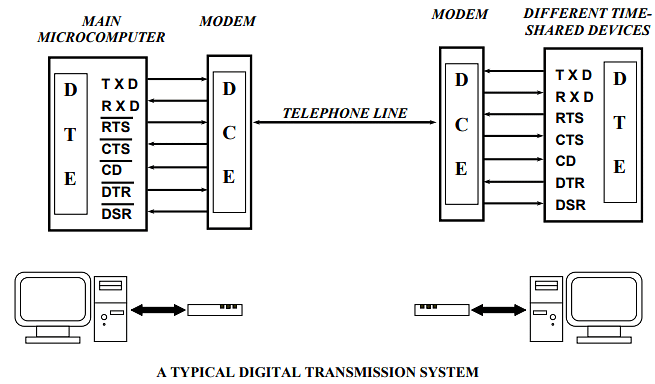
Consider the control room of a steel plant where one main computer is time-sharing and communicating data to and fro with some other computers or I/O modules in a DCS or SCADA hierarchy.
In the simplest way the communication hardware-software can be represented in a top-level block diagram as follows:
Overall Procedure of Communication………………………
(Note: This is actually the initialization and handshaking description for a typical UART, the Intel 8251A)…… (for more details click the box here )
To start with, it should be mentioned that the signals alongside the arrowheads represent the minimum number of necessary signals for the execution of a typical communication standard or a protocol; being elaborated later. These signals occur when the main control terminal wants to send some control signal to the end device or if the end device wants to send some data, say an alarm or some process output, to the main controller.
Both the main microcomputer and the end-device or the time-shared device can be referred to as terminals.
Whenever a terminal is switched on it first performs a self-diagnostic test, in which it checks itself and if it finds that its integrity is fully justified it asserts the DTR (data-terminal ready) signal low. As the modem senses it getting low, it understands that the terminal is ready.
The modem then “replies” the terminal by asserting DSR (data-set ready) signal low. Here the direction of the arrows is of prime importance and must be remembered to get the full understandability of the whole procedure.
If the terminal is actually having some valuable data to convey to the end-terminal it will assert the RTS (request-to-send) signal low back to the modem and, in turn, the modem will assert the CD (carrier-detect) signal to the terminal indicating as if now it has justified the connection with the terminal computer.
But it may be possible that the modem may not be fully ready to transmit the actual data to the telephone, this may be because of its buffer saturation and several other reasons. When the modem is fully ready to send the data along the telephone line it will assert the CTS (Clear-tosend) signal back to the terminal.
The terminal then starts sending the serial data to the modem and the modem. When the terminal gets exhausted of the data it asserts the RTS signal low indicating the modem that it has not got any more data to be sent. The modem in turn unasserts its CTS signal and stops transmitting.
The same way initialization and the handshaking processes are executed at the other end. Therefore, it must be noted here that the very important aspect of data communication is the definition of the handshaking signals defined for transferring serial data to and from the modem.
Current loops
Current loops are a standard, which are used widely in process automation. 20 mA are wirely used for transmitting serial communication data to programmable process controlling devices. Other widely used standard is 4-20mA current loop, which is used for transmitting analogue measurement signals between the sensor and measurement device.
Serial communication using current loop
In digital communications 20 mA current loop is a standard. The transmitters will only source 20 mA and the receiver will only sink 20 mA. Current loops often use opto-couplers. Here it is the current which matters and not the voltages. For measurement purposes a small resistance, say of value1k, is connected in series with the receiver/transmitter and the current meter. The current flowing into the receiver indicates the scaled data, which is actually going inside it. The data transmitted though this kind of interface is usually a standard RS-232 signal just converted to current pulses. Current “on” and “off” the transmission line depends on how the RS-232 circuit distinguishes between the value of currents and in what way it interprets the logic state thus obtained.
4-20 mA current loop
4-20 mA current loop interface is the standard for almost all the process control instruments. This interface works as follows. The sensor is connected to a process controlling equipment, which reads the sensor value and supplies a voltage to the loop where the sensor is connected and reads the amount of current it takes. The typical supply voltage for this arrangement is around 12-24 Volts through a resistor and the measured output is the voltage drop across that resistor converted into its current counterpart. The current loop is designed so that a sensor takes 4 mA current when it is at its minimum value and 20 mA when it is in its maximum value. Because the sensor will always pass at least 4 mA current and there is usually a voltage drop of many volts over the sensor, many sensor types can be made to be powered from only that loop current.
|
47 videos|69 docs|65 tests
|

|
4.90/5 Rating |

|
Nov 24, 2024 Last updated |

|
Explore Courses for Computer Science Engineering (CSE) exam
|
|
Serial Data Communication - 2 | Embedded Systems (Web) - Computer Science Engineering (CSE)
,study material
,Free
,Viva Questions
,ppt
,past year papers
,practice quizzes
,Previous Year Questions with Solutions
,Serial Data Communication - 2 | Embedded Systems (Web) - Computer Science Engineering (CSE)
,Objective type Questions
,Summary
,Important questions
,MCQs
,Serial Data Communication - 2 | Embedded Systems (Web) - Computer Science Engineering (CSE)
,Sample Paper
,Semester Notes
,mock tests for examination
,shortcuts and tricks
,Exam
,Extra Questions
,video lectures
;






Serial Data Communication - 2 Free PDF Download
Importance of Serial Data Communication - 2
Serial Data Communication - 2 Notes
Serial Data Communication - 2 Computer Science Engineering (CSE) Questions
Study Serial Data Communication - 2 on the App
|
© EduRev
|
Education Revolution
|



Follow Us
|