Design of Helical Springs for Variable Load - 1 | Design of Machine Elements - Mechanical Engineering PDF Download
Design of helical spring for variable load
In the earlier lecture, we have learned about design of helical springs for static loads. In many applications, as for example in railway carriages or in automobile suspension systems the helical springs used are constantly under variable load. Hence, it is understood that whenever there is a variable load on a spring the design procedure should include the effect of stress variation in the spring wire. The methodology used is the modified Soderberg method. we have learnt about Soderberg method in earlier chapter, here, the necessary modifications applicable to helical spring design will be discussed.
In the case of a spring, whether it is a compression spring or an extension spring, reverse loading is not possible. For example, let us consider a compression spring placed between two plates. The spring under varying load can be compressed to some maximum value and at the most can return to zero compression state (in practice, some amount of initial compression is always present), otherwise, spring will loose contact with the plates and will get displace from its seat. Similar reason holds good for an extension spring, it will experience certain amount of extension and again return to at the most to zero extension state, but it will never go to compression zone. Due to varying load, the stress pattern which occurs in a spring with respect to time is shown in Fig.7.2.1. The load which causes such stress pattern is called repeated load. The spring materials, instead of testing under reversed bending, are tested under repeated torsion.
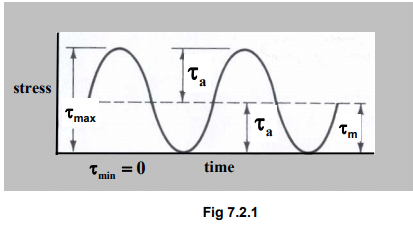
From Fig.7.2.1 we see that ,

Where, τa is known as the stress amplitude and τm is known as the mean stress or the average stress. We know that for varying stress, the material can withstand stress not exceeding endurance limit value. Hence, for repeated torsion experiment, the mean stress and the stress amplitude become,

Soderberg failure criterion
The modified Soderberg diagram for repeated stress is shown in the Fig 7.2.2.
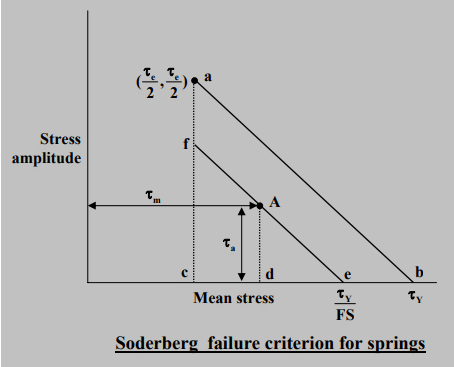
Fig 7.2.2
The stress being repeated in nature, the co-ordinate of the point a is , 2 2 e e τ τ . For safe design, the design data for the mean and average stresses, τa and τm respectively, should be below the line a-b. If we choose a value of factor of safety (FS), the line ab shifts to a newer position as shown in the figure. This line e-f in the figure is called a safe stress line and the point A ( , τm, τa ) is a typical safe design point.
Considering two similar triangles, abc and Aed respectively, a relationship between the stresses may be developed and is given as,Considering two similar triangles, abc and Aed respectively, a relationship between the stresses may be developed and is given as,
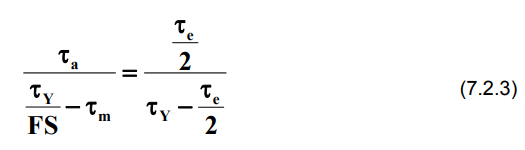
where τY is the shear yield point of the spring material.
In simplified form, the equation for Soderberg failure criterion for springs is

The above equation is further modified by considering the shear correction factor, Ks and Wahl correction factor, Kw. It is a normal practice to multiply τm by Ks and to multiply τa by Kw.

The above equation for Soderberg failure criterion for will be utilized for the designing of springs subjected to variable load.
Estimation of material strength
It is a very important aspect in any design to obtain correct material property. The best way is to perform an experiment with the specimen of desired material. Tensile test experiments as we know is relatively simple and less time consuming. This experiment is used to obtain yield strength and ultimate strength of any given material. However, tests to determine endurance limit is extremely time consuming. Hence, the ways to obtain material properties is to consult design data book or to use available relationships, developed through experiments, between various material properties. For the design of springs, we will discuss briefly, the steps normally used to obtain the material properties. One of the relationships to find out ultimate strength of a spring wire of diameter d is,

For some selected materials, which are commonly used in spring design, the values of As and ms are given in the table below.
As ms
Hard-drawn wire 1510 0.201
Oil-tempered wire 1610 0.193
Chrome-vanadium wire 1790 0.155
Chrome-silicon wire 1960 0.091
Music wire 2060 0.163
The above formula gives the value of ultimate stress in MPa for wire diameter in mm. Once the value of ultimate strength is estimated, the shear yield strength and shear endurance limit can be obtained from the following table developed through experiments for repeated load.
Wire Type 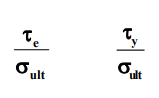
Hard-drawn wire 0.21 0.42
Oil-tempered wire 0.22 0.45
Chrome-vanadium wire 0.20 0.51
Chrome-silicon wire 0.20 0.51
Music wire 0.23 0.40
|302 SS wire 0.20 0.46
Hence, as a rough guideline and on a conservative side, values for shear yield point and shear endurance limit for major types of spring wires can be obtained from ultimate strength as,

With the knowledge of material properties and load requirements, one can easily utilize Soderberg equation to obtain spring design parameters.
Types of springs
There are mainly two types of helical springs, compression springs and extension springs. Here we will have a brief look at the types of springs and their nomenclature.
Compression springs
Following are the types of compression springs used in the design
(a) Plain ends
Total coils, NT : N
Solid length, LS : d ( NT + 1 )
Free length, L : LS + δ max + δallowan
Pitch, p : ( L – d ) / N
Plain end spring Fig 7.2.3
In the above nomenclature for the spring, N is the number of active coils, i.e., only these coils take part in the spring action. However, few other coils may be present due to manufacturing consideration, thus total number of coils, NT may vary from total number of active coils.
Solid length, LS is that length of the spring, when pressed, all the spring coils will clash with each other and will appear as a solid cylindrical body. The spring length under no load condition is the free length of a spring. Naturally, the length that we visualise in the above diagram is the free length.
Maximum amount of compression the spring can have is denoted as δmax, which is calculated from the design requirement. The addition of solid length and the δmax should be sufficient to get the free length of a spring. However, designers consider an additional length given as δ allowance. This allowance is provided to avoid clash between to consecutive spring coils. As a guideline, the value of δ allowance is generally 15% of δmax.
The concept of pitch in a spring is the same as that in a screw.
(b) Plain and Ground ends
Total coils, NT : N + 1
Solid length, LS : d ( NT )
Free length, LS + +δ max+δ allowance
Pitch, p : L / ( N + 1)
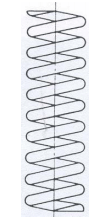
Plain and Ground end spring Fig 7.2.4
The top and bottom of the spring is grounded as seen in the figure. Here, due to grounding, one total coil is inactive.
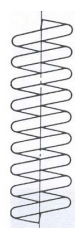
(c) Squared or closed ends
Total coils, NT : N + 2
Solid length, LS : d ( NT + 1 )
Free length, L : LS + δmax + δallowance
Pitch, p : ( L - 3d ) / N

Squared or closed end spring Fi g 7.2.5
In the Fig 7.2.5 it is observed that both the top as well as the bottom spring is being pressed to make it parallel to the ground instead of having a helix angle. Here, it is seen that two full coils are inactive.
(d) Squared and ground ends
Total coils, NT : N + 2
Solid length, LS : d ( NT )
Free length, L LS + δmax + δallowance
Pitch, p : ( L - 2d ) / N
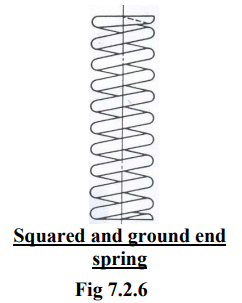
It is observed that both the top as well as the bottom spring, as earlier one, is being pressed to make it parallel to the ground, further the faces are grounded to allow for proper seat. Here also two full coils are inactive.
|
49 videos|70 docs|77 tests
|
FAQs on Design of Helical Springs for Variable Load - 1 - Design of Machine Elements - Mechanical Engineering
| 1. How do you design helical springs for variable load? |  |
| 2. What factors should be considered when designing helical springs for variable load? | |
| 3. How is the spring rate calculated for helical springs with variable load? | |
| 4. What is the significance of selecting the appropriate wire size and coil diameter for helical springs with variable load? | |
| 5. How can the fatigue life of helical springs for variable load be ensured? | |

|
4.88/5 Rating |

|
Dec 22, 2024 Last updated |

|
Explore Courses for Mechanical Engineering exam
|
|
Important questions
,Summary
,Previous Year Questions with Solutions
,Design of Helical Springs for Variable Load - 1 | Design of Machine Elements - Mechanical Engineering
,MCQs
,shortcuts and tricks
,Exam
,Extra Questions
,video lectures
,ppt
,Semester Notes
,Objective type Questions
,Design of Helical Springs for Variable Load - 1 | Design of Machine Elements - Mechanical Engineering
,mock tests for examination
,Viva Questions
,Sample Paper
,past year papers
,Design of Helical Springs for Variable Load - 1 | Design of Machine Elements - Mechanical Engineering
,Free
,study material
,practice quizzes
;






Design of Helical Springs for Variable Load - 1 Free PDF Download
Importance of Design of Helical Springs for Variable Load - 1
Design of Helical Springs for Variable Load - 1 Notes
Design of Helical Springs for Variable Load - 1 Mechanical Engineering Questions
Study Design of Helical Springs for Variable Load - 1 on the App
|
© EduRev
|
Education Revolution
|



|




