Formula Sheet: Process Control


Transfer Functions and Block Diagrams
Laplace Transform Basics
Definition:
\[F(s) = \mathcal{L}\{f(t)\} = \int_0^\infty f(t)e^{-st}dt\]Variables:
- s = complex frequency variable (rad/s or s-1)
- f(t) = time-domain function
- F(s) = Laplace transform of f(t)
Common Laplace Transforms:
- Unit step: \(\mathcal{L}\{1\} = \frac{1}{s}\)
- Ramp: \(\mathcal{L}\{t\} = \frac{1}{s^2}\)
- Exponential: \(\mathcal{L}\{e^{-at}\} = \frac{1}{s+a}\)
- Sine: \(\mathcal{L}\{\sin(\omega t)\} = \frac{\omega}{s^2 + \omega^2}\)
- Cosine: \(\mathcal{L}\{\cos(\omega t)\} = \frac{s}{s^2 + \omega^2}\)
- Derivative: \(\mathcal{L}\left\{\frac{df}{dt}\right\} = sF(s) - f(0)\)
- Integral: \(\mathcal{L}\left\{\int_0^t f(\tau)d\tau\right\} = \frac{F(s)}{s}\)
Transfer Function Definition
\[G(s) = \frac{Y(s)}{U(s)}\]Variables:
- G(s) = transfer function
- Y(s) = Laplace transform of output variable
- U(s) = Laplace transform of input variable
- Assumes zero initial conditions
Block Diagram Algebra
Series (Cascade):
\[G_{total} = G_1 \times G_2 \times G_3 \times ... \times G_n\]Parallel:
\[G_{total} = G_1 + G_2 + G_3 + ... + G_n\]Feedback Loop (Negative Feedback):
\[G_{closed} = \frac{G}{1 + GH}\]- G = forward path transfer function
- H = feedback path transfer function
Feedback Loop (Positive Feedback):
\[G_{closed} = \frac{G}{1 - GH}\]Deviation Variables
\[y'(t) = y(t) - y_s\] \[u'(t) = u(t) - u_s\]Variables:
- y'(t) = output deviation variable
- u'(t) = input deviation variable
- ys = steady-state output value
- us = steady-state input value
First-Order Systems
Standard First-Order Transfer Function
\[G(s) = \frac{K}{\tau s + 1}\]Variables:
- K = process gain (dimensionless or with appropriate units)
- τ = time constant (time units, typically seconds or minutes)
- s = Laplace variable
Step Response of First-Order System
\[y(t) = K A \left(1 - e^{-t/\tau}\right)\]Variables:
- y(t) = output response
- A = magnitude of step input
- K = process gain
- τ = time constant
Key Time Response Characteristics:
- At t = τ: y(τ) = 0.632 KA (63.2% of final value)
- At t = 2τ: y = 0.865 KA (86.5% of final value)
- At t = 3τ: y = 0.950 KA (95.0% of final value)
- At t = 4τ: y = 0.982 KA (98.2% of final value)
- At t = 5τ: y = 0.993 KA (99.3% of final value, essentially settled)
First-Order with Time Delay
\[G(s) = \frac{K e^{-\theta s}}{\tau s + 1}\]Variables:
- θ = time delay or dead time (same units as τ)
- e-θs = dead time element
Step Response:
\[y(t) = \begin{cases} 0 & t < \theta="" \\="" k="" a="" \left(1="" -="" e^{-(t-\theta)/\tau}\right)="" &="" t="" \geq="" \theta="" \end{cases}\]="">Second-Order Systems
Standard Second-Order Transfer Function
\[G(s) = \frac{K\omega_n^2}{s^2 + 2\zeta\omega_n s + \omega_n^2}\]Alternative Form:
\[G(s) = \frac{K}{\tau^2 s^2 + 2\zeta\tau s + 1}\]Variables:
- K = steady-state gain
- ωn = natural frequency (rad/time)
- ζ = damping ratio (dimensionless)
- τ = time constant where τ = 1/ωn
Damping Categories
- Overdamped: ζ > 1 (two real, distinct poles)
- Critically damped: ζ = 1 (two real, equal poles)
- Underdamped: 0 < ζ="">< 1="" (complex="" conjugate="">
- Undamped: ζ = 0 (purely imaginary poles)
Underdamped Step Response
\[y(t) = K A \left[1 - \frac{e^{-\zeta\omega_n t}}{\sqrt{1-\zeta^2}}\sin\left(\omega_d t + \phi\right)\right]\]Where:
\[\omega_d = \omega_n\sqrt{1-\zeta^2}\] \[\phi = \cos^{-1}(\zeta) = \tan^{-1}\left(\frac{\sqrt{1-\zeta^2}}{\zeta}\right)\]Variables:
- ωd = damped natural frequency (rad/time)
- φ = phase angle (radians)
Performance Characteristics (Underdamped)
Percent Overshoot:
\[OS\% = 100 \times e^{-\pi\zeta/\sqrt{1-\zeta^2}}\]Rise Time (0% to 100%):
\[t_r = \frac{\pi - \phi}{\omega_d}\]Peak Time:
\[t_p = \frac{\pi}{\omega_d} = \frac{\pi}{\omega_n\sqrt{1-\zeta^2}}\]Settling Time (2% criterion):
\[t_s = \frac{4}{\zeta\omega_n}\]Settling Time (5% criterion):
\[t_s = \frac{3}{\zeta\omega_n}\]Decay Ratio:
\[DR = e^{-2\pi\zeta/\sqrt{1-\zeta^2}} = (OS\%)^2\]Controller Types and Equations
Proportional (P) Controller
Time Domain:
\[u(t) = K_c e(t) + \bar{u}\]Deviation Form:
\[u'(t) = K_c e(t)\]Transfer Function:
\[G_c(s) = K_c\]Variables:
- u(t) = controller output (manipulated variable)
- e(t) = error = ysp - y (setpoint - measurement)
- Kc = controller gain (dimensionless or %-to-% typically)
- ū = bias or steady-state output
Proportional-Integral (PI) Controller
Time Domain:
\[u(t) = K_c\left[e(t) + \frac{1}{\tau_I}\int_0^t e(t')dt'\right] + \bar{u}\]Transfer Function:
\[G_c(s) = K_c\left(1 + \frac{1}{\tau_I s}\right) = K_c\frac{\tau_I s + 1}{\tau_I s}\]Alternative Form (using reset rate):
\[G_c(s) = K_c\left(1 + \frac{K_I}{s}\right)\]Variables:
- τI = integral time or reset time (time units)
- KI = integral gain = 1/τI (1/time)
Proportional-Derivative (PD) Controller
Time Domain:
\[u(t) = K_c\left[e(t) + \tau_D\frac{de(t)}{dt}\right] + \bar{u}\]Transfer Function (Ideal):
\[G_c(s) = K_c(1 + \tau_D s)\]Transfer Function (Real/Practical with Filter):
\[G_c(s) = K_c\left(1 + \frac{\tau_D s}{\alpha\tau_D s + 1}\right)\]Variables:
- τD = derivative time (time units)
- α = derivative filter constant (typically 0.05 to 0.2)
Proportional-Integral-Derivative (PID) Controller
Time Domain (Ideal):
\[u(t) = K_c\left[e(t) + \frac{1}{\tau_I}\int_0^t e(t')dt' + \tau_D\frac{de(t)}{dt}\right] + \bar{u}\]Transfer Function (Ideal):
\[G_c(s) = K_c\left(1 + \frac{1}{\tau_I s} + \tau_D s\right)\]Transfer Function (Series/Interacting Form):
\[G_c(s) = K_c'\left(1 + \frac{1}{\tau_I' s}\right)(1 + \tau_D' s)\]Transfer Function (Parallel Form):
\[G_c(s) = K_p + \frac{K_I}{s} + K_D s\]Relationships:
- Kp = Kc
- KI = Kc/τI
- KD = KcτD
Controller Action: Direct vs. Reverse
Direct (Positive) Action:
- Controller output increases when measurement increases
- e = ysp - y
Reverse (Negative) Action:
- Controller output decreases when measurement increases
- e = y - ysp or use negative Kc
Closed-Loop Control System Analysis
Standard Feedback Control Loop
Closed-Loop Transfer Function (Servo Response):
\[\frac{Y(s)}{Y_{sp}(s)} = \frac{G_c G_v G_p G_m}{1 + G_c G_v G_p G_m}\]Disturbance Response (Regulatory Response):
\[\frac{Y(s)}{D(s)} = \frac{G_d}{1 + G_c G_v G_p G_m}\]Variables:
- Gc = controller transfer function
- Gv = final control element (valve) transfer function
- Gp = process transfer function
- Gm = measurement/sensor transfer function
- Gd = disturbance transfer function
- Ysp = setpoint
- D = disturbance
Open-Loop Transfer Function
\[G_{OL}(s) = G_c G_v G_p G_m\]Note: Often Gv and Gm are assumed to be 1 (unity) for simplicity.
Characteristic Equation
\[1 + G_{OL}(s) = 0\]The roots of this equation are the closed-loop poles which determine stability.
Offset (Steady-State Error)
Final Value Theorem:
\[e_{ss} = \lim_{t \to \infty} e(t) = \lim_{s \to 0} s E(s)\]For P-only Control with Unit Step Setpoint Change:
\[e_{ss} = \frac{1}{1 + K_c K_p}\]Variables:
- ess = steady-state error (offset)
- Kp = process steady-state gain
Note: PI and PID controllers eliminate offset for step changes in setpoint or load (integral action).
Stability Analysis
Routh-Hurwitz Stability Criterion
General Characteristic Equation:
\[a_n s^n + a_{n-1} s^{n-1} + ... + a_1 s + a_0 = 0\]Routh Array Construction:
- First row: an, an-2, an-4, ...
- Second row: an-1, an-3, an-5, ...
- Subsequent rows calculated using determinant formula
Stability Criterion:
- System is stable if all elements in the first column of the Routh array have the same sign (positive)
- Number of sign changes in first column = number of roots with positive real parts
Bode Stability Criterion
Gain Margin (GM):
\[GM = \frac{1}{|G_{OL}(j\omega_{pc})|}\] \[GM_{dB} = -20\log_{10}|G_{OL}(j\omega_{pc})|\]Phase Margin (PM):
\[PM = 180° + \angle G_{OL}(j\omega_{gc})\]Variables:
- ωpc = phase crossover frequency (where phase = -180°)
- ωgc = gain crossover frequency (where |GOL| = 1 or 0 dB)
Stability Conditions:
- For stability: GM > 1 (or GMdB > 0) and PM > 0°
- Typical design targets: GM > 1.7 (5 dB), PM > 30° to 45°
Ultimate Gain and Period
Ultimate Gain (Ku):
- Controller gain at which system becomes marginally stable (sustained oscillations)
- Related to gain margin: Ku = Kc × GM
Ultimate Period (Pu):
\[P_u = \frac{2\pi}{\omega_{pc}}\]- Pu = period of sustained oscillations at Ku
- ωpc = frequency at which phase angle = -180°
Controller Tuning Methods
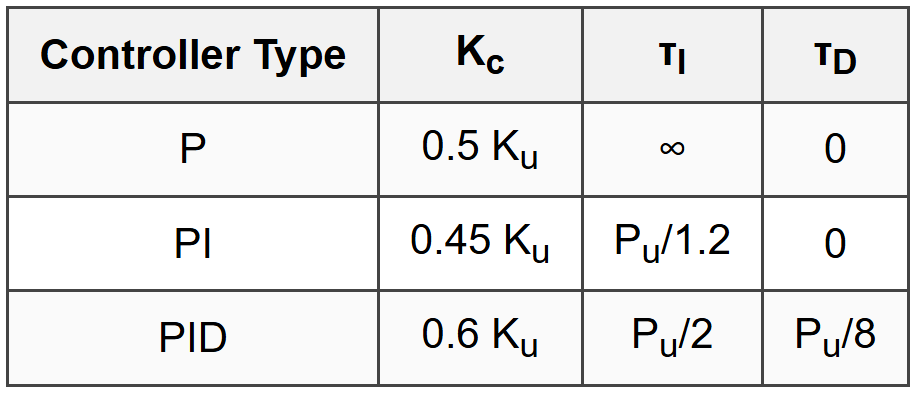
Ziegler-Nichols Closed-Loop (Ultimate Gain) Method
Procedure:
- Use P-only control, increase Kc until sustained oscillations occur
- Record ultimate gain Ku and ultimate period Pu
Tuning Parameters:
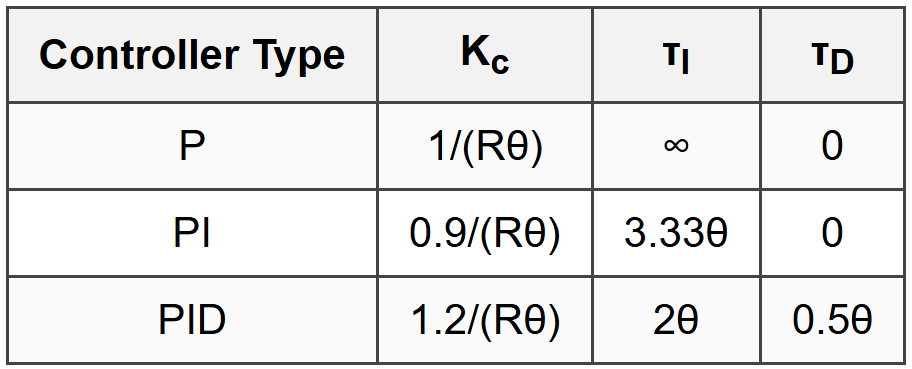
Ziegler-Nichols Open-Loop (Process Reaction Curve) Method
Procedure:
- Apply step change to process in open loop
- Draw tangent line at maximum slope of response curve
- Determine dead time θ and time constant τ from tangent intercepts
- Calculate R = ΔY/(Δu × τ) where ΔY/Δu is normalized process gain
Tuning Parameters:
Variables:
- R = reaction rate = slope at inflection point / (process gain)
- θ = apparent dead time (time units)
- τ = apparent time constant (time units)
Cohen-Coon Tuning Method
Based on same process parameters as Z-N open-loop (θ, τ, Kp):
\[\tau_0 = \frac{\theta}{\tau}\]Tuning Parameters:
P Controller:
\[K_c = \frac{\tau}{K_p\theta}\left(1 + \frac{\tau_0}{3}\right)\]PI Controller:
\[K_c = \frac{\tau}{K_p\theta}\left(0.9 + \frac{\tau_0}{12}\right)\] \[\tau_I = \theta\frac{30 + 3\tau_0}{9 + 20\tau_0}\]PID Controller:
\[K_c = \frac{\tau}{K_p\theta}\left(\frac{4}{3} + \frac{\tau_0}{4}\right)\] \[\tau_I = \theta\frac{32 + 6\tau_0}{13 + 8\tau_0}\] \[\tau_D = \theta\frac{4}{11 + 2\tau_0}\]ITAE (Integral of Time-Weighted Absolute Error) Tuning
For First-Order Plus Dead Time (FOPDT) Process:
PI Controller (Disturbance Rejection):
\[K_c = \frac{0.859}{K_p}\left(\frac{\theta}{\tau}\right)^{-0.977}\] \[\tau_I = \frac{\tau}{0.674}\left(\frac{\theta}{\tau}\right)^{-0.680}\]PID Controller (Disturbance Rejection):
\[K_c = \frac{1.357}{K_p}\left(\frac{\theta}{\tau}\right)^{-0.947}\] \[\tau_I = \frac{\tau}{0.842}\left(\frac{\theta}{\tau}\right)^{-0.738}\] \[\tau_D = 0.381\tau\left(\frac{\theta}{\tau}\right)^{0.995}\]IMC (Internal Model Control) Tuning
For FOPDT Process:
PI Controller:
\[K_c = \frac{\tau}{K_p(\lambda + \theta)}\] \[\tau_I = \tau\]PID Controller:
\[K_c = \frac{\tau}{K_p\lambda}\] \[\tau_I = \tau\] \[\tau_D = 0\]Variables:
- λ = IMC filter time constant (tuning parameter, typically λ = θ to 2θ)
- Smaller λ gives faster, more aggressive control
- Larger λ gives slower, more conservative control
Frequency Response
Frequency Response Function
\[G(j\omega) = |G(j\omega)|e^{j\phi(\omega)}\]Magnitude:
\[|G(j\omega)| = \sqrt{[\text{Re}(G(j\omega))]^2 + [\text{Im}(G(j\omega))]^2}\]Phase Angle:
\[\phi(\omega) = \tan^{-1}\left(\frac{\text{Im}(G(j\omega))}{\text{Re}(G(j\omega))}\right)\]In Decibels:
\[|G(j\omega)|_{dB} = 20\log_{10}|G(j\omega)|\]First-Order System Frequency Response
\[G(j\omega) = \frac{K}{j\omega\tau + 1}\]Magnitude:
\[|G(j\omega)| = \frac{K}{\sqrt{1 + (\omega\tau)^2}}\]Phase:
\[\phi(\omega) = -\tan^{-1}(\omega\tau)\]At Corner Frequency (ω = 1/τ):
- |G(jω)| = K/√2 = 0.707K
- |G(jω)|dB = -3 dB (relative to K)
- φ = -45°
Second-Order System Frequency Response
\[G(j\omega) = \frac{K\omega_n^2}{-\omega^2 + 2j\zeta\omega_n\omega + \omega_n^2}\]Magnitude:
\[|G(j\omega)| = \frac{K\omega_n^2}{\sqrt{(\omega_n^2 - \omega^2)^2 + (2\zeta\omega_n\omega)^2}}\]Phase:
\[\phi(\omega) = -\tan^{-1}\left(\frac{2\zeta\omega_n\omega}{\omega_n^2 - \omega^2}\right)\]Resonant Peak (for ζ <>
\[M_r = \frac{K}{2\zeta\sqrt{1-\zeta^2}}\]Resonant Frequency:
\[\omega_r = \omega_n\sqrt{1 - 2\zeta^2}\]Bode Plot Asymptotes
Gain (K):
- Magnitude: 20log10K (constant horizontal line)
- Phase: 0°
Integrator (1/s):
- Slope: -20 dB/decade
- Phase: -90° (constant)
Differentiator (s):
- Slope: +20 dB/decade
- Phase: +90° (constant)
First-Order Lag (1/(τs + 1)):
- Low frequency (ω < 1/τ):="" 0="">
- High frequency (ω >> 1/τ): -20 dB/decade
- Corner frequency: ω = 1/τ
- Phase: 0° to -90°
First-Order Lead (τs + 1):
- Low frequency: 0 dB/decade
- High frequency: +20 dB/decade
- Corner frequency: ω = 1/τ
- Phase: 0° to +90°
Second-Order System:
- Low frequency: 0 dB/decade
- High frequency: -40 dB/decade
- Corner frequency: ω = ωn
- Phase: 0° to -180°
Dead Time (e-θs):
- Magnitude: |G(jω)| = 1 (0 dB) for all frequencies
- Phase: φ(ω) = -θω (radians), linear decrease with frequency
Advanced Control Strategies
Cascade Control
Structure:
- Primary (master) controller output becomes setpoint for secondary (slave) controller
- Inner loop responds faster than outer loop
Overall Transfer Function:
\[\frac{Y_1(s)}{Y_{sp,1}(s)} = \frac{G_{c1}G_{c2}G_{p1}G_{p2}}{1 + G_{c2}G_{p2} + G_{c1}G_{c2}G_{p1}G_{p2}}\]Variables:
- Gc1 = primary controller
- Gc2 = secondary controller
- Gp1 = primary process
- Gp2 = secondary process
Design Guidelines:
- Tune secondary loop first (with primary on manual)
- Then tune primary loop
- Secondary loop should be 3-10 times faster than primary
Feedforward Control
Ideal Feedforward Controller:
\[G_{FF}(s) = -\frac{G_d(s)}{G_p(s)}\]Variables:
- GFF = feedforward controller transfer function
- Gd = disturbance-to-output transfer function
- Gp = manipulated variable-to-output transfer function
Combined Feedforward-Feedback Output:
\[u(t) = u_{FF}(t) + u_{FB}(t)\]Lead-Lag Feedforward Controller:
\[G_{FF}(s) = K_{FF}\frac{\tau_1 s + 1}{\tau_2 s + 1}\]Ratio Control
Flow Ratio:
\[R = \frac{F_B}{F_A}\]Controller Output:
\[F_{B,sp} = R \times F_A\]Variables:
- FA = wild (uncontrolled) flow rate
- FB = controlled flow rate
- R = desired ratio
Split-Range Control
One controller output signal operates two or more final control elements over different ranges:
- Valve 1 operates: 0-50% controller output
- Valve 2 operates: 50-100% controller output
Override (Selective) Control
Low Select:
\[u = \min(u_1, u_2, ..., u_n)\]High Select:
\[u = \max(u_1, u_2, ..., u_n)\]Used for constraint control and safety limits.
Decoupling Control (Multivariable Systems)
For 2×2 System:
\[Y_1(s) = G_{11}(s)U_1(s) + G_{12}(s)U_2(s)\] \[Y_2(s) = G_{21}(s)U_1(s) + G_{22}(s)U_2(s)\]Ideal Decoupler:
\[D_{12}(s) = -\frac{G_{12}(s)}{G_{11}(s)}\] \[D_{21}(s) = -\frac{G_{21}(s)}{G_{22}(s)}\]Variables:
- Gij = transfer function from input j to output i
- Dij = decoupler from loop j to loop i
Control Valve Characteristics
Valve Sizing Equation
Liquid Flow (Incompressible):
\[Q = C_v\sqrt{\frac{\Delta P}{SG}}\]Variables:
- Q = flow rate (gpm for US units)
- Cv = valve flow coefficient (gpm/psi0.5)
- ΔP = pressure drop across valve (psi)
- SG = specific gravity (dimensionless, water = 1.0)
Gas Flow (for ΔP/P1 <>
\[Q = C_v\sqrt{\frac{1360 \Delta P P_1}{SG_g T}}\]Variables:
- Q = flow rate (scfh, standard ft³/hr)
- P1 = upstream pressure (psia)
- SGg = gas specific gravity (air = 1.0)
- T = absolute temperature (°R = °F + 460)
Valve Characteristics
Linear:
\[F = x\]- Flow proportional to valve position
Equal Percentage:
\[F = R^{x-1}\]- R = rangeability (typically 20-50)
- x = fraction of valve opening (0 to 1)
- Equal percentage change in flow per equal percentage change in valve position
Quick Opening:
\[F = \sqrt{x}\]- Maximum change near closed position
Installed Valve Gain
\[K_v = \frac{dQ}{dx}\]At Operating Point:
\[K_v = \frac{Q_{max} - Q_{min}}{x_{max} - x_{min}}\]Variables:
- Kv = valve gain
- Q = flow rate
- x = valve position (typically % open)
Sensor and Transmitter Dynamics
First-Order Sensor
\[G_m(s) = \frac{K_m}{\tau_m s + 1}\]Variables:
- Km = measurement gain (typically 1 for 4-20 mA signal)
- τm = sensor time constant
Thermocouple/RTD Time Constant
\[\tau_s = \frac{mc_p}{hA}\]Variables:
- m = mass of sensor element
- cp = specific heat of sensor
- h = heat transfer coefficient
- A = surface area of sensor
Transmitter Span and Zero
Output Signal:
\[I = I_{min} + \frac{I_{max} - I_{min}}{PV_{max} - PV_{min}}(PV - PV_{min})\]For 4-20 mA Standard:
\[I = 4 + \frac{16}{PV_{max} - PV_{min}}(PV - PV_{min})\]Variables:
- I = output current (mA)
- PV = process variable
- PVmin = lower range value (LRV)
- PVmax = upper range value (URV)
Digital Control
Discrete PID Algorithms
Position Form:
\[u_k = K_c\left[e_k + \frac{\Delta t}{\tau_I}\sum_{i=0}^k e_i + \frac{\tau_D}{\Delta t}(e_k - e_{k-1})\right]\]Velocity Form:
\[u_k = u_{k-1} + \Delta u_k\] \[\Delta u_k = K_c\left[(e_k - e_{k-1}) + \frac{\Delta t}{\tau_I}e_k + \frac{\tau_D}{\Delta t}(e_k - 2e_{k-1} + e_{k-2})\right]\]Variables:
- uk = controller output at sample k
- ek = error at sample k
- Δt = sampling interval
Sampling Theorem
Nyquist Criterion:
\[f_s \geq 2f_{max}\]Practical Guideline:
\[\Delta t \leq \frac{\tau}{10} \text{ to } \frac{\tau}{20}\]Variables:
- fs = sampling frequency
- fmax = highest frequency component of interest
- Δt = sampling period
- τ = dominant process time constant
Anti-Windup (Integral Windup Prevention)
Clamping Method:
- Stop integral action when controller output saturates
- Resume when error changes sign or output unsaturates
Back-Calculation Method:
\[\frac{dI}{dt} = \frac{1}{\tau_I}e + \frac{1}{\tau_w}(u_{sat} - u)\]Variables:
- I = integral term
- τw = windup time constant
- usat = saturated output value
- u = calculated output value
Process Identification
First-Order Plus Dead Time (FOPDT) Model from Step Test
\[G(s) = \frac{K_p e^{-\theta s}}{\tau s + 1}\]Process Gain:
\[K_p = \frac{\Delta Y}{\Delta U}\]Time Constant (from 63.2% method):
- τ = time to reach 63.2% of final value (after dead time)
Dead Time (θ):
- Time from step input to initial response
Alternative (Two-Point Method):
- Find times t1 and t2 where response reaches 28.3% and 63.2%
- τ = 1.5(t2 - t1)
- θ = t2 - τ
Smith Predictor
Controller Structure (for processes with large dead time):
\[G_c(s) = \frac{G_{PI}(s)}{1 + G_{PI}(s)G_p(s)(1 - e^{-\theta s})}\]Variables:
- GPI = PI controller
- Gp = process model (without dead time)
- θ = process dead time
Performance Indices
Integral Error Criteria
Integral of Absolute Error (IAE):
\[IAE = \int_0^\infty |e(t)|dt\]Integral of Squared Error (ISE):
\[ISE = \int_0^\infty e^2(t)dt\]Integral of Time-weighted Absolute Error (ITAE):
\[ITAE = \int_0^\infty t|e(t)|dt\]Integral of Time-weighted Squared Error (ITSE):
\[ITSE = \int_0^\infty te^2(t)dt\]Note: Lower values indicate better performance. ITAE penalizes errors that persist over long times.
Root Locus
Root Locus Rules
Number of Branches:
- Equal to number of poles of open-loop transfer function
Starting Points (K = 0):
- Open-loop poles
Ending Points (K → ∞):
- Open-loop zeros or infinity
Real Axis Segments:
- Root locus exists on real axis to left of odd number of real poles and zeros
Asymptotes:
\[\theta_a = \frac{(2k+1)180°}{n-m}\]- n = number of poles
- m = number of zeros
- k = 0, 1, 2, ..., (n-m-1)
Centroid (Asymptote Intersection):
\[\sigma_a = \frac{\sum \text{poles} - \sum \text{zeros}}{n - m}\]Breakaway/Break-in Points:
- Solve: \(\frac{dK}{ds} = 0\)
Angle Criterion:
\[\sum \angle(\text{zeros}) - \sum \angle(\text{poles}) = (2k+1)180°\]State-Space Representation
State-Space Model
State Equation:
\[\dot{x} = Ax + Bu\]Output Equation:
\[y = Cx + Du\]Variables:
- x = state vector (n × 1)
- u = input vector (m × 1)
- y = output vector (p × 1)
- A = state matrix (n × n)
- B = input matrix (n × m)
- C = output matrix (p × n)
- D = feedthrough matrix (p × m)
Transfer Function from State-Space
\[G(s) = C(sI - A)^{-1}B + D\]Variables:
- I = identity matrix
Controllability and Observability
Controllability Matrix:
\[\mathcal{C} = [B \quad AB \quad A^2B \quad ... \quad A^{n-1}B]\]System is controllable if rank(𝒞) = n
Observability Matrix:
\[\mathcal{O} = \begin{bmatrix} C \\ CA \\ CA^2 \\ \vdots \\ CA^{n-1} \end{bmatrix}\]System is observable if rank(𝒪) = n


