Study Notes For Synchronous Machines - 1 | Electrical Engineering SSC JE (Technical) - Electrical Engineering (EE) PDF Download
| Table of contents |
|
| Synchronous Machines |
|
| Types of Synchronous Machines |
|
| Basic Operation of the Synchronous Machine |
|
| Apparent power and Power factor |
|
| Synchronous Machine Ratings |
|

Synchronous Machines
- A synchronous machine is a type of electrical device that changes energy from one form to another, using the speed of a rotating magnetic field. It needs alternating current (AC) to function.
- These machines are commonly used in power systems for tasks like generating power, adjusting power factors, and driving machinery at a steady speed.
- Most synchronous machines work with three-phase AC power, though there are some single-phase versions for specific uses.
 Example of Synchronous Machines
Example of Synchronous Machines
- Regardless of whether it's a generator or a motor, a synchronous machine always runs at a consistent speed known as synchronous speed. This speed can be calculated using a specific formula.

- Synchronous machines are of two types: the stationary field or the rotating DC magnetic field.
Stationary Field Synchronous Machine
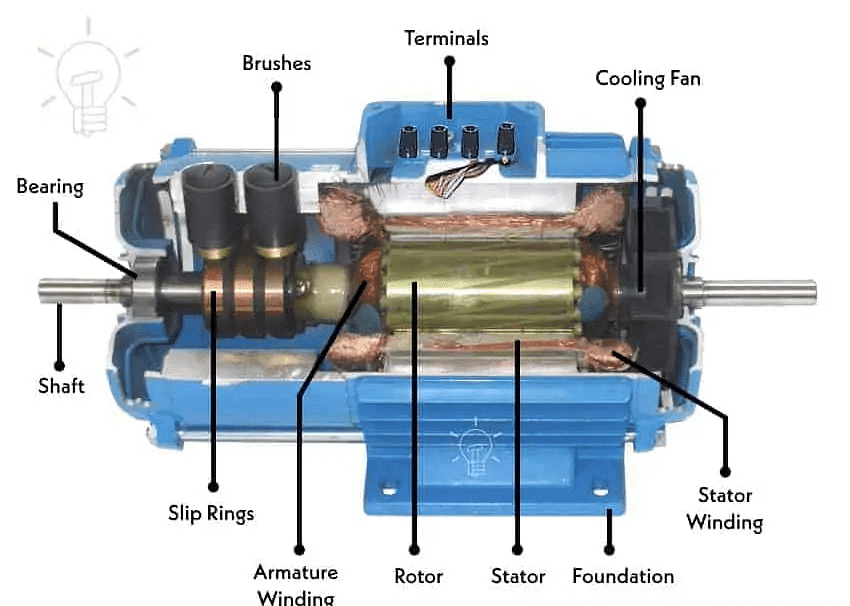
- The stationary field synchronous machine has salient poles mounted on the stator—the stationary member. The poles are magnetized either by permanent magnets or by a dc current.
- The armature, normally containing a three-phase winding, is mounted on the shaft. The armature winding is fed through three slip rings (collectors) and a set of brushes sliding on them. This arrangement can be found in machines up to about 5 kVA in rating.
Rotating Field Synchronous Machines
- For larger machines—the typical arrangement used is the rotating magnetic field. The rotating magnetic field (also known as revolving-field) synchronous machine has the field-winding wound on the rotating member (the rotor), and the armature wound on the stationary member (the stator).
- A dc current, creating a magnetic field that must be rotated at synchronous speed, energizes the rotating field-winding. The rotating field winding can be energized through a set of slip rings and brushes (external excitation), or from a diode-bridge mounted on the rotor (self-excited).
Synchronous Motor and Generator
- A synchronous generator is an electrical machine producing alternating emf (Electromotive force or voltage) of constant frequency.
- The synchronous motor operates at a precise synchronous speed and hence is a constant-speed motor. Unlike the induction motor, whose operation always involves a lagging power factor, the synchronous motor possesses a variable-power-factor characteristic and hence is suitable for power-factor correction applications.
- A synchronous motor operating without mechanical load is called a compensator. It behaves as a variable capacitor when the field is overexcited, and as a variable inductor when the field is under-excited. It is often used in critical positions in a power system for reactive power control.
Types of Synchronous Machines
According to the arrangement of the field and armature windings, synchronous machines may be classified as:
- Rotating-armature type
- Rotating-field type
Rotating-Armature Type
- The armature winding is on the rotor and the field system is on the stator.
- The generated current is brought out to the load via three (or four) slip-rings.
- Insulation problems, and the difficulty involved in transmitting large currents via the brushes, limit the maximum power output and the generated electromagnetic field (emf).
- This type is only used in small units, and its main application is as the main exciter in large alternators with brushless excitation systems.
Rotating Field Type
- The armature winding is on the stator and the field system is on the rotor.
- Field current is supplied from the exciter via two slip-rings, while the armature current is directly supplied to the load.
- This type is employed universally since very high power can be delivered.
- Unless otherwise stated, the subsequent discussion refers specifically to rotating-field type synchronous machines.
According to the shape of the field, synchronous machines may be classified as:
- Cylindrical-rotor (non-salient pole) machines and
- Salient-pole machines
Classification of Rotating Field Synchronus Machines
Cylindrical Rotor Machines
- The cylindrical-rotor construction is used in generators that operate at high speeds, such as steam-turbine generators (usually two-pole machines).
- This type of machine usually has a small diameter-to-length ratio, in order to avoid excessive mechanical stress on the rotor due to the large centrifugal forces.
Salient-pole machines
- The salient-pole construction is used in low-speed alternating current (AC) generators (such as hydro-turbine generators), and also in synchronous motors.
- This type of machine usually has a large number of poles for low-speed operation, and a large diameter-to-length ratio.
- The field coils are wound on the bodies of projecting poles.
- A damper winding (which is a partial squirrel-cage winding) is usually fitted in slots at the pole surface for synchronous motor starting and for improving the stability of the machine.
Basic Operation of the Synchronous Machine
- The following pictorial representation “Developed” view of a four-pole stator, shows the slots, the poles, and a section of the winding. The section shown is one of the three phases.
- It can be readily seen that the winding runs clockwise under a north pole, and counterclockwise under a south pole. This pattern repeats itself until the winding covers the four poles. A similar pattern is followed by the other two phases, but located at 120 electrical degrees apart.
 4 Pole Stator
4 Pole Stator
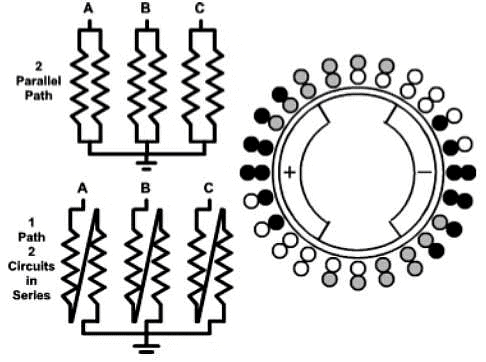
Schematic view of a two-pole generator with two possible winding configurations
- Two parallel circuits winding
- A two series connected circuits per phase.
- On the right, the three phases are indicated by different tones.
- Here we can see that some slots only have coils belonging to the same phase, while in others, coils belonging to two phases share the slot.
 Schematic View of Two-Pole Generator
Schematic View of Two-Pole Generator
No-Load Operation
- When the ideal machine is connected to an infinite bus, a three-phase balanced voltage (V1) is applied to the stator winding (within the context of this work, three-phase systems and machines are assumed).
- As described above, it can be shown that a three-phase balanced voltage applied to a three-phase winding evenly distributed around the core of an armature will produce a rotating (revolving) magneto-motive force (MMF) of constant magnitude (Fs). This MMF, acting upon the reluctance encountered along its path, results in the magnetic flux (φs) previously introduced.
- The speed at which this field revolves around the center of the machine is related to the supply frequency and the number of poles is NS called Synchronous Speed by the following expression
Ns = 120f/P
f = electrical frequency in Hz
P = number of poles of the machine
Ns = speed of the revolving field in revolutions per minute (rpm)
Phasor Diagrams of Cylindrical-Rotor Ideal Machine
- If no current is supplied to the dc field winding, no torque is generated, and the resultant flux (φr), which in this case equals the stator flux (φs), magnetizes the core to the extent the applied voltage (V1) is exactly opposed by a counter electromotive force (Cemf) (E1).
- If the rotor’s excitation is slightly increased, and no torque is applied to the shaft, the rotor provides some of the excitation required to produce (E1), causing an equivalent reduction of (φs). This situation represents the under-excited condition.
Motor Operation
- If a braking torque is applied to the shaft, the rotor starts falling behind the revolving-armature-induced magnetomotive force (MMF) (Fs).
- In order to maintain the required magnetizing MMF (Fr) the armature current changes.
- If the machine is in the under-excited mode, Figure (a) represents the new phasor diagram.
- On the other hand, if the machine is overexcited, the new phasor diagram is represented by Motor in Figure (b).
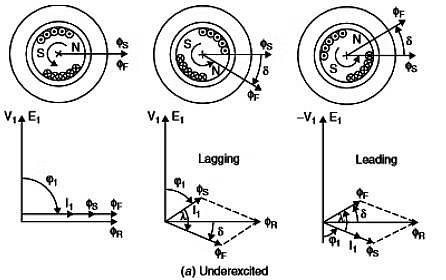 Phasor Diagram of Underexcited Synchronous Machine
Phasor Diagram of Underexcited Synchronous Machine
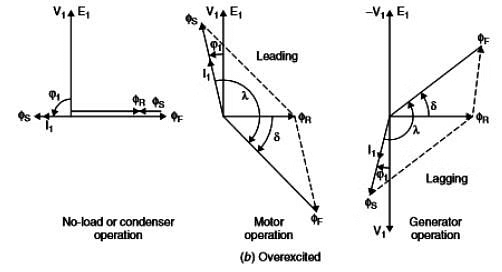 Phasor Diagram of Overexcited Synchronous Machine
Phasor Diagram of Overexcited Synchronous Machine
- The active power consumed from the network under these conditions is given by
Active power = V1 × I1 × cosϕ1 (per phase)
- If the braking torque is increased, a limit is reached in which the rotor cannot keep up with the revolving field. The machine then stalls. This is known as “falling out of step,” “pulling out of step,” or “slipping poles.” The maximum torque limit is reached when the angle δ equals π/2 electrical.
- The convention is to define δ as negative for motor operation and positive for generator operation. The torque is also a function of the magnitude of φr and φf. When overexcited, the value of φf is larger than in the under-excited condition.
- Therefore synchronous motors are capable of greater mechanical output when overexcited. Likewise, the under-excited operation is more prone to result in an “out-of-step” situation.
Generator Operation
- Let’s assume that the machine is running at no load and a positive torque is applied to the shaft; that is, the rotor flux angle is advanced ahead of the stator flux angle. As in the case of motor operation, the stator currents will change to create the new conditions of equilibrium.
- If the machine is initially underexcited, condition (a) in Figure.
- On the other hand, if the machine is overexcited, condition (b) in Figure.
- It is important to note that when “seen” from the terminals, with the machine operating in the underexcited mode, the power factor angle (ϕ1) is leading (i.e., I1 leads V1). This means the machine is absorbing reactive power from the system. The opposite occurs when the machine is in the overexcited mode.
- As for the motor operation, an overexcited condition in the generating mode also allows for greater power deliveries. As generators are normally called to provide VARs together with watts, they are almost always operated in the overexcited condition.
Apparent power and Power factor
Two factors limiting the power of electric machines are
- Mechanical torque on its shaft (usually, the shaft can handle much more torque)
- Heating of the machine’s winding.
The practical steady-state limits is set by heating in the windings. The maximum acceptable armature current sets the apparent power rating for a generator If the rated voltage is known, the maximum accepted armature current determines the apparent power rating of the generator
If the rated voltage is known, the maximum accepted armature current determines the apparent power rating of the generator The power factor of the armature current is irrelevant for heating the armature windings.
The power factor of the armature current is irrelevant for heating the armature windings.
Synchronous Machine Ratings
The purpose of ratings is to protect the machine from damage. Typical ratings of synchronous machines are voltage, speed, apparent power (kVA), power factor, field current and service factor.
- Voltage, Speed, and Frequency: The rated frequency of a synchronous machine depends on the power system to which it is connected. The commonly used frequencies are 50 Hz (Europe, Asia), 60 Hz (Americas), and 400 Hz (special applications: aircraft, spacecraft, etc.). Once the operation frequency is determined, only one rotational speed in possible for the given number of poles.
 The change in frequency would change the speed. Since Ea = Kφω, the maximum allowed armature voltage changes when the frequency changes. Specifically, if a 60 Hz generator will be operating at 50 Hz, its operating voltage must be derated to 50/60 or 83.3 %.
The change in frequency would change the speed. Since Ea = Kφω, the maximum allowed armature voltage changes when the frequency changes. Specifically, if a 60 Hz generator will be operating at 50 Hz, its operating voltage must be derated to 50/60 or 83.3 %.
Synchronous Machine Temperature Rating
The maximum temperature rise that a machine can stand depends on the insulation class of its windings. The four standard insulation classes with they temperature ratings are:
- A – 60oC above the ambient temperature
- B – 80oC above the ambient temperature
- F – 105oC above the ambient temperature
- H – 125oC above the ambient temperature
The higher the insulation class of a given machine, the greater the power that can be drawn out of it without overheating its windings.
Note: Overheating is a serious problem and synchronous machines should not be overheated unless absolutely necessary. However, the power requirements of the machine are not always known exactly prior to its installation. Because of this, general-purpose machines usually have their service factor defined as the ratio of the actual maximum power of the machine to the rating on its plate. For instance, a machine with a service factor of 1.15 can actually be operated at 115% of the rated load indefinitely without harm.
|
23 videos|94 docs|42 tests
|
FAQs on Study Notes For Synchronous Machines - 1 - Electrical Engineering SSC JE (Technical) - Electrical Engineering (EE)
| 1. What are the types of synchronous machines? |  |
| 2. How do synchronous machines operate? | |
| 3. What is apparent power and power factor in synchronous machines? | |
| 4. What are the ratings of synchronous machines? | |
| 5. Can synchronous machines be used as both generators and motors? | |



video lectures
,Extra Questions
,Viva Questions
,Exam
,practice quizzes
,past year papers
,Previous Year Questions with Solutions
,study material
,Important questions
,Sample Paper
,Objective type Questions
,ppt
,shortcuts and tricks
,MCQs
,Free
,Study Notes For Synchronous Machines - 1 | Electrical Engineering SSC JE (Technical) - Electrical Engineering (EE)
,mock tests for examination
,Summary
,Semester Notes
,Study Notes For Synchronous Machines - 1 | Electrical Engineering SSC JE (Technical) - Electrical Engineering (EE)
,Study Notes For Synchronous Machines - 1 | Electrical Engineering SSC JE (Technical) - Electrical Engineering (EE)
;






Study Notes For Synchronous Machines - 1 Free PDF Download
Importance of Study Notes For Synchronous Machines - 1
Study Notes For Synchronous Machines - 1
Study Notes For Synchronous Machines - 1 Electrical Engineering (EE) Questions
Study Study Notes For Synchronous Machines - 1 on the App
|
© EduRev
|
Education Revolution
|



|





