Feedback Systems

Fundamental Definitions and System Representations
A feedback system is a control system in which the output is measured and compared with the input (reference), and the difference (error) is used to drive the system toward the desired response. Feedback systems can be positive or negative; negative feedback reduces error and improves stability, while positive feedback amplifies the error and is generally avoided in control applications. The basic components of a feedback control system include:- Plant (Process): The system or process to be controlled
- Controller: Device that generates the control signal based on the error
- Sensor/Measurement: Device that measures the output
- Reference Input: Desired value or setpoint
- Error Signal: Difference between reference and measured output
Transfer Functions
The transfer function \( G(s) \) of a linear time-invariant (LTI) system is the ratio of the Laplace transform of the output to the Laplace transform of the input, assuming zero initial conditions: \[ G(s) = \frac{Y(s)}{X(s)} \] For a general transfer function: \[ G(s) = \frac{b_m s^m + b_{m-1} s^{m-1} + \cdots + b_1 s + b_0}{a_n s^n + a_{n-1} s^{n-1} + \cdots + a_1 s + a_0} \] The poles are the values of \( s \) that make the denominator zero, and the zeros are the values of \( s \) that make the numerator zero. Poles determine system stability and transient response characteristics.Block Diagram Algebra and Reduction
Block diagrams represent the functional relationships between components in a control system. Key reduction rules include:- Series (Cascade): \( G_{total} = G_1 \cdot G_2 \cdot G_3 \cdots \)
- Parallel: \( G_{total} = G_1 + G_2 + G_3 \cdots \)
- Feedback Loop: For negative feedback with forward path \( G(s) \) and feedback path \( H(s) \): \[ T(s) = \frac{G(s)}{1 + G(s)H(s)} \]
- Positive Feedback: \[ T(s) = \frac{G(s)}{1 - G(s)H(s)} \]
Signal Flow Graphs and Mason's Gain Formula
Signal flow graphs provide an alternative graphical representation using nodes and directed branches. Mason's Gain Formula calculates the overall transfer function: \[ T = \frac{1}{\Delta} \sum_{k=1}^{N} P_k \Delta_k \] where:- \( P_k \) = gain of the \( k^{th} \) forward path
- \( \Delta \) = 1 - (sum of all individual loop gains) + (sum of gain products of all non-touching loops taken two at a time) - (sum of gain products of all non-touching loops taken three at a time) + ...
- \( \Delta_k \) = value of \( \Delta \) for that part of the graph not touching the \( k^{th} \) forward path
Time-Domain Analysis and System Response
First-Order Systems
The standard form of a first-order system is: \[ G(s) = \frac{K}{\tau s + 1} \] where \( K \) is the DC gain and \( \tau \) is the time constant. The step response is: \[ y(t) = K \left(1 - e^{-t/\tau}\right) \] Key characteristics:- Time constant \( \tau \): Time to reach 63.2% of final value
- Settling time \( t_s \): Approximately \( 4\tau \) (within 2% of final value)
Second-Order Systems
The standard form of a second-order system is: \[ G(s) = \frac{\omega_n^2}{s^2 + 2\zeta\omega_n s + \omega_n^2} \] where:- \( \omega_n \) = natural frequency (rad/s)
- \( \zeta \) = damping ratio (dimensionless)
- Underdamped (\( 0 < \zeta="">< 1=""> Complex conjugate poles; oscillatory response
- Critically damped (\( \zeta = 1 \)): Real, repeated poles; fastest response without overshoot
- Overdamped (\( \zeta > 1 \)): Two distinct real poles; slow, non-oscillatory response
- Undamped (\( \zeta = 0 \)): Pure imaginary poles; sustained oscillation
Steady-State Error Analysis
Steady-state error \( e_{ss} \) is the difference between the input and output as time approaches infinity. For unity feedback systems, it depends on the system type (number of integrators in the open-loop transfer function) and input type. The open-loop transfer function in standard form: \[ G(s) = \frac{K(s+z_1)(s+z_2)\cdots}{s^N(s+p_1)(s+p_2)\cdots} \] where \( N \) is the system type. Error constants:- Position error constant: \( K_p = \lim_{s \to 0} G(s) \)
- Velocity error constant: \( K_v = \lim_{s \to 0} s \cdot G(s) \)
- Acceleration error constant: \( K_a = \lim_{s \to 0} s^2 \cdot G(s) \)
 where \( A \) is the magnitude of the input.
where \( A \) is the magnitude of the input.Stability Analysis
A system is stable if all poles of the closed-loop transfer function lie in the left half of the \( s \)-plane (negative real parts). If any pole has a positive real part, the system is unstable. Poles on the imaginary axis indicate marginal stability.Routh-Hurwitz Stability Criterion
The Routh-Hurwitz criterion determines stability without solving for roots explicitly. For a characteristic equation: \[ a_n s^n + a_{n-1} s^{n-1} + \cdots + a_1 s + a_0 = 0 \] Construct the Routh array: where: \[ b_1 = \frac{a_{n-1}a_{n-2} - a_n a_{n-3}}{a_{n-1}} \] \[ b_2 = \frac{a_{n-1}a_{n-4} - a_n a_{n-5}}{a_{n-1}} \] Continue this pattern for subsequent rows. Stability condition: The number of sign changes in the first column equals the number of right half-plane poles. For stability, all elements in the first column must be positive.
where: \[ b_1 = \frac{a_{n-1}a_{n-2} - a_n a_{n-3}}{a_{n-1}} \] \[ b_2 = \frac{a_{n-1}a_{n-4} - a_n a_{n-5}}{a_{n-1}} \] Continue this pattern for subsequent rows. Stability condition: The number of sign changes in the first column equals the number of right half-plane poles. For stability, all elements in the first column must be positive.Nyquist Stability Criterion
The Nyquist criterion relates open-loop frequency response to closed-loop stability. The Nyquist plot is a polar plot of \( G(j\omega)H(j\omega) \) as \( \omega \) varies from \( -\infty \) to \( +\infty \). Nyquist stability criterion: \[ Z = N + P \] where:- \( Z \) = number of closed-loop poles in right half-plane
- \( P \) = number of open-loop poles in right half-plane
- \( N \) = number of clockwise encirclements of the point (-1, 0)
Gain and Phase Margins
Gain margin (GM): The amount of gain increase that can be tolerated before instability occurs. Measured at the frequency where phase is -180°. \[ GM = \frac{1}{|G(j\omega_{pc})H(j\omega_{pc})|} \] In decibels: \[ GM_{dB} = -20\log_{10}|G(j\omega_{pc})H(j\omega_{pc})| \] where \( \omega_{pc} \) is the phase crossover frequency (phase = -180°). Phase margin (PM): The amount of additional phase lag that can be tolerated before instability. Measured at the frequency where magnitude is 1 (0 dB). \[ PM = 180° + \angle G(j\omega_{gc})H(j\omega_{gc}) \] where \( \omega_{gc} \) is the gain crossover frequency (|G(jω)H(jω)| = 1). Typical design guidelines:- GM > 6 dB (factor of 2 or more)
- PM > 30° to 60° (45° is common)
Frequency-Domain Analysis
Bode Plots
Bode plots consist of two graphs:- Magnitude plot: 20log₁₀|G(jω)| in dB versus log(ω)
- Phase plot: ∠G(jω) in degrees versus log(ω)
- Magnitude: 20log₁₀(K) dB (horizontal line)
- Phase: 0° (if K > 0)
- Magnitude: -20 dB/decade slope
- Phase: -90°
- Magnitude: +20 dB/decade slope
- Phase: +90°
- Magnitude: 0 dB for ω < ω₀;="" -20="" db/decade="" for="" ω="">> ω₀
- Phase: 0° at ω = 0.1ω₀; -45° at ω = ω₀; -90° at ω = 10ω₀
- Corner frequency at ω₀
- Magnitude: 0 dB for ω < ω₀;="" +20="" db/decade="" for="" ω="">> ω₀
- Phase: 0° at ω = 0.1ω₀; +45° at ω = ω₀; +90° at ω = 10ω₀
- Magnitude: 0 dB for ω < ωₙ;="" -40="" db/decade="" for="" ω="">> ωₙ
- Peak at ωₙ if ζ <>
- Phase: 0° for ω < ωₙ;="" -90°="" at="" ω="ωₙ;" -180°="" for="" ω="">> ωₙ
Root Locus Method
The root locus is a graphical method showing how closed-loop poles move in the s-plane as a system parameter (typically gain K) varies from 0 to ∞. For a unity feedback system with open-loop transfer function \( KG(s) \), the closed-loop characteristic equation is: \[ 1 + KG(s) = 0 \] Root locus construction rules:- Number of branches: Equal to the number of poles of G(s)
- Starting points (K = 0): Open-loop poles
- Ending points (K → ∞): Open-loop zeros (finite or at infinity)
- Segments on real axis: Root locus exists to the left of an odd number of real poles and zeros
- Asymptotes: For n poles and m zeros (n > m):
- Number of asymptotes = n - m
- Angles: \( \theta_k = \frac{(2k + 1) \times 180°}{n - m} \), k = 0, 1, 2, ...
- Centroid (intersection point): \( \sigma_a = \frac{\sum \text{poles} - \sum \text{zeros}}{n - m} \)
- Breakaway/break-in points: Found by solving \( \frac{dK}{ds} = 0 \)
- Angle of departure/arrival: From complex poles/zeros calculated using angle criterion
Controller Design and Compensation
Proportional (P) Control
\[ u(t) = K_p e(t) \] \[ G_c(s) = K_p \]- Simple implementation
- Increases loop gain
- Does not eliminate steady-state error for type 0 systems
- May reduce stability margins
Proportional-Integral (PI) Control
\[ u(t) = K_p e(t) + K_i \int e(t) dt \] \[ G_c(s) = K_p + \frac{K_i}{s} = K_p \left(1 + \frac{1}{T_i s}\right) \]- Adds a pole at origin (increases system type by 1)
- Eliminates steady-state error for step inputs
- May increase overshoot and settling time
Proportional-Derivative (PD) Control
\[ u(t) = K_p e(t) + K_d \frac{de(t)}{dt} \] \[ G_c(s) = K_p + K_d s = K_p(1 + T_d s) \]- Adds a zero to the system
- Improves transient response (reduces overshoot, settling time)
- Increases damping
- Sensitive to noise
Proportional-Integral-Derivative (PID) Control
\[ u(t) = K_p e(t) + K_i \int e(t) dt + K_d \frac{de(t)}{dt} \] \[ G_c(s) = K_p + \frac{K_i}{s} + K_d s \]- Combines benefits of PI and PD
- Eliminates steady-state error while improving transient response
- Most common industrial controller
Lead Compensation
\[ G_c(s) = K \frac{s + z}{s + p} \quad \text{where } z < p="" \]="">- Increases phase margin (improves stability)
- Increases bandwidth (faster response)
- Used to improve transient response
Lag Compensation
\[ G_c(s) = K \frac{s + z}{s + p} \quad \text{where } z > p \]- Increases low-frequency gain
- Reduces steady-state error
- Minimal impact on transient response if designed properly
State-Space Representation
The state-space representation provides a time-domain approach to system modeling: \[ \dot{\mathbf{x}}(t) = \mathbf{A}\mathbf{x}(t) + \mathbf{B}\mathbf{u}(t) \] \[ \mathbf{y}(t) = \mathbf{C}\mathbf{x}(t) + \mathbf{D}\mathbf{u}(t) \] where:- \( \mathbf{x}(t) \) = state vector (n × 1)
- \( \mathbf{u}(t) \) = input vector (r × 1)
- \( \mathbf{y}(t) \) = output vector (m × 1)
- \( \mathbf{A} \) = system matrix (n × n)
- \( \mathbf{B} \) = input matrix (n × r)
- \( \mathbf{C} \) = output matrix (m × n)
- \( \mathbf{D} \) = feedforward matrix (m × r)
 ## Solved Examples
## Solved ExamplesExample 1: Second-Order System Analysis and Performance Specifications
Problem Statement: A unity feedback control system has the following open-loop transfer function: \[ G(s) = \frac{100}{s(s+8)} \] Determine: (a) the damping ratio ζ, (b) the natural frequency ωₙ in rad/s, (c) the percent overshoot, (d) the peak time in seconds, and (e) the settling time (2% criterion) in seconds. Given Data:- Open-loop transfer function: \( G(s) = \frac{100}{s(s+8)} \)
- Unity feedback system: \( H(s) = 1 \)
(b) Natural frequency ωₙ (rad/s)
(c) Percent overshoot
(d) Peak time tₚ (s)
(e) Settling time t_s (s) Solution: Step 1: Determine the closed-loop transfer function For a unity feedback system: \[ T(s) = \frac{G(s)}{1 + G(s)H(s)} = \frac{G(s)}{1 + G(s)} \] \[ T(s) = \frac{\frac{100}{s(s+8)}}{1 + \frac{100}{s(s+8)}} = \frac{100}{s(s+8) + 100} = \frac{100}{s^2 + 8s + 100} \] Step 2: Compare with standard second-order form Standard form: \( T(s) = \frac{\omega_n^2}{s^2 + 2\zeta\omega_n s + \omega_n^2} \) From our closed-loop transfer function: \[ s^2 + 8s + 100 \] Comparing coefficients: \[ \omega_n^2 = 100 \] \[ 2\zeta\omega_n = 8 \] Step 3: Calculate natural frequency ωₙ \[ \omega_n = \sqrt{100} = 10 \text{ rad/s} \] (b) Answer: ωₙ = 10 rad/s Step 4: Calculate damping ratio ζ \[ 2\zeta\omega_n = 8 \] \[ \zeta = \frac{8}{2 \times 10} = \frac{8}{20} = 0.4 \] (a) Answer: ζ = 0.4 Since ζ < 1,="" the="" system="" is="" underdamped="" and="" will="" exhibit="" overshoot.="">Step 5: Calculate percent overshoot \[ PO = e^{-\pi\zeta/\sqrt{1-\zeta^2}} \times 100\% \] \[ PO = e^{-\pi(0.4)/\sqrt{1-(0.4)^2}} \times 100\% \] \[ PO = e^{-\pi(0.4)/\sqrt{1-0.16}} \times 100\% \] \[ PO = e^{-\pi(0.4)/\sqrt{0.84}} \times 100\% \] \[ PO = e^{-1.2566/0.9165} \times 100\% \] \[ PO = e^{-1.371} \times 100\% \] \[ PO = 0.254 \times 100\% = 25.4\% \] (c) Answer: Percent overshoot = 25.4% Step 6: Calculate damped natural frequency \[ \omega_d = \omega_n\sqrt{1 - \zeta^2} \] \[ \omega_d = 10\sqrt{1 - (0.4)^2} = 10\sqrt{0.84} = 10 \times 0.9165 = 9.165 \text{ rad/s} \] Step 7: Calculate peak time \[ t_p = \frac{\pi}{\omega_d} = \frac{\pi}{9.165} = \frac{3.1416}{9.165} = 0.343 \text{ s} \] (d) Answer: Peak time tₚ = 0.343 s Step 8: Calculate settling time (2% criterion) \[ t_s = \frac{4}{\zeta\omega_n} = \frac{4}{0.4 \times 10} = \frac{4}{4} = 1.0 \text{ s} \] (e) Answer: Settling time t_s = 1.0 s Final Summary:
- (a) ζ = 0.4
- (b) ωₙ = 10 rad/s
- (c) PO = 25.4%
- (d) tₚ = 0.343 s
- (e) t_s = 1.0 s
Example 2: Routh-Hurwitz Stability Analysis and Critical Gain
Problem Statement: A unity feedback control system has the open-loop transfer function: \[ G(s) = \frac{K}{s(s+2)(s+5)} \] Using the Routh-Hurwitz stability criterion, determine: (a) the range of K for which the closed-loop system is stable, and (b) the value of K that results in marginal stability, along with the frequency of oscillation at this condition. Given Data:- Open-loop transfer function: \( G(s) = \frac{K}{s(s+2)(s+5)} \)
- Unity feedback: \( H(s) = 1 \)
(b) Critical gain K for marginal stability and frequency of oscillation Solution: Step 1: Determine the closed-loop characteristic equation For unity feedback: \[ 1 + G(s)H(s) = 0 \] \[ 1 + \frac{K}{s(s+2)(s+5)} = 0 \] Multiply both sides by \( s(s+2)(s+5) \): \[ s(s+2)(s+5) + K = 0 \] Expand \( s(s+2)(s+5) \): \[ s(s^2 + 5s + 2s + 10) = s(s^2 + 7s + 10) = s^3 + 7s^2 + 10s \] Characteristic equation: \[ s^3 + 7s^2 + 10s + K = 0 \] Step 2: Construct the Routh array For the equation \( s^3 + 7s^2 + 10s + K = 0 \): Coefficients: \( a_3 = 1, a_2 = 7, a_1 = 10, a_0 = K \) Routh array:
 Calculate \( b_1 \): \[ b_1 = \frac{a_2 \cdot a_1 - a_3 \cdot K}{a_2} = \frac{7 \times 10 - 1 \times K}{7} = \frac{70 - K}{7} \] Calculate \( c_1 \): \[ c_1 = \frac{b_1 \cdot K - a_2 \cdot 0}{b_1} = K \] Updated Routh array:
Calculate \( b_1 \): \[ b_1 = \frac{a_2 \cdot a_1 - a_3 \cdot K}{a_2} = \frac{7 \times 10 - 1 \times K}{7} = \frac{70 - K}{7} \] Calculate \( c_1 \): \[ c_1 = \frac{b_1 \cdot K - a_2 \cdot 0}{b_1} = K \] Updated Routh array: 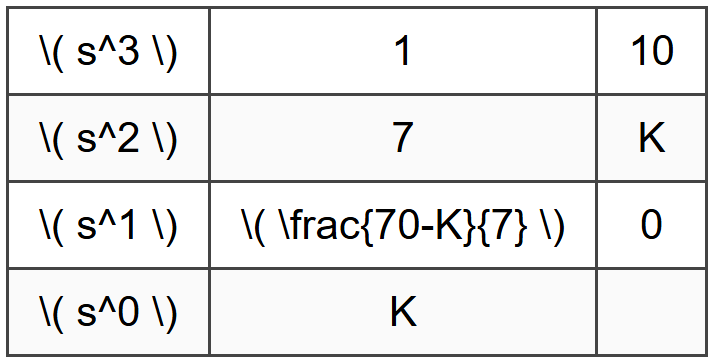 Step 3: Apply stability conditions For stability, all elements in the first column must be positive: From \( s^3 \) row: 1 > 0 ✓ (always satisfied) From \( s^2 \) row: 7 > 0 ✓ (always satisfied) From \( s^1 \) row: \( \frac{70-K}{7} > 0 \) \[ 70 - K > 0 \] \[ K < 70="" \]="" from="" \(="" s^0="" \)="" row:="" \(="" k=""> 0 \) Step 4: Determine stability range Combining conditions: \[ 0 < k="">< 70="" \]="">(a) Answer: For stability, 0 < k=""><> Step 5: Determine marginal stability condition Marginal stability occurs when the \( s^1 \) row element equals zero: \[ \frac{70-K}{7} = 0 \] \[ 70 - K = 0 \] \[ K = 70 \] (b) Answer: Critical gain K = 70 Step 6: Find frequency of oscillation at marginal stability At marginal stability, the characteristic equation has purely imaginary roots (poles on jω axis). Use the auxiliary equation from the \( s^2 \) row: \[ 7s^2 + K = 0 \] Substitute K = 70: \[ 7s^2 + 70 = 0 \] \[ s^2 + 10 = 0 \] \[ s^2 = -10 \] \[ s = \pm j\sqrt{10} = \pm j3.162 \] Frequency of oscillation: \[ \omega = \sqrt{10} = 3.162 \text{ rad/s} \] Converting to Hz (if needed): \[ f = \frac{\omega}{2\pi} = \frac{3.162}{6.283} = 0.503 \text{ Hz} \] Answer: Frequency of oscillation ω = 3.162 rad/s (or f = 0.503 Hz) Final Summary:
Step 3: Apply stability conditions For stability, all elements in the first column must be positive: From \( s^3 \) row: 1 > 0 ✓ (always satisfied) From \( s^2 \) row: 7 > 0 ✓ (always satisfied) From \( s^1 \) row: \( \frac{70-K}{7} > 0 \) \[ 70 - K > 0 \] \[ K < 70="" \]="" from="" \(="" s^0="" \)="" row:="" \(="" k=""> 0 \) Step 4: Determine stability range Combining conditions: \[ 0 < k="">< 70="" \]="">(a) Answer: For stability, 0 < k=""><> Step 5: Determine marginal stability condition Marginal stability occurs when the \( s^1 \) row element equals zero: \[ \frac{70-K}{7} = 0 \] \[ 70 - K = 0 \] \[ K = 70 \] (b) Answer: Critical gain K = 70 Step 6: Find frequency of oscillation at marginal stability At marginal stability, the characteristic equation has purely imaginary roots (poles on jω axis). Use the auxiliary equation from the \( s^2 \) row: \[ 7s^2 + K = 0 \] Substitute K = 70: \[ 7s^2 + 70 = 0 \] \[ s^2 + 10 = 0 \] \[ s^2 = -10 \] \[ s = \pm j\sqrt{10} = \pm j3.162 \] Frequency of oscillation: \[ \omega = \sqrt{10} = 3.162 \text{ rad/s} \] Converting to Hz (if needed): \[ f = \frac{\omega}{2\pi} = \frac{3.162}{6.283} = 0.503 \text{ Hz} \] Answer: Frequency of oscillation ω = 3.162 rad/s (or f = 0.503 Hz) Final Summary:- (a) Stable range: 0 < k=""><>
- (b) Critical gain: K = 70; Oscillation frequency: ω = 3.162 rad/s
- Transfer function: \( G(s) = \frac{Y(s)}{X(s)} \)
- Series connection: \( G_{total} = G_1 \cdot G_2 \cdot G_3 \)
- Parallel connection: \( G_{total} = G_1 + G_2 + G_3 \)
- Negative feedback: \( T(s) = \frac{G(s)}{1 + G(s)H(s)} \)
- Mason's Gain Formula: \( T = \frac{1}{\Delta}\sum P_k \Delta_k \)
- Standard form: \( G(s) = \frac{K}{\tau s + 1} \)
- Time constant: τ (time to reach 63.2%)
- Settling time: \( t_s \approx 4\tau \)
- Standard form: \( G(s) = \frac{\omega_n^2}{s^2 + 2\zeta\omega_n s + \omega_n^2} \)
- Damping classifications: Underdamped (0 < ζ="">< 1),="" critically="" damped="" (ζ="1)," overdamped="" (ζ=""> 1)
- Percent overshoot: \( PO = e^{-\pi\zeta/\sqrt{1-\zeta^2}} \times 100\% \)
- Peak time: \( t_p = \frac{\pi}{\omega_n\sqrt{1-\zeta^2}} \)
- Settling time (2%): \( t_s \approx \frac{4}{\zeta\omega_n} \)
- Rise time: \( t_r \approx \frac{1.8}{\omega_n} \)
- Type 0 step error: \( e_{ss} = \frac{A}{1 + K_p} \)
- Type 1 ramp error: \( e_{ss} = \frac{A}{K_v} \)
- Type 2 parabolic error: \( e_{ss} = \frac{A}{K_a} \)
- Position constant: \( K_p = \lim_{s \to 0} G(s) \)
- Velocity constant: \( K_v = \lim_{s \to 0} s \cdot G(s) \)
- Acceleration constant: \( K_a = \lim_{s \to 0} s^2 \cdot G(s) \)
- Stability condition: All poles in left half-plane (negative real parts)
- Routh-Hurwitz: All first-column elements positive → stable
- Nyquist criterion: Z = N + P (Z must equal 0 for stability)
- Gain margin: GM_dB = -20log₁₀|G(jω_pc)H(jω_pc)|; should be > 6 dB
- Phase margin: PM = 180° + ∠G(jω_gc)H(jω_gc); should be 30° to 60°
- Pole at origin (1/s): -20 dB/decade, -90° phase
- Zero at origin (s): +20 dB/decade, +90° phase
- First-order pole: -20 dB/decade above corner frequency
- First-order zero: +20 dB/decade above corner frequency
- Second-order pole: -40 dB/decade above corner frequency
- Number of branches: Equal to number of open-loop poles
- Real axis segments: To left of odd number of poles/zeros
- Asymptote angles: \( \theta_k = \frac{(2k+1)180°}{n-m} \)
- Asymptote centroid: \( \sigma_a = \frac{\sum \text{poles} - \sum \text{zeros}}{n-m} \)
- P controller: \( G_c(s) = K_p \)
- PI controller: \( G_c(s) = K_p(1 + \frac{1}{T_i s}) \) - eliminates steady-state error
- PD controller: \( G_c(s) = K_p(1 + T_d s) \) - improves transient response
- PID controller: \( G_c(s) = K_p + \frac{K_i}{s} + K_d s \)
- Lead compensator: Increases phase margin, faster response
- Lag compensator: Increases low-frequency gain, reduces steady-state error
- State equations: \( \dot{\mathbf{x}} = \mathbf{Ax} + \mathbf{Bu} \); \( \mathbf{y} = \mathbf{Cx} + \mathbf{Du} \)
- Transfer function: \( G(s) = \mathbf{C}(s\mathbf{I} - \mathbf{A})^{-1}\mathbf{B} + \mathbf{D} \)
- Poles: Eigenvalues of matrix A
- Controllability matrix: \( \mathcal{C} = [\mathbf{B} \quad \mathbf{AB} \quad \cdots \quad \mathbf{A}^{n-1}\mathbf{B}] \)
- Observability matrix: \( \mathcal{O} = [\mathbf{C}^T \quad (\mathbf{CA})^T \quad \cdots \quad (\mathbf{CA}^{n-1})^T]^T \)
Question 1: A unity feedback control system has an open-loop transfer function G(s) = K/(s² + 6s + 8). To achieve a steady-state error of less than 10% for a unit step input, what is the minimum value of gain K required?
(A) K > 8
(B) K > 9
(C) K > 10
(D) K > 12
Question 2: For a control system, stability analysis requires determining whether poles lie in specific regions of the s-plane. Which of the following statements regarding system stability is correct?
(A) A system with one pole at s = -2 + j3 and another at s = -2 - j3 is unstable
(B) A system with a pole at s = 0 is always unstable
(C) A system with all poles having negative real parts is stable
(D) The imaginary part of poles determines stability
Question 3: An industrial process control system is being designed for a chemical reactor. The system requires maintaining temperature within ±2°C of setpoint during normal operation. Initial testing with a proportional controller shows a 5°C steady-state error for step changes in setpoint. The system exhibits a settling time of 45 seconds and 15% overshoot with the current proportional gain of Kₚ = 8. The control engineer must reduce the steady-state error to acceptable levels while maintaining reasonable transient response. Which controller modification is most appropriate?
(A) Increase proportional gain to Kₚ = 20
(B) Implement PI control with Kₚ = 8 and add integral action
(C) Implement PD control with Kₚ = 8 and add derivative action
(D) Decrease proportional gain to Kₚ = 4 and accept longer settling time
Question 4: According to IEEE Std 421.5, excitation control systems for synchronous generators must maintain voltage regulation under varying load conditions. A particular excitation system design specification requires a settling time of less than 2.5 seconds for a 10% step change in reference voltage, with overshoot not exceeding 20%. If the excitation system is modeled as a second-order system with natural frequency ωₙ = 5 rad/s, what is the minimum damping ratio ζ required to meet the overshoot specification?
(A) ζ ≥ 0.35
(B) ζ ≥ 0.45
(C) ζ ≥ 0.55
(D) ζ ≥ 0.65
Question 5: The table below shows the open-loop frequency response data for a feedback control system at various frequencies. The system has unity feedback (H(s) = 1).

Based on this frequency response data, what is the approximate phase margin of the closed-loop system?
(A) 12°
(B) 15°
(C) 27°
(D) 35°


