Network Communication | Embedded Systems (Web) - Computer Science Engineering (CSE) PDF Download
Instructional Objectives
After going through this lesson the student would be able to
• Describe the need and importance of networking in an embedded system
• List the commonly adopted network communication standards and explain their basic features
• Distinguish between the CAN Bus, Field Bus and other network communication standards for embedded applications
• Choose a particular network standard to suit an application
Questions & Answers
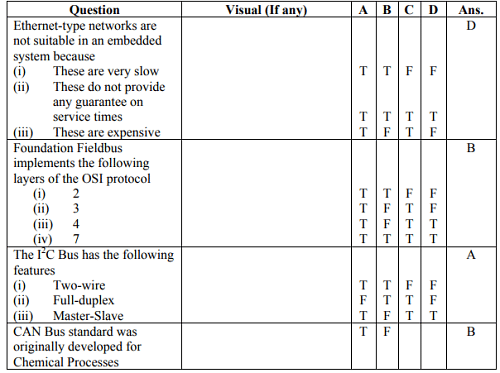
Network Communication
The role of networking in present-day data communication hardly needs any elaboration. The situation is also similar in the case of embedded systems, particularly those which are distributed over a larger geographical region – the so-called distributed embedded systems. Unfortunately, the most common network standard, namely the Ethernet, is not suitable for such distributed systems, especially when there are real-time constraints to be satisfied. This is due to the lack of any service time guarantee in the Ethernet standard. On the other hand, alternatives like Token Ring, which do provide a service-time guarantee, are not very suitable because of the requirement of a ring-type topology not very convenient to implement in the industrial environment.
The industry therefore proposed a standard called ‘Token-bus’ (and got it approved as the IEEE 802.5 specification) to cater to such requirements. However, the standard became too complex and inefficient as a result. Subsequently different manufacturers have come up with their own standards, which are being implemented in specific applications.
In this lesson we learn about three such standards, namely
►I 2 C Bus
► Field Bus
► CAN Bus
We discuss about the last one in a little more detail because it is slowly emerging as one of the most popular networking standards for many embedded applications, like Home Appliances, Automobiles, Ships, Vending Machines, Medical Equipment, small-scale industries etc.
The I2 C (Inter-Integrated Circuit) Bus Standard
This standard was introduced by Philips primarily to connect a number of integrated circuits using a single serial communication link. It uses a two-wire serial protocol. One of these carries the Data while the other carries the clock. As shown in the figure below, one of the Integrated Circuits (IC-1 in this case) is configured as the master while all the others are configured as slaves. Usually a microprocessor or a microcontroller serves as the master. The Protocol does not limit the number of masters but only master devices can initiate a data transfer. Both master and Servant devices can act as the senders or receivers of data. Normally, all servant devices go into high impedance state while the master maintains logic high.
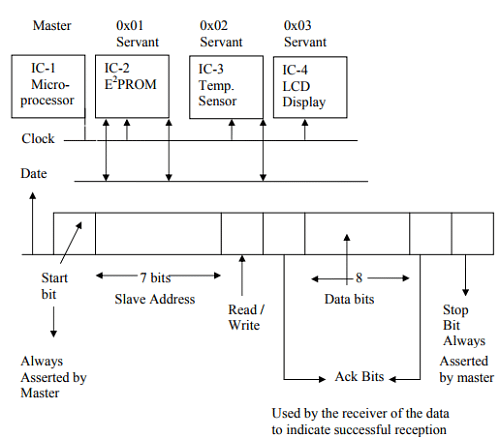
The original specifications for this standards were quite low, namely, 100 kbps with 7 bit addressing. The recent specifications have raised the data rate to 3.4 Mbps with 10 bit addressing.
The Field Bus
The Fieldbus comprises several versions of which, the PROFI (Process Field)-BUS is the standard for local area network for integrated communications from the field level to the cell level. It enables large numbers of field devices to be networked, and carries signals from the distributed I/Os to the programmable controller, which might be several kilometers distant, in a matter of milliseconds.
With transmission rates of up to 12 Mbit/s, PROFIBUS-DP, the high-speed fieldbus for distributed I/O, guarantees very short response times. Through the increase of the transmission rate to 12 Mbit/s, the LAN execution time has become irrelevant. There are no bottlenecks in data transmission. Short response times can be achieved even over large distances - with copper conductors up to 9600 meters between the PLC and its remote I/O, and no less than 23 km using fibere optic conductors. The fieldbus consists of a single two-conductor (copper) cable or a thin fiber optic conductor. Up to 125 nodes can be networked (up to 32 per LAN segment).
Initiatives such as the Interoperable Systems Project (ISP) from manufacturers under the leadership of Siemens, Fisher-Rosement and Yokagawa, or its counterpart, the WorldFIP, mainly supported by Honeywell, wanted to establish a de-facto Fieldbus standard by introducing their products onto the market. Both organisations merged in the Fieldbus Foundation (FF). This foundation strives to get a single world standard worked out. Industrial applications range from pulp and paper production and wastewater treatment right through to power station technology.
PROFIBUS operations are processed by standard telegrams passing between master and slave using predefined channels called communication relations. Data is stored as objects which can be addressed in the object directory via an index. PROFIBUS specifies an RS 485 interface with a baud rate of 9.6 kbit/s over a cable length of 1200 m and up to 500 kbit/s over a cable length of 200 m. Telegrams consist of communication relations of the target device, the PROFIBUS partner address as well as the indices of the object to be addressed along with any data. With the exception of broadcasts, all telegrams are answered with a positive or negative acknowledgement. This ensures rapid recognition of faulty or non-existent stations.
Transmission technology
(Physical Layer) of the PROFIBUS-PA can be characterized as follows:
► Digital, synchronous bit data transmission.
►Data rate 31.25 kbit/s.
► Manchester coding.
► Signal transmission and remote power supply with transposed two-wire cabling (screened/unscreened).
► Remote power supply DC voltage 9V...32V. o Signal AC voltage 0.75 Vpp...1 Vpp (send voltage).
► Line and tree topology.
► Up to 1.9 km total cabling.
► Up to 32 members per cable segment.
► Can be expanded with maximum four repeaters.
The FOUNDATION fieldbus model is based on the IEC Open Systems Interconnect (OSI) layered communication model.
The Physical layer
The fieldbus physical layer is OSI layer 1. Layer 1 receives encoded messages from the upper layers and converts the messages to physical signals on the fieldbus transmission medium. Physical layer requirements are defined by the approved IEC 1158-2 and ISA S50.02-1992 Physical Layer Standards. Communications rates supported are 31.25 kbit/s, 1.0 Mbit/s and 2.5 Mbit/s. The fieldbus physical layer operating at 31.25 kbit/s is intended to replace the 4-20 mA analog standard currently used to connect field devices to control systems. Like the 4-20 mA standard, the FOUNDATION fieldbus supports single wire pair operation, bus powered devices, and intrinsic safety options.
Fieldbus has additional advantages over 4-20 mA because many devices can connect to a single wire pair resulting in significant savings in wiring costs.
Communication stack
The communications stack comprises OSI Layers 2 and 7. The FOUNDATION fieldbus does not use the OSI layers 3, 4, 5 and 6 because the functions of these layers are not needed. Instead of these layers, the Fieldbus Access Sublayer (FAS) is used to map layer 7 directly to layer 2.
Layer 2, the Data Link Layer (DLL), controls transmission of messages onto the fieldbus. The DDL manages access to the fieldbus through a deterministic centralised bus scheduler called the Link Active Scheduler (LAS).
A fieldbus may have multiple Link Masters. If the current LAS fails, one of the Link Masters will become the LAS and the operation of the FOUNDATION fieldbus will continue. The FOUNDATION fieldbus is designed to "fail operational".
The DLL is a subset of the emerging ISA/IEC DLL standards committee work. The Fieldbus Message Specification (FMS) is modeled after the OSI layer 7 Application Layer. FMS provides the communications services needed by the User Layer for remote access of data across the fieldbus network.
User Layer
The User Layer is not defined by the OSI model. However, for the first time, the FOUNDATION fieldbus specification defines a complete user layer based on function blocks. Function blocks provide the elements necessary for manufacturers to construct interoperable instruments and controllers.
Device descriptions
Each fieldbus device is described by a device description (DD) written in a special programming language known as Device Description Language (DDL). The DD can be thought of as a "driver" for the device. The DD provides all of the information needed for a control system or host to interpret communications coming from the device, including configuration, and diagnostic information. Any control system or host can communicate with a device if it "knows" the DD for the device. The host device uses an interpreter called Device Description Services (DDS) to read the DD for the device. New FOUNDATION fieldbus devices can be added to the fieldbus at any time by simply connecting the device to the fieldbus wire and providing the control system or host can read the identification of the fieldbus device, including the DD identifier, over the fieldbus. Once the DD identifier is is known, the host reads the DD from a CDROM and supplies the DD to DDS for interpretation.
The completion of the technical specifications for an interoperable fieldbus system is a major milestone in the history of automation. The FOUNDATION fieldbus specification was developed by a consortium of instrument and control system manufacturers that represent over 90% of the instrumentation and control systems provided to end-users worldwide. The specifications will allow many manufacturers to deliver a wide range of interoperable fieldbus devices. These devices will usher in the next major technology transition in process and manufacturing automation.
The CAN Bus CAN was the solution developed by Robert Bosch GmbH, Germany in 1986 for the development of a communication system between three ECUs (electronic control units) in vehicles being designed by Mercedes. The UART, which had been in use for long, had been rendered unsuitable in their situation because of its point-to-point communication methodology. The need for a multi-master communication system became a stringent requirement. Intel then fabricated the first CAN in 1987.
Controller Area Network (CAN) is a very reliable and message-oriented serial network that was originally designed for the automotive industry, but has become a sought after bus in industrial automation as well as other applications. The CAN bus is primarily used in embedded systems, and is actually a network established among micro controllers. The main features are a two-wire, half duplex, high-speed network system mainly suited for high-speed applications using short messages. Its robustness, reliability and compatibility to the design issues in the semiconductor industry are some of the remarkable aspects of the CAN technology.
Main Features
► CAN can link up to 2032 devices (assuming one node with one identifier) on a single network. But accounting to the practical limitations of the hardware (transceivers), it may only link up to110 nodes (with 82C250, Philips) on a single network.
► It offers high-speed communication rate up to 1 Mbits/sec thus facilitating real-time control.
► It embodies unique error confinement and the error detection features making it more trustworthy and adaptable to a noise critical environment.
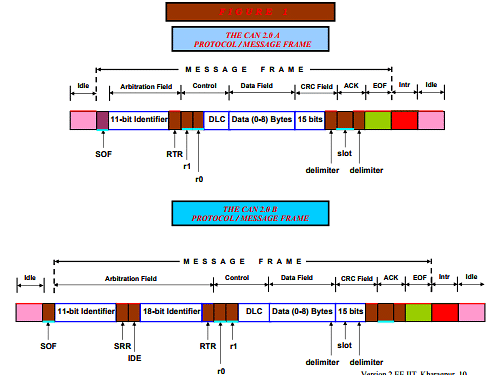
CAN Versions
Originally, Bosch provided the specifications. However the modern counterpart is designated as Version 2.0 of this specification, which is divided into two parts:
• Version 2.0A or Standard CAN; Using 11 bit identifiers.
• Version 2.0B or Extended CAN; Using 29 bit identifiers. The main aspect of these Versions is the formats of the MESSAGE FRAME; the main difference being the IDENTIFIER LENGTH.
CAN Standards
There are two ISO standards for CAN. The two differ in their physical layer descriptions.
► ISO 11898 handles high-speed applications up to 1Mbit/second.
► ISO 11519 can go upto an upper limit of 125kbit/second.
The Can Protocol/Message Formats
In a CAN system, data is transmitted and received using Message Frames. Message Frames carry data from any transmitting node to single or multiple receiving nodes.
CAN protocol can support two Message Frame formats: -
Version 2.0A - Standard CAN -
Version 2.0B - Extended CAN
Both formats can be overviewed from figure 1 below.
Main advantages are
► The protocol is highly reliable and error resistant.
► Has become a worldwide-accepted standard (framework) with the development of industrial and available embedded system applications like CANopen and DeviceNet. ► Embodies a MULTI-MASTER topology.
► Possess Sophisticated Error Detection and Handling Capability.
► Has High immunity to Electromagnetic Interference.
► Associated with, is a Short Latency time for High-Priority Message.
►The total number of Nodes is not limited by the protocol itself.
► Very easy Adaptation and entails flexible Extension and Modification features.
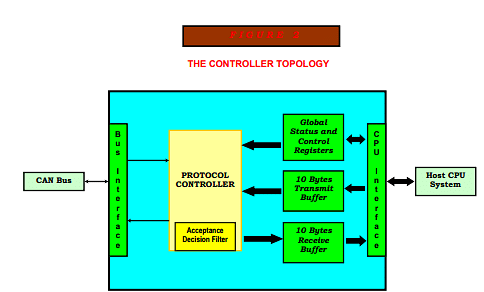
BASIC CAN Controller
The basic topology for the CAN Controller has been shown in figure 2 below. The basic controller involves FIFOs for message transfers and it has an enhanced counterpart in Full-CAN controller, which uses message BUFFERS instead
|
47 videos|69 docs|65 tests
|
FAQs on Network Communication - Embedded Systems (Web) - Computer Science Engineering (CSE)
| 1. What is network communication? |  |
| 2. What are the different types of network communication? | |
| 3. How does network communication work? | |
| 4. What are the advantages of network communication? | |
| 5. What are some common network communication protocols? | |

|
4.72/5 Rating |

|
Nov 24, 2024 Last updated |

|
Explore Courses for Computer Science Engineering (CSE) exam
|
|
Summary
,Network Communication | Embedded Systems (Web) - Computer Science Engineering (CSE)
,Important questions
,practice quizzes
,Previous Year Questions with Solutions
,Network Communication | Embedded Systems (Web) - Computer Science Engineering (CSE)
,ppt
,mock tests for examination
,Sample Paper
,Network Communication | Embedded Systems (Web) - Computer Science Engineering (CSE)
,past year papers
,Exam
,Viva Questions
,Semester Notes
,Free
,video lectures
,Objective type Questions
,MCQs
,Extra Questions
,shortcuts and tricks
,study material
;






Network Communication Free PDF Download
Importance of Network Communication
Network Communication Notes
Network Communication Computer Science Engineering (CSE) Questions
Study Network Communication on the App
|
© EduRev
|
Education Revolution
|



Follow Us
|