PE Exam Exam > PE Exam Notes > Electrical & Computer Engineering for PE > Cheatsheet: Feedback Systems
Cheatsheet: Feedback Systems


1. Feedback System Fundamentals
1.1 Basic Definitions

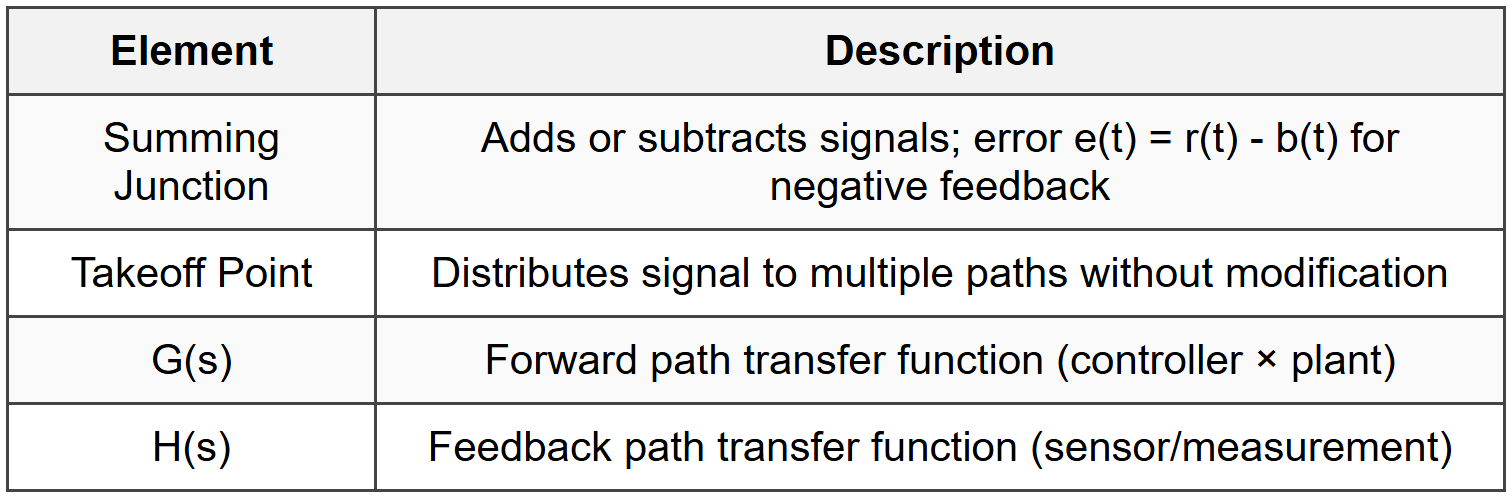
1.2 Block Diagram Components
1.3 Standard Feedback Configuration
- Closed-loop transfer function: T(s) = C(s)/R(s) = G(s)/(1 + G(s)H(s))
- Error transfer function: E(s)/R(s) = 1/(1 + G(s)H(s))
- Open-loop transfer function: L(s) = G(s)H(s)
- Characteristic equation: 1 + G(s)H(s) = 0
- For unity feedback (H(s) = 1): T(s) = G(s)/(1 + G(s))
2. Block Diagram Algebra
2.1 Series Connection
- Equivalent transfer function: G(s) = G₁(s) × G₂(s) × ... × Gₙ(s)
- Output of first block becomes input to second block
2.2 Parallel Connection
- Equivalent transfer function: G(s) = G₁(s) ± G₂(s) ± ... ± Gₙ(s)
- Same input applied to all blocks; outputs summed algebraically
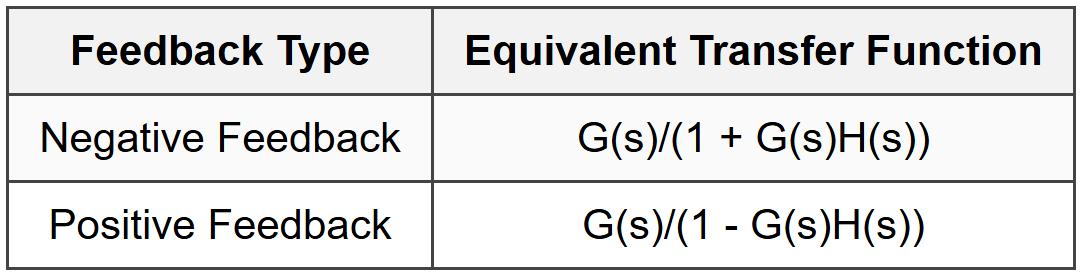
2.3 Feedback Loop Reduction
2.4 Moving Summing Junctions and Takeoff Points
- Moving summing junction past block G(s): add 1/G(s) or G(s) to maintain equivalence
- Moving takeoff point past block G(s): add G(s) or 1/G(s) in branch to maintain equivalence
- Summing junctions in series can be combined by algebraic addition
- Adjacent takeoff points can be interchanged without affecting system
3. Signal Flow Graphs
3.1 Signal Flow Graph Elements

3.2 Mason's Gain Formula
- Transfer function: T = (1/Δ) × Σ(Pₖ × Δₖ), summed over all k forward paths
- Δ = 1 - Σ(individual loops) + Σ(2 non-touching loops) - Σ(3 non-touching loops) + ...
- Pₖ = path gain of kth forward path (product of all branch gains in path)
- Δₖ = cofactor of Δ for kth path (Δ with loops touching kth path removed)
- Non-touching loops: loops that share no common nodes
3.3 Mason's Formula Application Steps
- Identify all forward paths and calculate path gains Pₖ
- Identify all individual loops and calculate loop gains
- Identify all combinations of 2, 3,... non-touching loops
- Calculate Δ using loop gains
- For each forward path, determine Δₖ by removing loops touching that path
- Apply Mason's formula: T = (1/Δ) × Σ(Pₖ × Δₖ)
4. System Types and Steady-State Error
4.1 System Type Classification
- System type N = number of pure integrators (poles at s = 0) in open-loop transfer function G(s)H(s)
- Type 0: No poles at origin (N = 0)
- Type 1: One pole at origin (N = 1)
- Type 2: Two poles at origin (N = 2)
- Higher type number indicates better steady-state accuracy
4.2 Static Error Constants

4.3 Steady-State Error Formulas
4.3.1 For Unity Feedback (H(s) = 1)
- e_ss = lim(s→0) s × E(s) where E(s) = R(s)/(1 + G(s))
- Step input (r(t) = A): e_ss = A/(1 + Kₚ)
- Ramp input (r(t) = At): e_ss = A/Kᵥ
- Parabolic input (r(t) = At²/2): e_ss = A/Kₐ
4.4 Steady-State Error by System Type

5. Stability Analysis
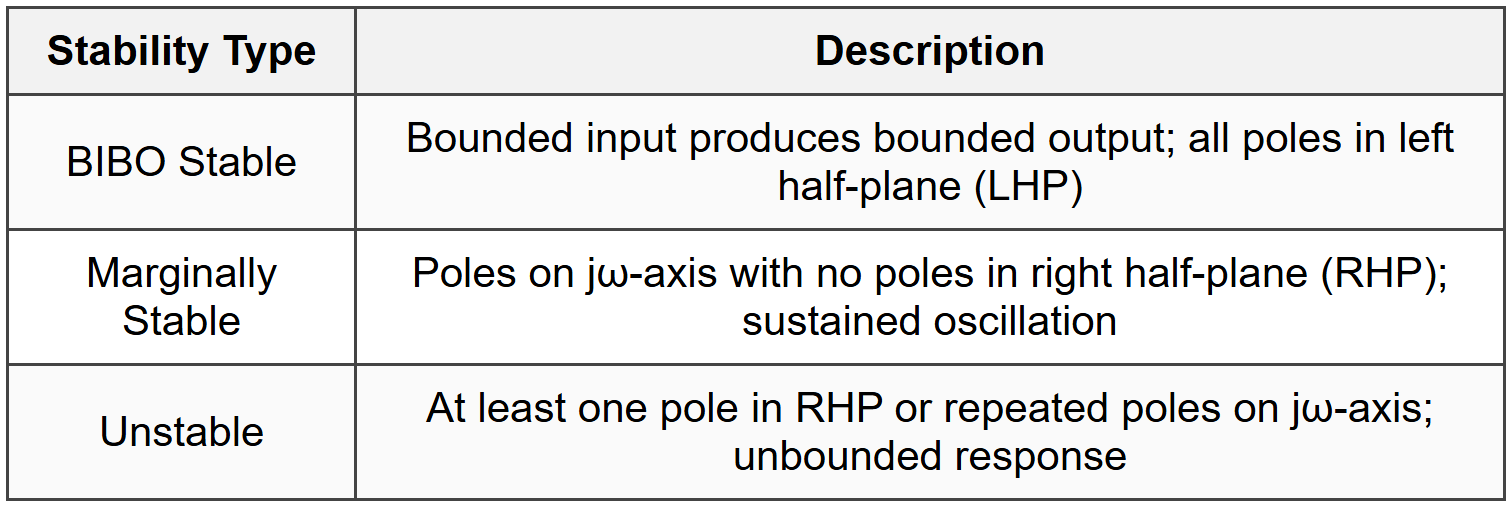
5.1 Stability Definitions
5.2 Routh-Hurwitz Stability Criterion
5.2.1 Standard Routh Array Construction
- Characteristic equation: aₙsⁿ + aₙ₋₁sⁿ⁻¹ + ... + a₁s + a₀ = 0
- First row: aₙ, aₙ₋₂, aₙ₋₄, ...
- Second row: aₙ₋₁, aₙ₋₃, aₙ₋₅, ...
- Subsequent rows: b₁ = (aₙ₋₁×aₙ₋₂ - aₙ×aₙ₋₃)/aₙ₋₁
- Number of RHP poles = number of sign changes in first column
- System stable if all elements in first column are positive (no sign changes)
5.2.2 Special Cases
- Zero in first column (other elements non-zero): replace zero with small ε > 0, complete array, take limit as ε → 0⁺
- Entire row of zeros: indicates symmetric roots; form auxiliary equation from previous row, differentiate, use coefficients for next row
- Auxiliary equation roots are also roots of characteristic equation
5.3 Relative Stability
- Gain margin (GM): factor by which gain can increase before instability
- Phase margin (PM): additional phase lag at gain crossover before instability
- Damping ratio ζ relates to phase margin: PM ≈ 100ζ degrees (for 0.4 < ζ=""><>
6. Root Locus Analysis
6.1 Root Locus Fundamentals
- Root locus: plot of closed-loop poles as gain K varies from 0 to ∞
- Characteristic equation: 1 + KG(s)H(s) = 0 or KG(s)H(s) = -1
- Angle condition: ∠G(s)H(s) = ±180°(2k + 1), k = 0, 1, 2, ...
- Magnitude condition: |KG(s)H(s)| = 1
- Number of branches = number of poles of G(s)H(s)
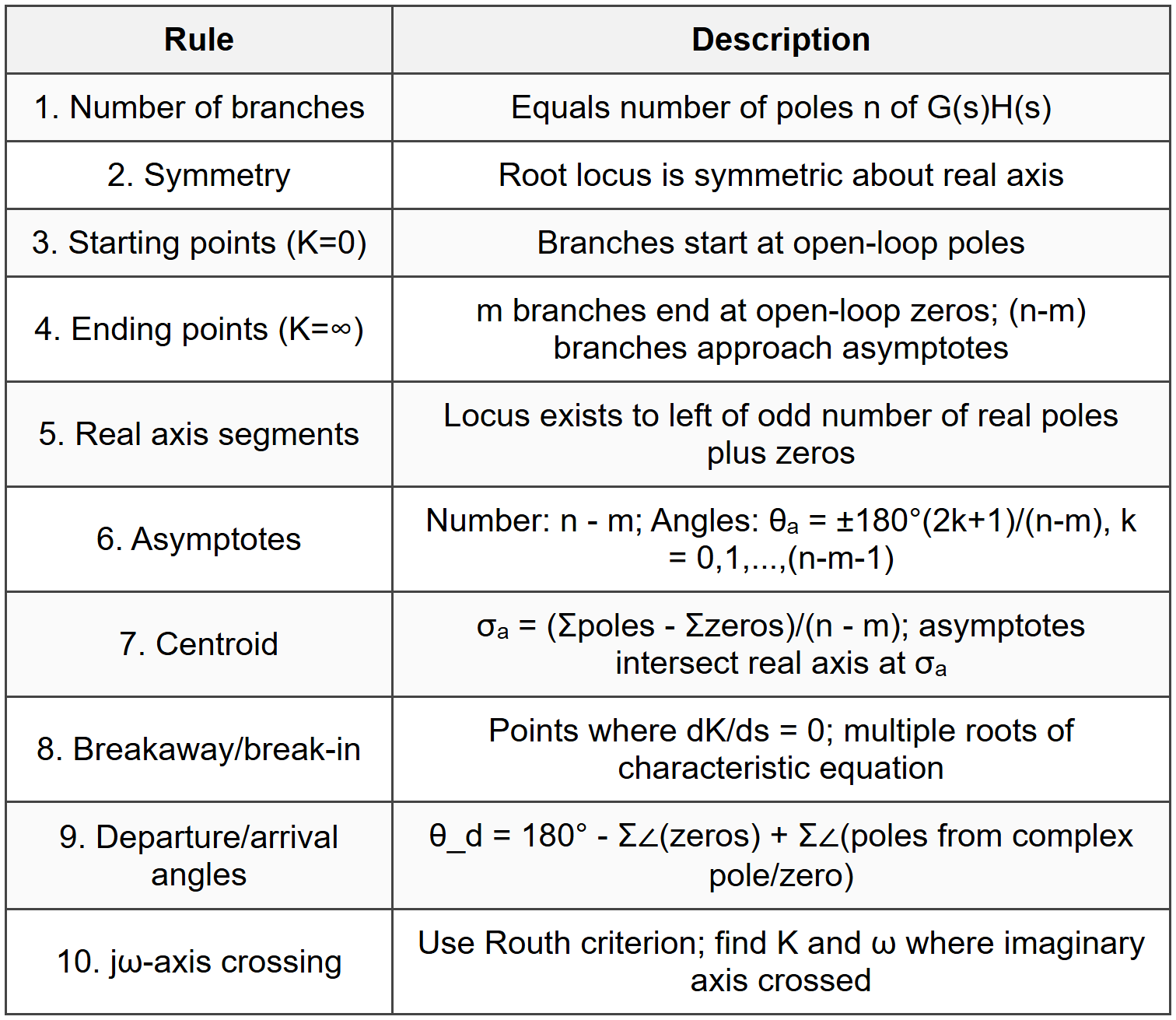
6.2 Root Locus Construction Rules
6.3 Key Root Locus Calculations
- Gain at any point s₁: K = 1/|G(s₁)H(s₁)| = ∏|s₁ - poles|/∏|s₁ - zeros|
- Breakaway points on real axis: solve dK/ds = 0 or d[G(s)H(s)]/ds = 0
- Damping ratio from root location: ζ = cos(θ) where θ = angle from positive real axis
7. Frequency Response Analysis
7.1 Frequency Response Basics
- Frequency response: steady-state output of stable system to sinusoidal input
- Input: r(t) = A sin(ωt); Output: c(t) = A|G(jω)| sin(ωt + ∠G(jω))
- Magnitude ratio: M(ω) = |G(jω)| = |C(jω)|/|R(jω)|
- Phase angle: φ(ω) = ∠G(jω)
- Decibel: M_dB = 20 log₁₀|G(jω)|
7.2 Bode Plot Construction
7.2.1 Standard Transfer Function Form
- G(jω) = K(1+jωT₁)(1+jωT₂)... / [(jω)ᴺ(1+jωTₐ)(1+jωTᵦ)...]
- Plot magnitude (dB) and phase (degrees) vs. log frequency
7.2.2 Basic Factor Contributions

7.2.3 Second-Order Factor Details
- Resonant peak: M_r = 1/(2ζ√(1-ζ²)) for ζ <>
- Resonant frequency: ω_r = ωₙ√(1-2ζ²) for ζ <>
- Corner frequency = ωₙ
7.3 Gain and Phase Margins from Bode Plot

- Stable system: GM > 1 (GM_dB > 0) and PM > 0°
- Typical specs: GM > 6 dB, PM > 30° to 60°
7.4 Nyquist Plot
7.4.1 Nyquist Plot Basics
- Polar plot of G(jω)H(jω) for -∞ < ω=""><>
- Real part = Re[G(jω)H(jω)]; Imaginary part = Im[G(jω)H(jω)]
- Magnitude = |G(jω)H(jω)|; Angle = ∠G(jω)H(jω)
7.4.2 Nyquist Stability Criterion
- Nyquist contour: encloses entire RHP in s-plane
- Z = N + P where Z = closed-loop RHP poles, P = open-loop RHP poles, N = net encirclements of -1 point
- For stability: Z = 0, so N = -P
- If P = 0 (open-loop stable): no encirclements of -1 point for closed-loop stability
- Clockwise encirclement counted as positive N
7.4.3 Gain and Phase Margins from Nyquist
- GM: reciprocal of magnitude where plot crosses negative real axis
- PM: angle from negative real axis to point where |G(jω)H(jω)| = 1
8. Time Domain Specifications
8.1 Standard Second-Order System
- Transfer function: T(s) = ωₙ²/(s² + 2ζωₙs + ωₙ²)
- ωₙ = undamped natural frequency (rad/s)
- ζ = damping ratio (dimensionless)
- Poles: s = -ζωₙ ± jωₙ√(1-ζ²)
8.2 Step Response Performance Specifications

8.3 Damping Ratio Effects
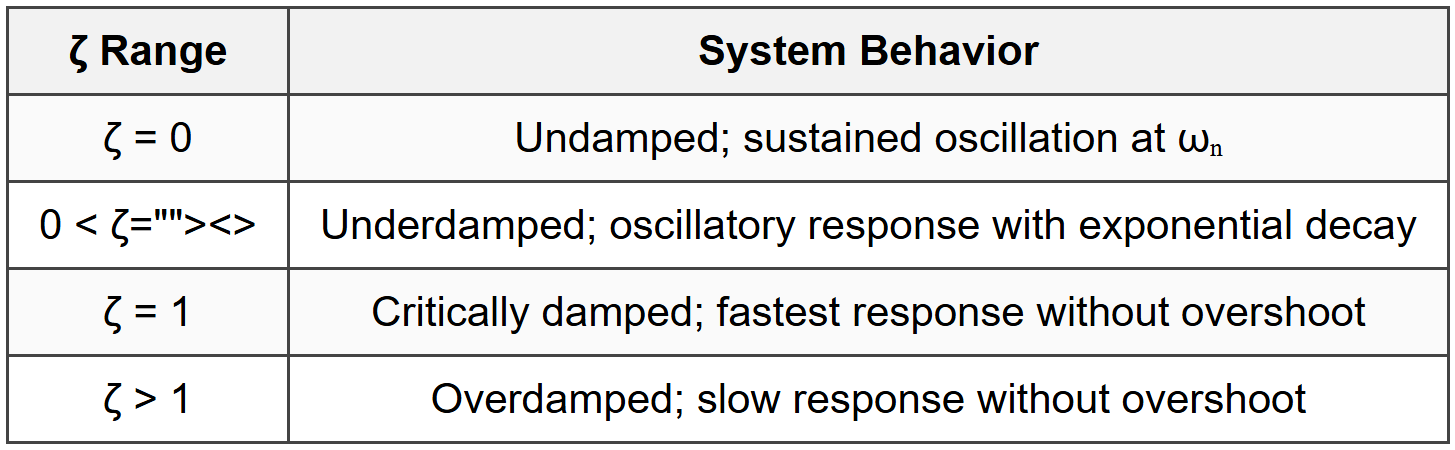
8.4 Dominant Pole Approximation
- Poles at least 5 times closer to jω-axis than other poles dominate response
- Higher-order system approximated by second-order dominant poles
- Valid when distant poles and zeros cancel or are far into LHP
9. Compensator Design
9.1 Compensator Types

9.2 PID Controller Effects

9.3 Lead Compensator Design
- Purpose: improve transient response and increase phase margin
- Maximum phase lead: φ_max = sin⁻¹((1-α)/(1+α)) at ω_m = 1/(T√α)
- Place ω_m at new gain crossover frequency
- Lead adds positive phase (phase lead) between 1/T and 1/(αT)
- Magnitude increases with frequency; select K to achieve 0 dB at ω_m
9.4 Lag Compensator Design
- Purpose: improve steady-state error without affecting transient response
- Increases low-frequency gain by factor β
- Corner frequencies 1/T and 1/(βT) placed well below gain crossover
- Phase lag effect minimized at gain crossover
- Select β to achieve desired error constant improvement
9.5 Compensator Selection Guide
- Use lead if transient response inadequate (low PM, high overshoot)
- Use lag if steady-state error too large but transient acceptable
- Use lead-lag if both transient and steady-state need improvement
- Use PID for general-purpose control with tunable parameters
10. State-Space Representation
10.1 State-Space Equations
- State equation: ẋ(t) = Ax(t) + Bu(t)
- Output equation: y(t) = Cx(t) + Du(t)
- x(t) = state vector (n×1); u(t) = input vector (r×1); y(t) = output vector (m×1)
- A = system matrix (n×n); B = input matrix (n×r); C = output matrix (m×n); D = feedthrough matrix (m×r)
10.2 Transfer Function from State-Space
- T(s) = C(sI - A)⁻¹B + D
- Characteristic equation: det(sI - A) = 0
- Eigenvalues of A are poles of transfer function
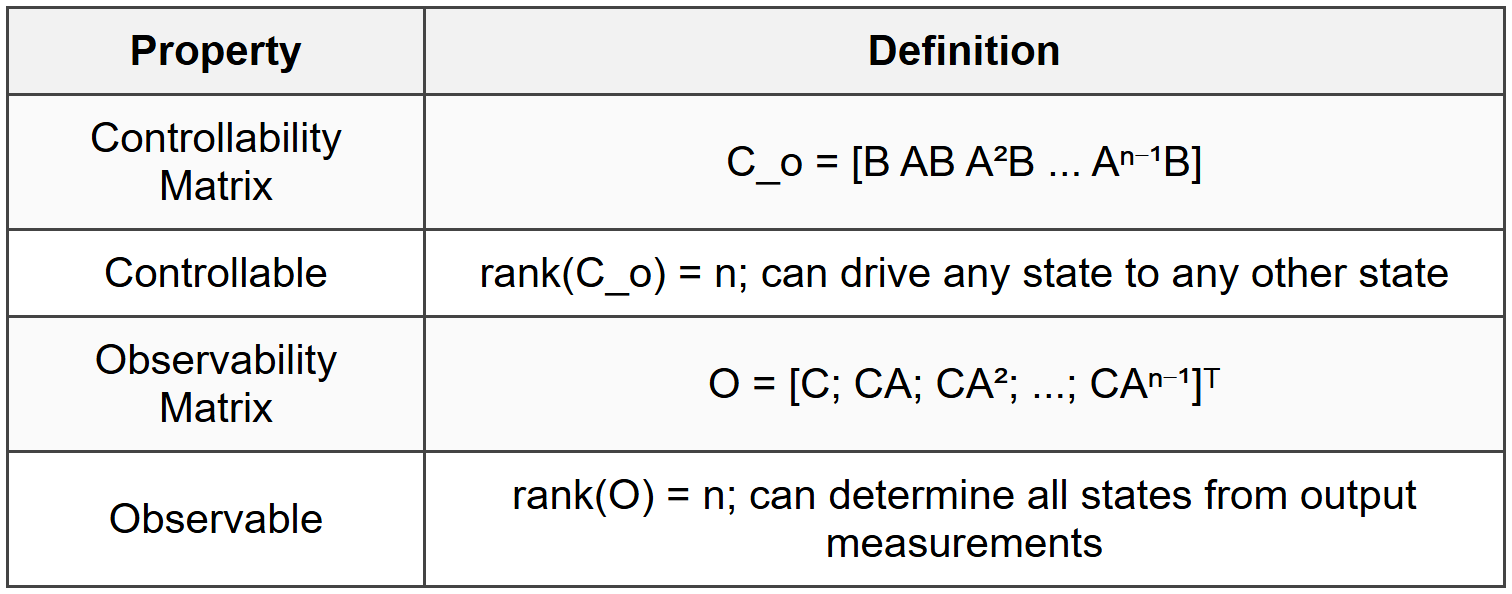
10.3 Controllability and Observability
10.4 State Feedback Control
- Control law: u(t) = -Kx(t) + r(t) where K is feedback gain matrix
- Closed-loop system: ẋ(t) = (A - BK)x(t) + Br(t)
- Pole placement: select K to place eigenvalues of (A - BK) at desired locations
- Requires full state feedback and system must be controllable
10.5 Observer Design
- State observer: estimates unmeasured states from input and output
- Observer equation: ˙x̂(t) = Ax̂(t) + Bu(t) + L(y(t) - Cx̂(t))
- L = observer gain matrix
- Error dynamics: ė(t) = (A - LC)e(t) where e = x - x̂
- Select L to place eigenvalues of (A - LC) at desired locations
- Requires system to be observable
The document Cheatsheet: Feedback Systems is a part of the PE Exam Course Electrical & Computer Engineering for PE.
All you need of PE Exam at this link: PE Exam
About this Document

Apr 20, 2026 Last updated
Related Exams
Document Description: Cheatsheet: Feedback Systems for PE Exam 2026 is part of Electrical & Computer Engineering for PE preparation. The notes and questions for Cheatsheet: Feedback Systems have been prepared according to the PE Exam exam syllabus. Information about Cheatsheet: Feedback Systems covers topics like and Cheatsheet: Feedback Systems Example, for PE Exam 2026 Exam. Find important definitions, questions, notes, meanings, examples, exercises and tests below for Cheatsheet: Feedback Systems.
Introduction of Cheatsheet: Feedback Systems in English is available as part of our Electrical & Computer Engineering for PE for PE Exam & Cheatsheet: Feedback Systems in Hindi for Electrical & Computer Engineering for PE course. Download more important topics related with notes, lectures and mock test series for PE Exam Exam by signing up for free. PE Exam: Cheatsheet: Feedback Systems
Description
Cheatsheet: Feedback Systems of Electrical & Computer Engineering to help you remember important concepts with short tricks. Start learning for PE Exam exam & improve retention with EduRev.
Information about Cheatsheet: Feedback Systems
In this doc you can find the meaning of Cheatsheet: Feedback Systems defined & explained in the simplest way possible. Besides explaining types of Cheatsheet: Feedback Systems theory, EduRev gives you an ample number of questions to practice Cheatsheet: Feedback Systems tests, examples and also practice PE Exam tests


Related Searches
shortcuts and tricks, study material, Cheatsheet: Feedback Systems, Cheatsheet: Feedback Systems, practice quizzes, past year papers, pdf , Objective type Questions, mock tests for examination, Important questions, Summary, MCQs, Sample Paper, Free, Cheatsheet: Feedback Systems, Previous Year Questions with Solutions, ppt, Semester Notes, Extra Questions, Viva Questions, video lectures, Exam;