Chapter Notes: Overview: Parametric Equations, Polar Coordinates, and Vector-Valued Functions


Functions in mathematics extend beyond the familiar xy-plane, or ℝ², known as the Cartesian plane. This unit introduces alternative coordinate systems to model real-world phenomena, such as object motion or complex curves. Representing 11-12% of the AP Calculus BC exam, this section is formula-intensive. Memorizing key formulas is ideal, though some can be derived during the exam. Below, we dive into parametric equations, vector-valued functions, polar coordinates, and their applications.
Parametric Equations: Definition and Differentiation
Parametric equations describe relationships between variables using a parameter, often time (t). They are particularly useful for modeling motion or curve shapes in space. A parametric equation takes the form:
x = f(t), y = g(t)
Here, x and y represent coordinates on a curve, with t as the independent variable (time). Varying t traces the curve's path. Both x and y are dependent on t.
To find the derivative of a parametric function, compute the derivatives of x(t) and y(t) with respect to t, then form the ratio:
dy/dx = (dy/dt) / (dx/dt)
The dt terms cancel, yielding the slope of the curve at any point.
Second Derivatives of Parametric Equations
Second derivatives for parametric functions differ from those in Cartesian systems. After finding the first derivative dy/dx, apply the chain rule to compute the second derivative:
d²y/dx² =

First, calculate dy/dx as shown above, then differentiate it with respect to t (often using the quotient rule), and divide by dx/dt. This process involves multiple steps but becomes manageable with practice.
Arc Length of Parametric Curves
Arc length measures the distance along a curve between two points. For Cartesian functions, the arc length formula is familiar, but for parametric equations, it accounts for two dependent variables:
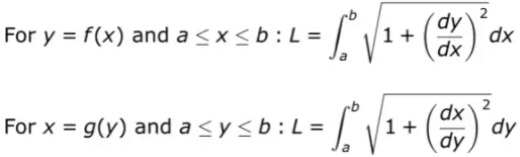
The same logic still applies to parametric equations, but the formula looks a bit different since x and y are both dependent variables. This is the formula for the arc length of a parametric equation:
This formula squares the derivatives of x(t) and y(t), sums them, takes the square root, and integrates over the interval from t = a to t = b, reflecting that t is the independent variable.
Vector-Valued Functions: Definition and Differentiation
Vector-valued functions map a real number to a vector in space, often written as:
r(t) = <f(t), g(t)> or r(t) = f(t)i + g(t)j
Here, f(t) and g(t) are real-valued functions, and i and j are unit vectors in the x- and y-directions. These functions model motion, with r(t) representing position, its first derivative velocity, and its second derivative acceleration.
To differentiate, compute the derivative of each component separately. For example, given a position function:
s(t) = <3t + 2, ln(t + 9)>
The velocity function is:
v(t) = s'(t) = <3, 1/(t + 9)>
Note that the derivative of ln(t + 9) uses the rule u'/u, where u = t + 9.

Integrating Vector-Valued Functions
Integration of vector-valued functions involves finding the antiderivative of each component individually. For example, given a velocity function:
v(t) = <2t, 3t²>
Integrate each component to find the displacement:
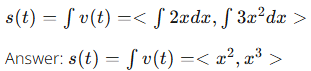
This process mirrors differentiation but in reverse, computing each integral separately.
Motion Problems with Parametric and Vector-Valued Functions
Motion problems use parametric or vector-valued functions to describe an object's position, velocity, and acceleration. Consider a particle moving in the xy-plane with parametric equations:
x = t³ - 6t²,
y = 2t² - 4t
The position vector is:
r(t) = <t³ - 6t², 2t² - 4t>
Velocity is the first derivative:
v(t) = <3t² - 12t, 4t - 4>
At t = 2 seconds, the position is:
r(2) = <2³ - 6(2)², 2(2)² - 4(2)> = <-4, 4>
The velocity is:
v(2) = <3(2)² - 12(2), 4(2) - 4> = <4, 0>
Thus, at t = 2, the particle is at (-4, 4) with a velocity of 4 units/s in the x-direction and 0 units/s in the y-direction.
Polar Coordinates and Differentiation
Polar coordinates define a point's position using a radial distance (r) from the origin and an angle (θ) from the positive x-axis, measured in radians. A polar function is written as:
r = f(θ)
To differentiate, use the chain rule to find dy/dx in terms of r and θ. Conversion between polar and Cartesian coordinates is possible using:
 To find the derivative of a polar function, we can use the chain rule to derive a formula. It is helpful to memorize the formula, but you can also derive it during the test.
To find the derivative of a polar function, we can use the chain rule to derive a formula. It is helpful to memorize the formula, but you can also derive it during the test.
Slope of Tangent Line for Polar Functions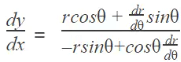
You can also convert between a polar function and a Cartesian function. To go from polar to Cartesian, use the first two formulas, and to go from Cartesian to polar, use the third formula.
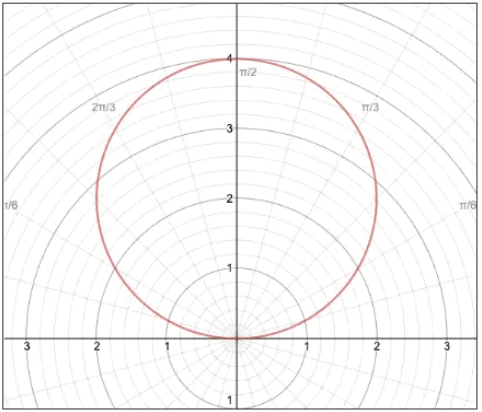
Area of a Polar Region
The area enclosed by a polar curve r = f(θ) is calculated as:
Simple Area Under Polar Curves
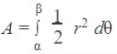
Where a and b are the limits of integration and r is the polar function. This integral is calculated by taking the product of 1/2 and the square of the polar function, and then integrating this expression with respect to theta from a to b.
It's important to note that this method of finding the area under a polar curve is only valid for closed curves, meaning the curve starts and ends at the same point. If it's not a closed curve, we have to find the area enclosed by the curve and a line connecting the start and the end of the curve.
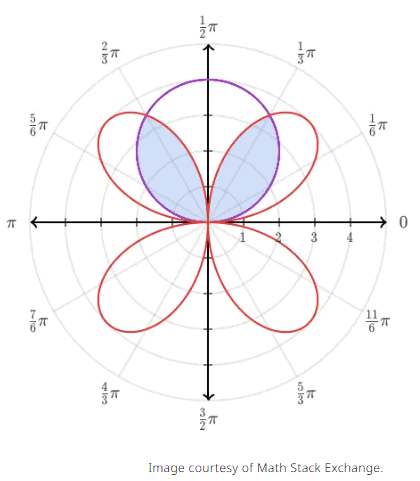
Area Between Two Polar Curves
The area between an outer curve R = f(θ) and an inner curve r = g(θ) is:
A = (1/2) ∫(a to b) (R² - r²) dθ
Where a and b are the limits of integration, R is the equation of the outer curve and r is the equation of the inner curve. This integral is calculated by taking the difference of the square of the outer curve and the square of the inner curve and then integrating this expression with respect to theta from a to b.
This is similar to finding the integral between two curves in the Cartesian plane. Where you subtracted the bottom curve from the top curve, you'll now subtract the inner curve from the outer curve.
Key Terms
- Acceleration Vector-Valued Function: Describes the rate of change of velocity, including magnitude and direction.
- Antiderivative of a Vector-Valued Function: The integral of each component, yielding the original function.
- Area Between Two Polar Curves: Space enclosed between two polar curves, calculated via integration.
- Cartesian Plane: A 2D system (ℝ²) with x- and y-axes for locating points.
- Closed Curves: Continuous loops with no endpoints, like circles or ellipses.
- Derivative of a Parametric Function: The rate of change of y with respect to x, computed as (dy/dt)/(dx/dt).
- Differentiating a Vector-Valued Function: Taking the derivative of each component separately.
- Displacement: A vector describing an object's change in position.
- Inner Curve: The boundary closest to the center in a polar or parametric system.
- Integral from t=a to t=b: Computes the accumulated quantity over a time interval.
- Integrating Vector-Valued Functions: Finding the antiderivative of each component.
- y = g(t): A function where y depends on the parameter t.
- r = f(θ): A polar function relating radial distance to angle.
- Limits of Integration: The bounds defining the interval for an integral.
- Outer Curve: The boundary farthest from the center in a polar or parametric system.
- Parametric Equations: Equations expressing coordinates in terms of a parameter, often time.
- Polar Plane: A coordinate system using radial distance and angle.
- Polar Form: Represents complex numbers using magnitude and angle.
- Polar Coordinates: A system using r and θ to locate points.
- Unit Vectors: Vectors of magnitude 1, used to indicate direction.
- Velocity Vector-Valued Function: Describes an object's rate of position change with magnitude and direction.
FAQs on Chapter Notes: Overview: Parametric Equations, Polar Coordinates, and Vector-Valued Functions
| 1. What are parametric equations and how are they used in calculus? |  |
| 2. How do you find the second derivative of parametric equations? | |
| 3. What is the formula for calculating the arc length of a parametric curve? | |
| 4. What are vector-valued functions and how do you differentiate them? | |
| 5. How do you calculate the area of a region defined by polar coordinates? | |