Question for GATE Past Year Questions: Kinematics of Mechanisms
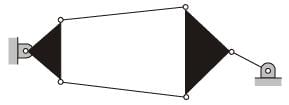
Try yourself:For the planar mechanism shown in figure select the most appropriate choice for the motion of link 2 when link 4 is moved upwards.
[1999]
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
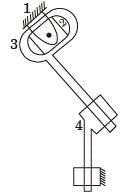
Try yourself:For the audio Cassette mechanism shown in figure given below where is the instantaneous centre of rotation (P) of the two spools?
[1999]
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
Try yourself:The number of inversions for a slider crank mechanism is
[2006]
Explanation
There are four number of inversions for a slider crank mechanism.
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
Try yourself:Match the items in columns I and II.
Column-I
P. Higher kinematic pair
Q. Lower kinematic pair
R. Quick return mechanism
S. Mobility of a linkage
Column-ll
1. Grubler's equation
2. Line contact
3. Euler's equation
4. Planer
5. Shaper
6. Surface contact
[2006]
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
Try yourself:Match the approaches given below to perform stated kinematics/dynamics analysis of machine.
Analysis
P. Continuous relative rotation
Q. Velocity and acceleration
R. Mobility
S. Dynamic - static analysis
Approach
1. D' Alembert's principle
2. Grubler's criterion
3. Grashof 's law
4. Kennedy's theorem
[2010]
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
Try yourself:Which of the following statements is INCORRECT?
[2010]
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
Try yourself:A planar closed kinematic chain is formed with rigid links PQ = 2.0 m, QR = 3.0 m, RS = 2.5 m and SP= 2.7 m with all revolute joints. The link to be fixed to obtain rocker (rocker-rocker) mechanism is
[2013]
Explanation
The link opposite to shortest link is fixed.
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
Try yourself:In a statically determinate plane truss, the number of joints (j) and the number of members (m) are related by
[2014]
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
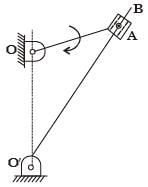
Try yourself:Figure shows a quick return mechanism. The cranks OA rotates clockwise uniformly. OA = 2 cm, OO' = 4 cm. The ratio of time for forward motion to that for return motion is
[1995]
Explanation
Ratio of time of forward motion to return motion
(Given OD = 2 cm, OO' = 4 cm, sin α = 2/4 = 0.5 ⇒ α = 30°)
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
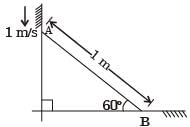
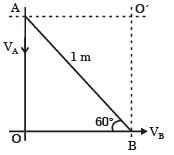
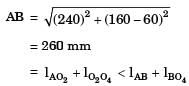
Try yourself:A rod of length 1 m is sliding in a corner as shown in figure. At an instant when the rod makes an angle of 60 degrees with the horizontal plane., the velocity of point A on the rod is 1m/ s. The angular velocity of the rod at this instant is
[1996]
Explanation
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
Try yourself:The mechanism used in a shaping machine is
[2003]
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
Try yourself:The lengths of the links of a 4-bar linkage with revolute pairs only are p, q, r and s units. Given that p < q< r< s. Which of these links should be the fixed one, for obtaining a "double crank" mechanism?
[2003]
Explanation
To obtain a “DOUBLE CRANK MECHANISM” shortest link is always fixed. While obtaining a “DOUBLE LEVER MECHANISM”, the link opposite to the “SHORTEST LINK” is fixed.
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
Try yourself:Match the following:
Type of Mechanism
P. Scott - Russel mechanism
Q. Geneva mechanism
R. Off-set slider-crank mechanism
S. Scotch Yoke mechanism
Question for GATE Past Year Questions: Kinematics of Mechanisms
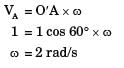
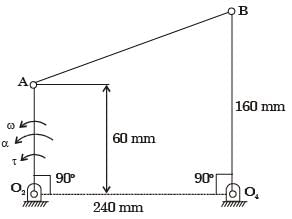
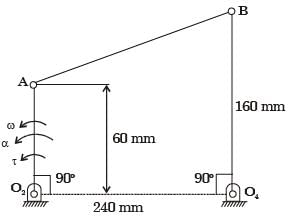
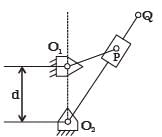
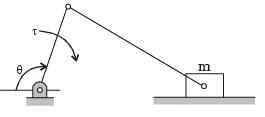
Try yourself:An instantaneous configuration of a four-bar mechanism, whose plane is horizontal, is shown in the figure below. At this instant, the angular velocity and angular acceleration of link O2A are ω = 8 rad/s and α = 0, respectively, and the driving torque (τ) is zero. The link O2A is balanced so that its centre of mass falls at O2.
Which kind of 4-bar mechanism is O2ABO4?
[2005]
Explanation
and O2O4 is fixed link. It will act as a crank-rocker mechanism
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
Try yourself:An instantaneous configuration of a four-bar mechanism, whose plane is horizontal, is shown in the figure below. At this instant, the angular velocity and angular acceleration of link O2A are ω = 8 rad/s and α = 0, respectively, and the driving torque (τ) is zero. The link O2A is balanced so that its centre of mass falls at O2.
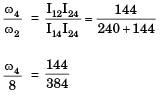
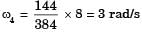
At the instant considered, what is the magnitude of the angular velocity of O4B?
[2005]
Explanation
∴
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
Try yourself:An instantaneous configuration of a four-bar mechanism, whose plane is horizontal, is shown in the figure below. At this instant, the angular velocity and angular acceleration of link O2A are ω = 8 rad/s and α = 0, respectively, and the driving torque (τ) is zero. The link O2A is balanced so that its centre of mass falls at O2.
At the same instant, if the component of the force at Joint A along AB is 30N, then the magnitude of the Joint reaction at O2
[2005]
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
Try yourself:In a four-bar linkage, S denotes the shortest link length, L is the longest link length, P and Q are the lengths of other two links. At least one of the three moving links will rotate by 360° if
[2006]
Explanation
According to Grashoff’s Criteria.
S + L ≤ P + Q
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
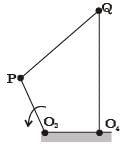
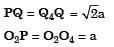
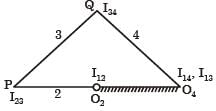
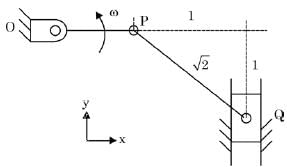
Try yourself:The input link O2P of a four bar linkage is rotated at 2 rad/s in counter clockwise direction as shown below. The angular velocity of the coupler PQ in rad/s, at an instant when ∠O4O2P = 180°, is
[2007]
Explanation
Now,
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
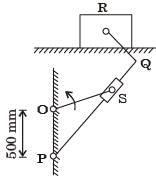
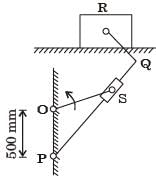
Try yourself:A quick return mechanism is shown below. The crank OS is driven at 2 rev/s in counter clockwise direction.
If the quick return ratio is 1 : 2, then the length of the crank in mm is
[2007]
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
Try yourself:A quick return mechanism is shown below. The crank OS is driven at 2 rev/s in counter clockwise direction.
The angular speed of PQ in rev/s when the block R attains maximum speed during forward stroke (stroke with slower speed) is (in rad/s)
[2007]
Explanation
Maximum speed during forward stroke occur when QR & QS are perpendicular.
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
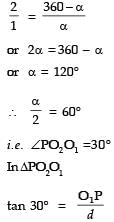
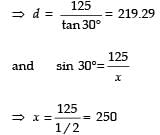
Try yourself:A simple quick return mechanism is shown in the figure. The forward to return ratio of the quick return mechanism is 2 :1. If the radius of the crank O, P is 125 mm, then the distance d(in mm) between the crank centre to lever pivot centre point should be
[2009]
Explanation
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
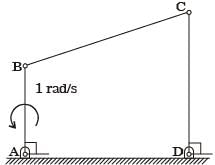
Try yourself:For the four-bar linkage shown in the figure, the angular velocity of link AB is 1 rad/s. The length of link CD is 1.5 times the length of link AB. In the configuration shown, the angular velocity of link CD in rad/s is
[2011]
Explanation
For the given configuration
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
Try yourself:A 4-bar mechanism with all revolute pairs has link lengths lf = 20 mm, lin = 40 mm, lco = 50 mm and lout = 60 mm. The suffixes 'f, in', 'co' and 'out' denote the fixed link, the input link, the coupler and output link respectively. Which one of the following statements is true about the input and output links?
[2014]
Explanation
S + L < P + Q
20 + 60 < 40 + 50
⇒ 80 < 90
If smaller link is fixed both input and Output link execute full circular motion.
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
Try yourself:Consider a slider crank mechanism with non zero masses and inertia. A constant torque t is applied on the crank as shown in the figure. Which of the following plots best resembles variation of crank angle θ versus time
[2015]
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
Try yourself:For an Oldham coupling used between two shafts, which among the following statements are correct?
I. Torsional load is transferred along shaft axis.
II. A velocity ratio of 1 : 2 between shaft is obtained without using gears.
III. Bending load is transferred transverse to shaft axis.
IV. Rotation is transferred along shaft axis.
[2018]
Explanation
The oldham coupling connects parallel shafts having small offset and in this coupling the motion (rotation) and torsion load transfer is along axes of shafts.
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
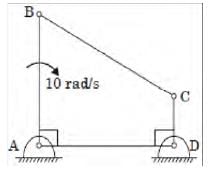
Try yourself:In a four bar planar mechanism shown in the figure, AB = 5 cm, AD = 4 cm and DC = 2 cm. In the configuration shown, both AB and DC are perpendicular to AD. The bar AB rotates with an angular velocity of 10 rad/s. The magnitude of angular velocity (in rad/s) of bar DC at this instant is
[2019]
Explanation
VC = VB
= AB x ωAB
= (0.05 x 10) m/s
Now,
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
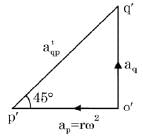
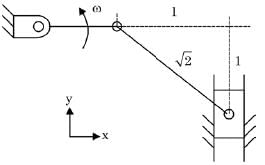
Try yourself:The crank of a slider-crank mechanism rotates counter-clock wise (CCW) with a constant angular velocity ω, as shown. Assume the length of the crank to be r.
Using exact analysis, the acceleration of the slider in the y-direction, at the instant shown, where the crank is parallel to x-axis, is given by
[2019]
Explanation
Exactly analysis means exactdimensions have to be taken. No approximation is allowed. It means velocity diagram and acceleration diagram with exact geometry (dimensions) need to be drawn.
The velocity diagram of the above problem is as follows : perpendicular to OP in the direction of movement of slider..
Since, p, q are coinciding i.e. no relative motion between p and q
∴ There will be nor adial acc. of link PQ.
Only tangential acc. will be there.
Also for link OP, α = 0 i.e. no tangential acceleration
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
Try yourself:The number of degrees of freedom of a five link plane mechanism with five revolute pairs as shown in the figure is
[1993]
Explanation
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
Try yourself:Match the following with respect to spatial mechanisms.
[2004]
Explanation
For revolute joint, degree of freedom = 1
For cylinderical joing, degree of freedom = 2
For spherical joint, degree of freedom = 3
Degree of constraints = 6 – Degree of freedom
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
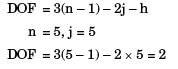
Try yourself:The number of degrees of freedom of a planar linkage with 8 links and 9 simple revolute joints is
[2019]
Explanation
Number of degree of freedom,
n =3(l – 1) – 2j – h
= (3 × 7) – (2 × 9) – 0 = 3
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
Try yourself:A planar mechanism has 8 links and 10 rotary joints. The number of degrees of freedom of the mechanism, using Grubler's criterion, is
[2008]
Explanation
By Gruebler’s criterion,
F = 3(l – 1) – 2j
= 3(8 – 1) – 2 × 10 = 1
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
Try yourself:Mobility of a statically indeterminate structure is
[2010]
Explanation
Mobility (DOF) for a statically in deter minate structure is always less than zero.
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
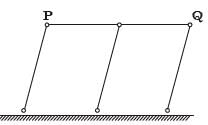
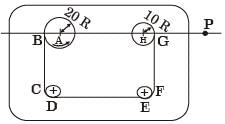
Try yourself:A double parallelogram mechanism is shown in the figure. Note that PQ is a single link. The mobility of the mechanism is
[2011]
Explanation
There is one link which is redundantin nature.
Therefore, DOF = 1.
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
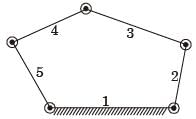
Try yourself:The number of degrees of freedom of the linkage shown in the figure is
[2015]
Explanation
Number of links, N = 6
Total number as binary joints, j = 7
F = 3 (N – 1) – 2j = 15 – 14 = 1.
Report a problem
View Solution
Question for GATE Past Year Questions: Kinematics of Mechanisms
Try yourself:The number of degrees of freedom in a planar mechanism having n links and j simple hinge joints is
[2016]
Explanation
DOF = 3(n – 1) – 2j
Report a problem
View Solution
The document GATE Past Year Questions: Kinematics of Mechanisms | Theory of Machines (TOM) - Mechanical Engineering is a part of the Mechanical Engineering Course Theory of Machines (TOM).
FAQs on GATE Past Year Questions: Kinematics of Mechanisms - Theory of Machines (TOM) - Mechanical Engineering
1. What is kinematics of mechanisms in mechanical engineering?
Ans. Kinematics of mechanisms in mechanical engineering is the study of motion of various components of a mechanism or machine without considering the forces that cause the motion. It involves analyzing the position, velocity, and acceleration of different parts of the mechanism to understand how they move and interact with each other.
2. How is kinematics of mechanisms different from kinetics of mechanisms?
Ans. Kinematics of mechanisms deals with the motion of components without considering the forces, while kinetics of mechanisms focuses on the forces and torques that cause the motion. In simpler terms, kinematics is concerned with "how things move," whereas kinetics is concerned with "why things move."
3. What are the different types of motion in kinematics of mechanisms?
Ans. In kinematics of mechanisms, there are four types of motion: translation, rotation, oscillation, and combination of these motions. Translation refers to linear motion along a straight line, rotation refers to circular motion around an axis, oscillation refers to repeated back-and-forth motion, and combination refers to a combination of translation and rotation.
4. How is kinematics of mechanisms applied in mechanical engineering?
Ans. Kinematics of mechanisms is applied in mechanical engineering to design and analyze various machines and mechanisms. It helps engineers understand how different components move and interact with each other, enabling them to optimize the design, predict performance, and identify potential issues such as interference or excessive wear.
5. What are the key concepts in kinematics of mechanisms?
Ans. The key concepts in kinematics of mechanisms include displacement, velocity, acceleration, and linkage analysis. Displacement refers to the change in position of a component, velocity is the rate of change of displacement, acceleration is the rate of change of velocity, and linkage analysis involves studying the connections and interactions between various components of a mechanism.






 perpendicular to OP
perpendicular to OP in the direction of movement of slider..
in the direction of movement of slider..
 will be there.
will be there.