Dry Friction


Frictional force - basic concept
When two solid surfaces come into contact, each surface exerts forces on the other. The component of the contact force that acts tangent to the surfaces is called the frictional force. Friction opposes relative motion (or impending relative motion) of the surfaces.
Frictional behaviour is commonly classified into two idealised types:
- Static friction - when the contacting surfaces do not move relative to each other.
- Kinetic friction (also called dynamic or sliding friction) - when the contacting surfaces are sliding relative to each other.
Static friction
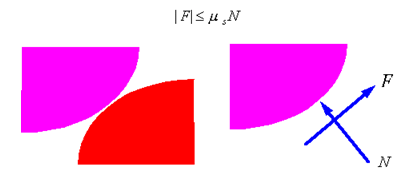
The static frictional force F is the tangential force that prevents relative motion up to a limiting value. The static friction satisfies the inequality
F ≤ μs N
where N is the normal reaction (normal force) between the surfaces and μs is the coefficient of static friction. The static frictional force can take any value from zero up to this limit depending on the applied tangential load and the state of equilibrium.
At the instant of impending motion (just before sliding), static friction reaches its maximum value and the equality holds:
F = μs N
The direction of static friction is opposite to the direction of the impending relative motion of the surfaces.
The angle whose tangent equals the coefficient of static friction is called the angle of friction φ, so that
tan φ = μs
Kinetic friction
When surfaces slide past each other, the frictional force is approximately proportional to the normal force and is given by
F = μk N
where μk is the coefficient of kinetic friction. The kinetic coefficient is usually less than the static coefficient (μk < μs), which explains why it is generally harder to start motion than to keep it going.
The kinetic frictional force acts opposite to the direction of relative motion of the surfaces and is usually modelled as independent of the sliding speed for moderate speeds in many engineering problems.
Factors affecting coefficients of friction
- Material pair and surface roughness (e.g., steel-steel, rubber-concrete).
- Surface contamination or lubrication (presence of oil, water, dust).
- Normal pressure and contact area distribution (in some cases μ varies with pressure).
- Temperature and wear.
- Relative speed (some materials show speed-dependent friction).
Pending (impending) motion
Pending or impending motion refers to the state just before relative sliding begins. In this state the static frictional force is at its limiting value and balances the applied tangential forces up to that limit. If the applied tangential force exceeds μsN, sliding begins and kinetic friction governs the motion.
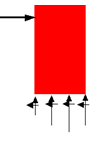
Tipping and sliding - comparison and determination
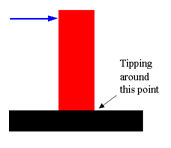
An object in contact with a surface may either slide or tip (rotate about an edge or corner) when subjected to forces and moments. Whether sliding or tipping occurs first depends on the applied force locations, the geometry of contact, and the frictional resistance.
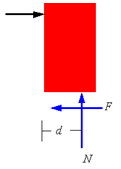
If an object begins to tip, it rotates about a pivot point on the contact region. At the instant of tipping, the resultant normal and frictional forces act at that pivot point. If tipping occurs before sliding, equilibrium of forces and moments about the pivot point yields the frictional force and normal reaction needed for equilibrium.
Procedure to decide tipping versus sliding
- Compute the horizontal force required to cause sliding by using the maximum available friction: set applied horizontal force = μsN and solve for the applied force.
- Compute the moment about the edge or point where tipping would occur and find the force or load that makes the normal reaction at the opposite edge zero (this gives the tipping condition).
- Compare the computed values: if the load causing tipping is reached before the sliding load, the body tips; otherwise it slides.
Location of the resultant normal force for surface contact
When contact is over a finite surface (area or line) rather than a point, the normal pressure is distributed over the contact zone. The resultant normal force is the integral (resultant) of that pressure distribution and generally does not act at the geometric centre unless the pressure distribution is symmetric.
The position of the resultant normal reaction is found from equilibrium of moments - the resultant must produce zero net moment about any point for translational equilibrium to hold. For simple pressure distributions, the resultant location can be obtained from the first moment of the pressure distribution.
Practical notes on resultant location
- For uniform pressure over a rectangular contact, the resultant acts through the centroid (geometric centre) of the contact area.
- If an eccentric load is applied on the body, the normal resultant shifts towards the loaded side; if it moves to the edge, the contact pressure at the far edge becomes zero and local tipping may occur.
- For combined normal and tangential loading, the resultant reaction lies within a friction cone whose half-angle is the angle of friction φ = tan-1(μs). If the resultant reaction leaves the cone, slipping or separation occurs.
Simple worked example
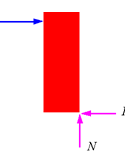
Example. A block of weight W rests on a horizontal rough surface. A horizontal force P is applied. Determine the value of P that will cause the block to begin to slide if the coefficient of static friction is μs.
Sol.
The normal reaction is equal to the weight: N = W.
Sliding begins when the applied horizontal force equals the maximum static friction.
Therefore set P = μs N.
Substitute the normal reaction: P = μs W.
Thus the minimum horizontal force to initiate sliding is P = μs W.
Applications and engineering significance
- Design of foundations, retaining walls and base plates where sliding stability must be checked using μ and resultant normal locations.
- Brake design and tyre-road interaction where kinetic and static friction coefficients control stopping distances and traction.
- Machine elements (keys, couplings, clamps) where frictional holding capacity is required.
- Erosion and wear studies where frictional heating and surface degradation are important.
- Geotechnical engineering problems such as slope stability and bearing capacity where shear resistance at interfaces is modelled using friction.
Summary
Friction is a contact force tangent to surfaces that resists relative motion. Static friction prevents motion up to a limit given by F ≤ μs N, and at impending motion F = μs N. Kinetic friction during sliding is given by F = μk N, with μk < μs in most practical situations. Determination of whether a body will slide or tip depends on geometry, loading, and the distribution of normal pressure; the resultant normal location is found by equilibrium and affects both tipping and sliding behaviour.
FAQs on Dry Friction
| 1. What is dry friction? |  |
| 2. How is dry friction different from other types of friction? | |
| 3. What factors affect the magnitude of dry friction? | |
| 4. How can dry friction be minimized? | |
| 5. What are some real-life examples where dry friction plays a significant role? | |



