PE Exam Exam > PE Exam Notes > Electrical & Computer Engineering for PE > Cheatsheet: Stability Analysis
Cheatsheet: Stability Analysis


1. Fundamentals of Stability
1.1 Stability Definitions

1.2 Equilibrium Points
- Equilibrium point: State where dx/dt = 0 or x[n+1] = x[n]
- Found by setting system dynamics equal to zero
- Stability determined by linearization about equilibrium
- Multiple equilibrium points possible in nonlinear systems
2. Routh-Hurwitz Criterion
2.1 Routh Array Construction
For characteristic equation: a₀sⁿ + a₁sⁿ⁻¹ + a₂sⁿ⁻² + ... + aₙ₋₁s + aₙ = 0

2.2 Stability Conditions
- Necessary condition: All coefficients aᵢ must be present and same sign
- Sufficient condition: All elements in first column of Routh array must be positive
- Number of sign changes in first column = number of RHP poles
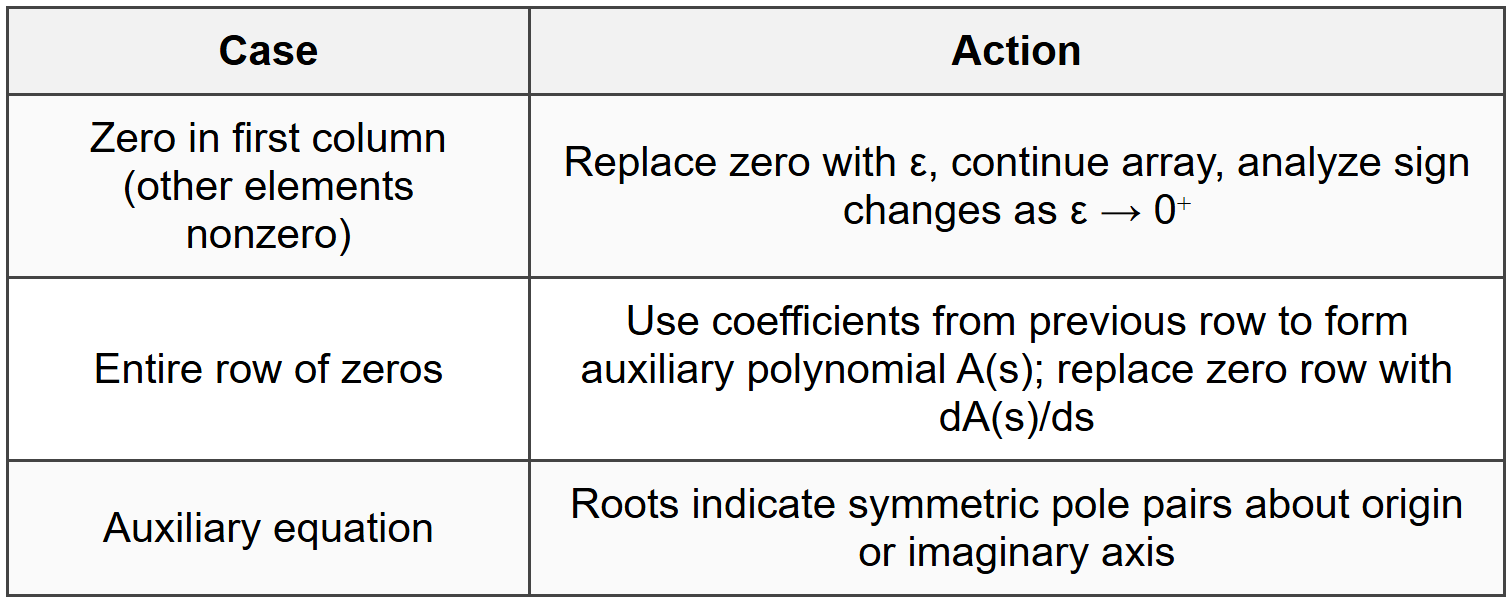
- Zero in first column: Replace with small ε > 0 and examine limit as ε → 0
- Entire row of zeros: Indicates poles on imaginary axis; form auxiliary equation from previous row
2.3 Special Cases
3. Root Locus Method
3.1 Root Locus Fundamentals

3.2 Root Locus Construction Rules

3.3 Gain Calculation on Root Locus
For point s₀ on locus: K = |∏(s₀ - zᵢ)|/|∏(s₀ - pⱼ)|
- Product of vector lengths from poles divided by product of vector lengths from zeros
- Use magnitude condition: K = 1/|G(s₀)H(s₀)|
4. Nyquist Stability Criterion
4.1 Nyquist Fundamentals
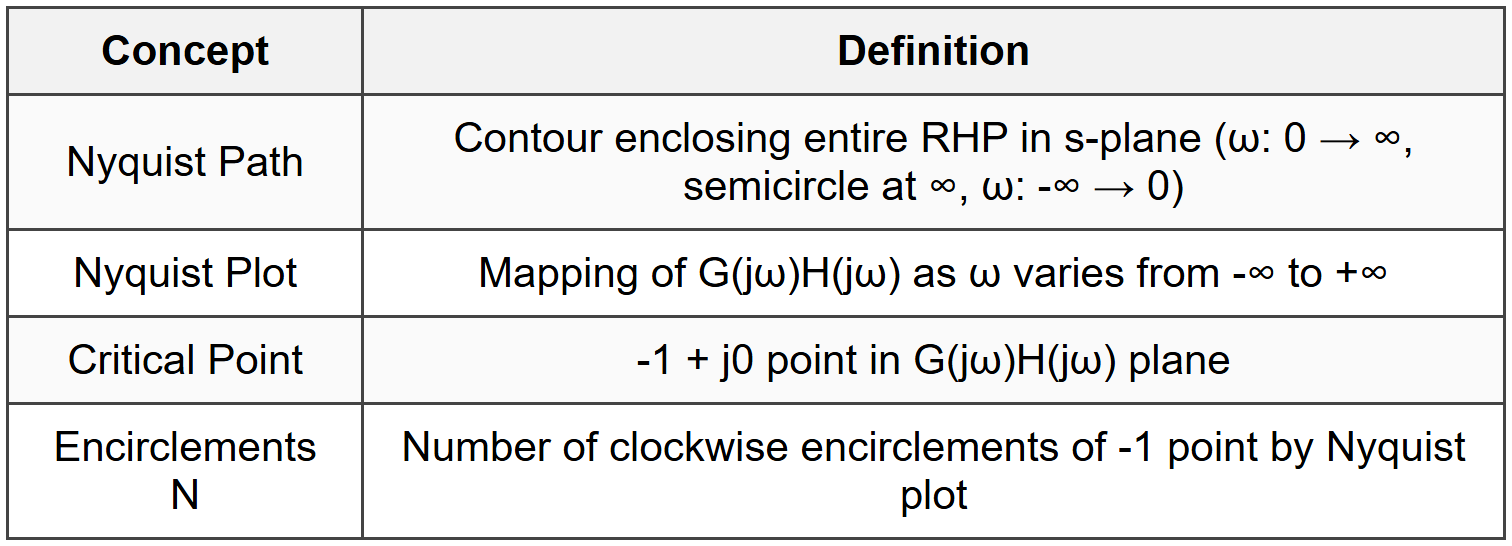
4.2 Nyquist Stability Criterion
Z = N + P
- Z = number of closed-loop poles in RHP (unstable poles)
- N = number of clockwise encirclements of -1 point
- P = number of open-loop poles in RHP
- For stability: Z = 0, therefore N = -P
- If P = 0 (open-loop stable): no encirclements of -1 for closed-loop stability
- Counterclockwise encirclements count as negative N
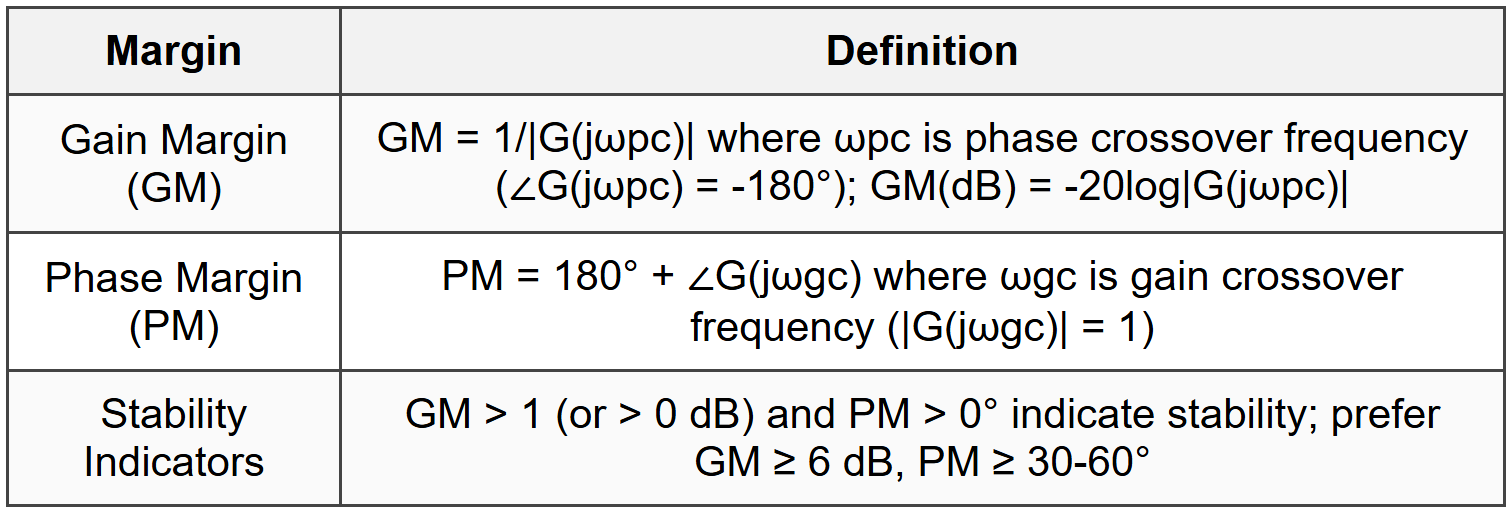
4.3 Gain and Phase Margins
4.4 Nyquist Plot Construction
- Start at ω = 0⁺: evaluate G(j0)H(j0)
- For poles/zeros at origin: plot includes semicircular arc at infinity
- Type 0: starts at finite positive real axis value
- Type 1: semicircle from -90° (ω = 0⁺) with radius → ∞
- Type 2: semicircle from -180° (ω = 0⁺) with radius → ∞
- Plot G(jω)H(jω) for ω: 0 → ∞, then mirror about real axis for ω: -∞ → 0
- End point as ω → ∞: approaches origin at angle -90°(n - m)
5. Bode Plot Stability Analysis
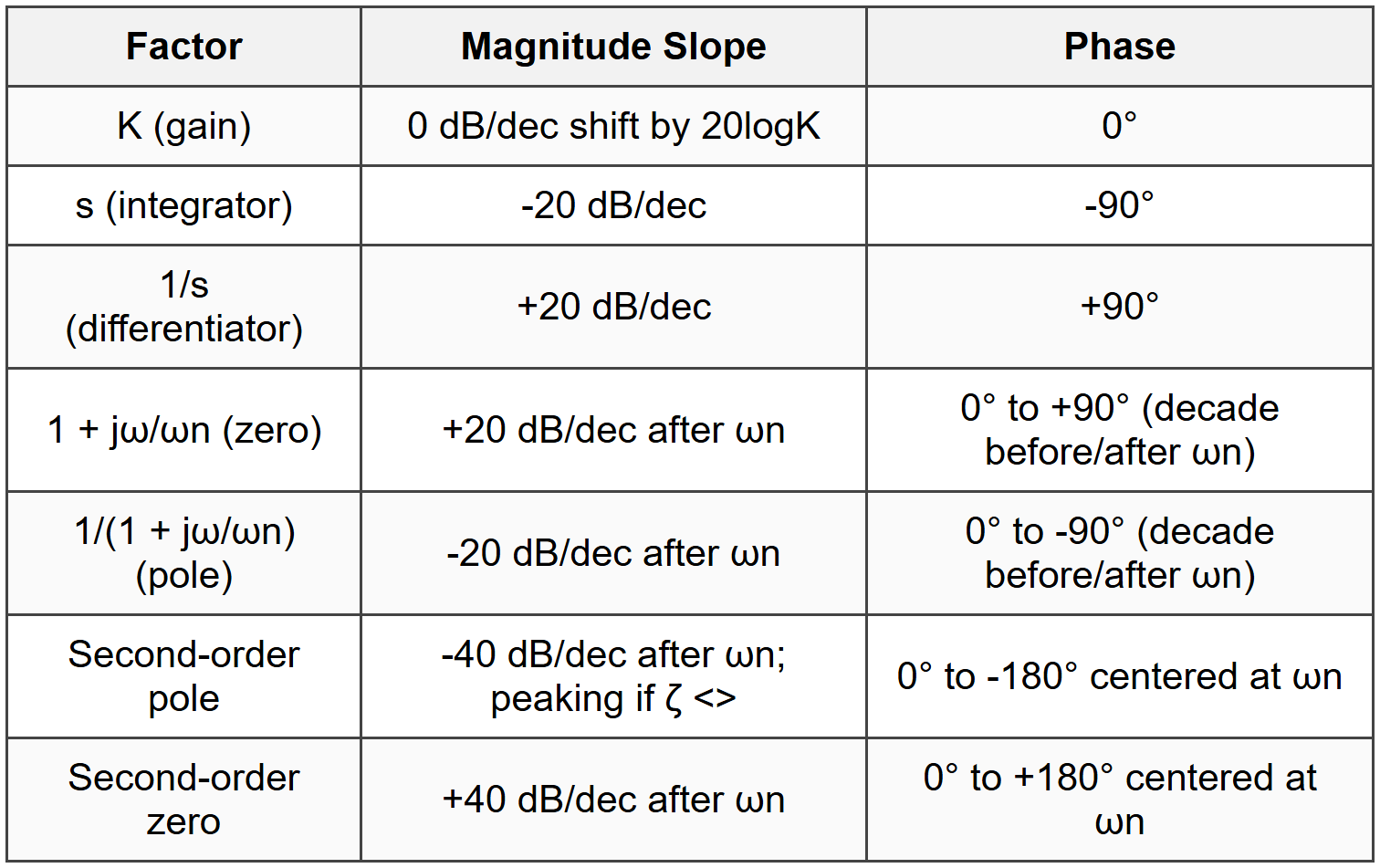
5.1 Bode Plot Basics

5.2 Standard Factor Contributions
5.3 Stability from Bode Plots
- System stable if PM > 0° and GM > 0 dB
- Read PM at gain crossover frequency: PM = 180° + ∠G(jωgc)
- Read GM at phase crossover frequency: GM(dB) = -20log|G(jωpc)|
- If phase never reaches -180°, GM = ∞
- Typical design targets: GM ≥ 6 dB, PM ≥ 30-60°
- Slope at gain crossover should be -20 dB/dec for good stability
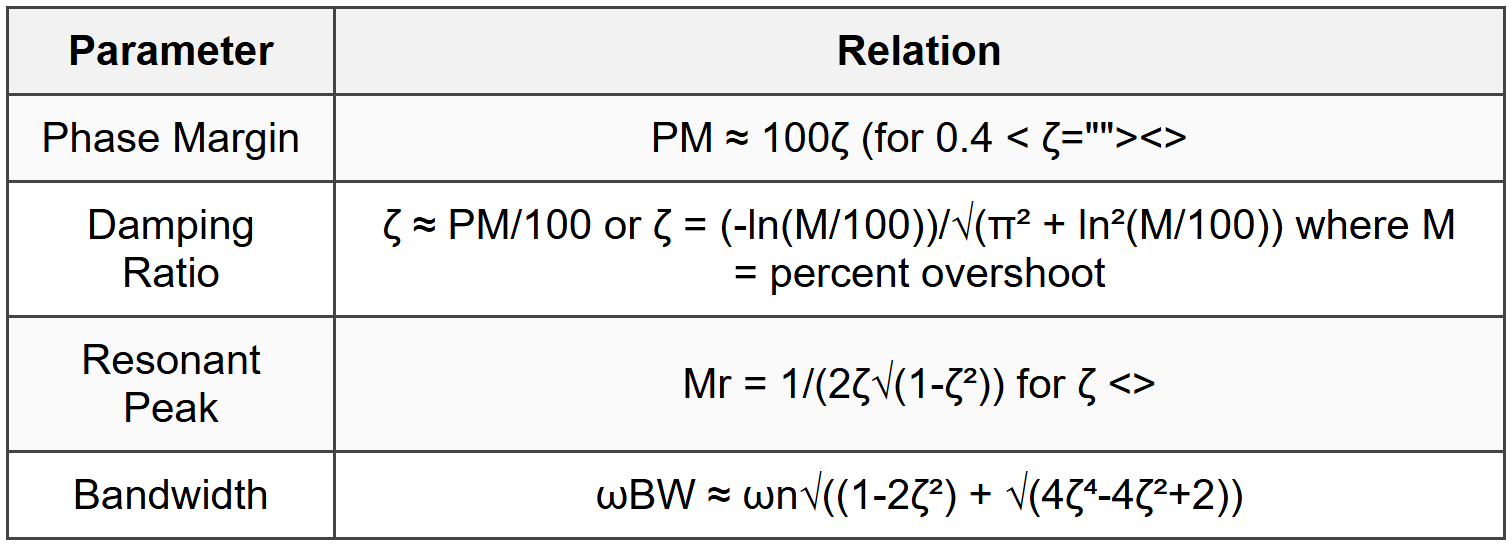
5.4 Second-Order System Approximations
6. State-Space Stability Analysis
6.1 State-Space Representation
ẋ = Ax + Bu; y = Cx + Du
- x: state vector (n × 1)
- A: system matrix (n × n)
- B: input matrix (n × m)
- C: output matrix (p × n)
- D: feedthrough matrix (p × m)
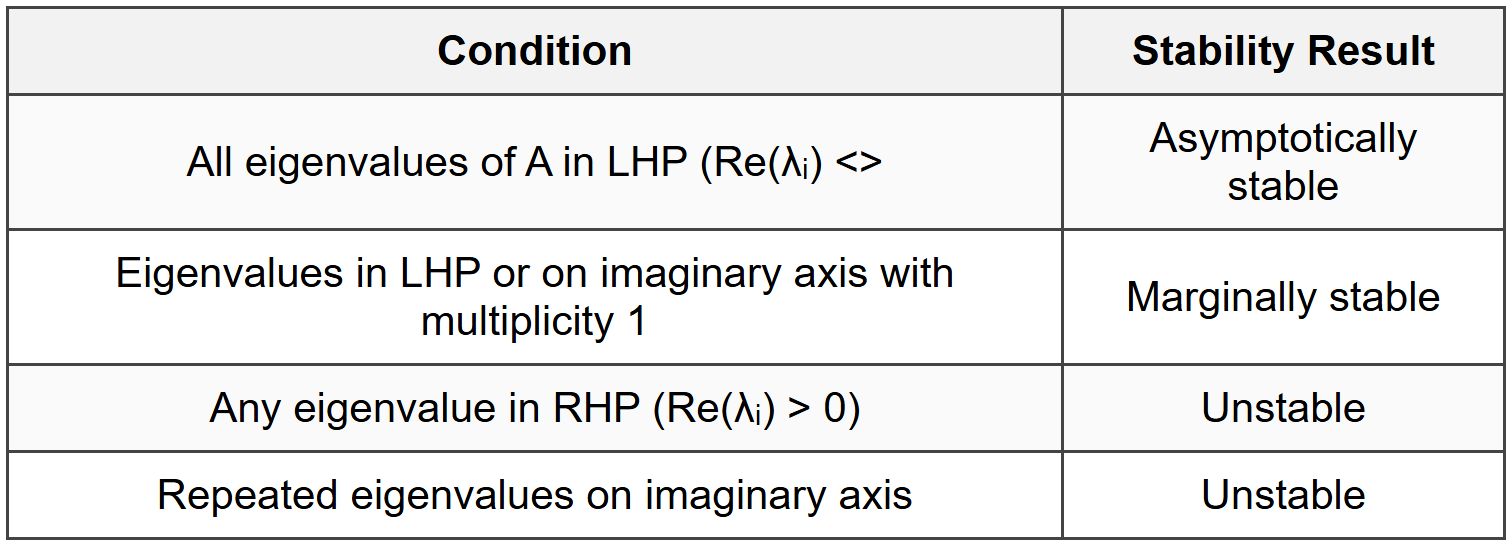
6.2 Eigenvalue-Based Stability
6.3 Lyapunov Stability Theory
6.3.1 Lyapunov Direct Method
- Find Lyapunov function V(x) > 0 for x ≠ 0, V(0) = 0
- If dV/dt = ∂V/∂x · ẋ < 0="" for="" x="" ≠="" 0,="" system="" is="" asymptotically="">
- If dV/dt ≤ 0, system is stable
- If dV/dt > 0, system is unstable
- Common choice: V(x) = xᵀPx where P is positive definite
6.3.2 Lyapunov Equation (Linear Systems)
AᵀP + PA = -Q
- If Q is positive definite and P is positive definite, system is asymptotically stable
- Common choice: Q = I (identity matrix)
- Solve for P; check if P is positive definite (all eigenvalues > 0 or all leading principal minors > 0)
6.4 Controllability and Observability

7. Discrete-Time Stability
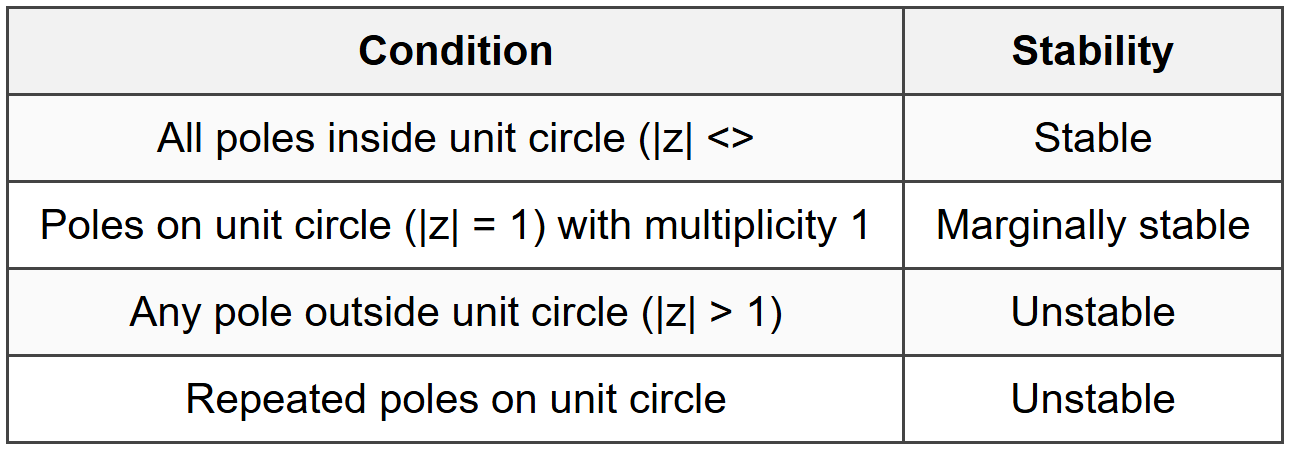
7.1 Z-Domain Stability
7.2 Jury Stability Test
For characteristic equation: a₀zⁿ + a₁zⁿ⁻¹ + ... + aₙ = 0
- Necessary conditions: P(1) > 0, (-1)ⁿP(-1) > 0, |aₙ| <>
- Form Jury table with 2n-3 rows alternating coefficients and computed values
- Sufficient condition: Elements in first column must satisfy magnitude conditions
- More complex than Routh-Hurwitz; often easier to use bilinear transformation
7.3 Bilinear Transformation (w-transform)
z = (1 + w)/(1 - w) or w = (z - 1)/(z + 1)
- Maps interior of unit circle in z-plane to LHP in w-plane
- After substitution, apply Routh-Hurwitz to polynomial in w
- System stable in z-domain if resulting w-domain system is stable
7.4 Discrete State-Space Stability
x[k+1] = Φx[k] + Γu[k]; y[k] = Cx[k] + Du[k]
- Φ: state transition matrix (discrete)
- Stability determined by eigenvalues of Φ
- All eigenvalues must satisfy |λᵢ| <>
- Discrete Lyapunov equation: ΦᵀPΦ - P = -Q
8. Relative Stability and Performance Metrics
8.1 Time-Domain Specifications

8.2 Steady-State Error Constants

8.3 System Type and Error
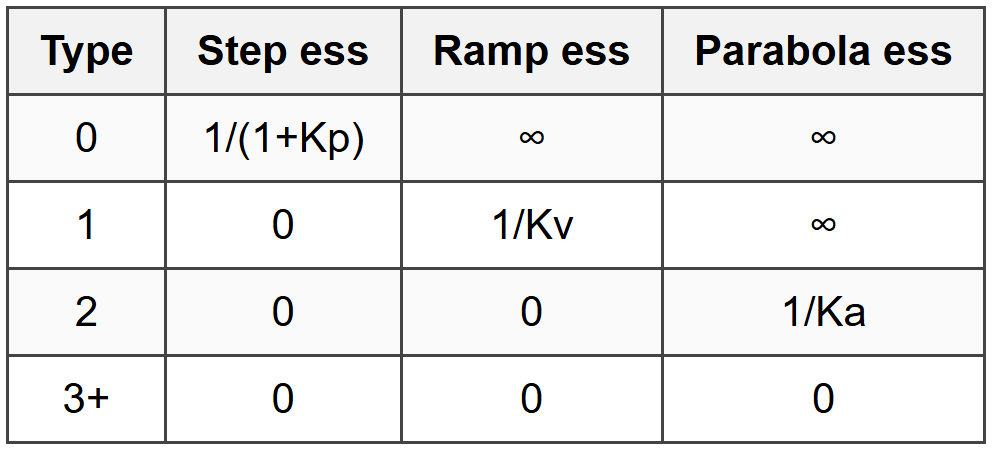
System type = number of poles at origin in open-loop transfer function G(s)H(s)
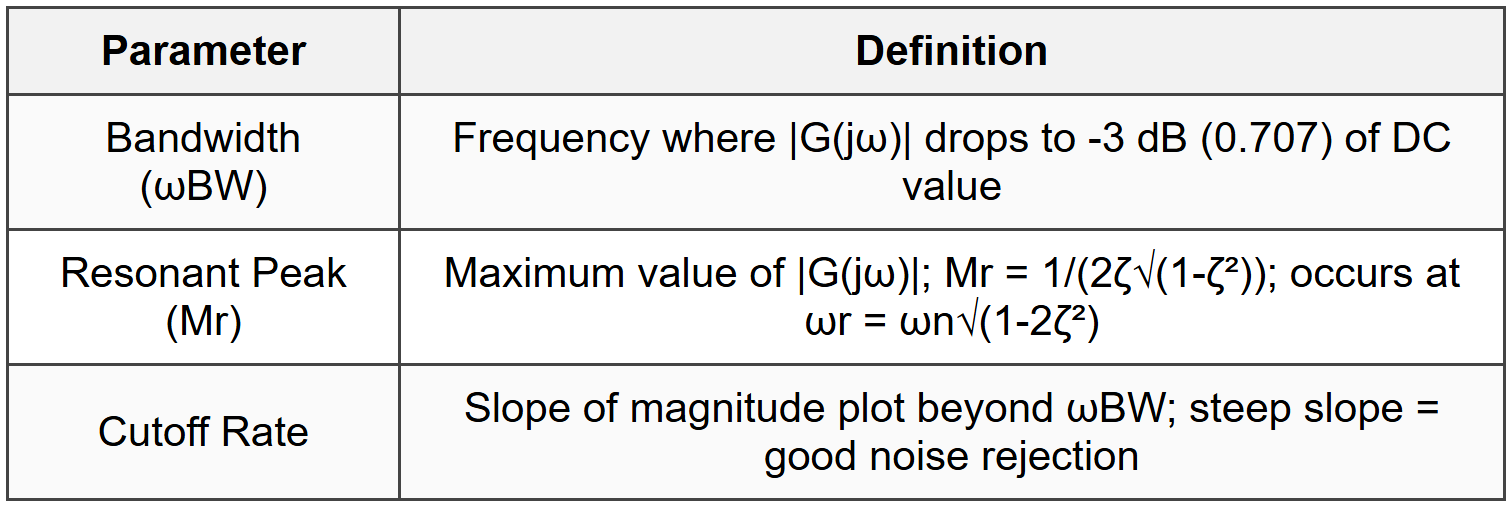
8.4 Frequency-Domain Performance
9. Advanced Stability Topics
9.1 Gain and Phase Margins from Root Locus
- Find K at imaginary axis crossing (use Routh-Hurwitz)
- Gain margin: ratio of K at instability to actual K
- Phase margin: angle from dominant pole to negative real axis (approximation)
9.2 Conditional Stability
- System stable for certain gain ranges but unstable outside those ranges
- Multiple crossings of -1 point on Nyquist plot
- Requires careful gain selection
- Bode plot shows multiple phase crossovers
9.3 Nichols Chart
- Plot of magnitude (dB) vs. phase of G(jω) on rectangular coordinates
- Contours of constant closed-loop magnitude and phase
- Read closed-loop frequency response directly
- Stability: curve must not enclose -1 point (0 dB, -180°)
- Gain and phase margins read directly from chart
9.4 Describing Function Analysis (Nonlinear Systems)
- Approximate nonlinearity by fundamental harmonic response
- N(A) = describing function, depends on input amplitude A
- Stability condition: -1/N(A) must not intersect G(jω)
- Used for limit cycle prediction in nonlinear systems
- Common nonlinearities: saturation, deadzone, relay, hysteresis
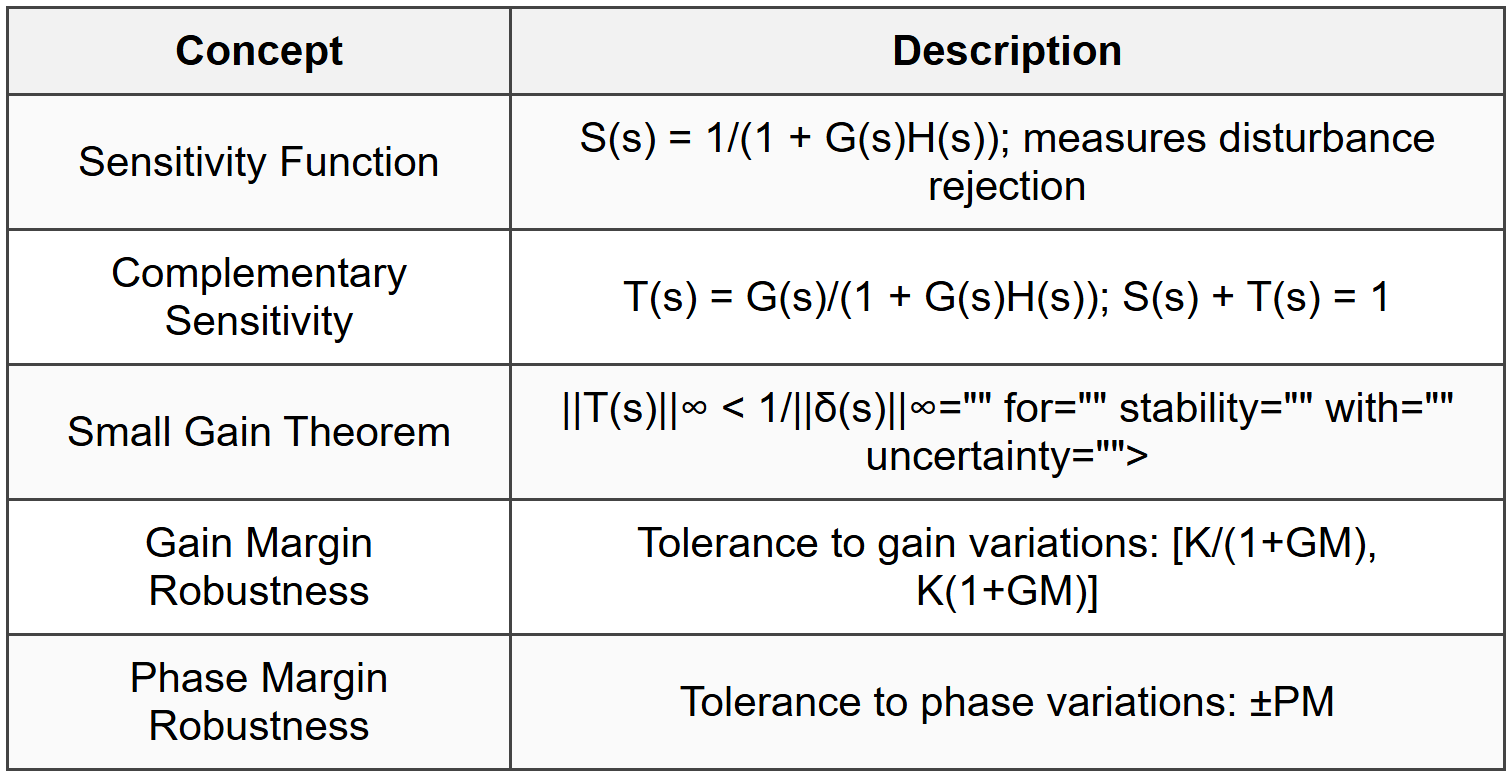
9.5 Robust Stability
10. Practical Stability Considerations
10.1 Design Guidelines
- Phase margin: 30-60° (45° optimal for good balance)
- Gain margin: ≥6 dB (factor of 2)
- Crossover frequency should have slope of -20 dB/dec
- Maximize bandwidth while maintaining adequate margins
- Place dominant poles to achieve desired transient response
- Keep nondominant poles at least 5-10 times farther from imaginary axis
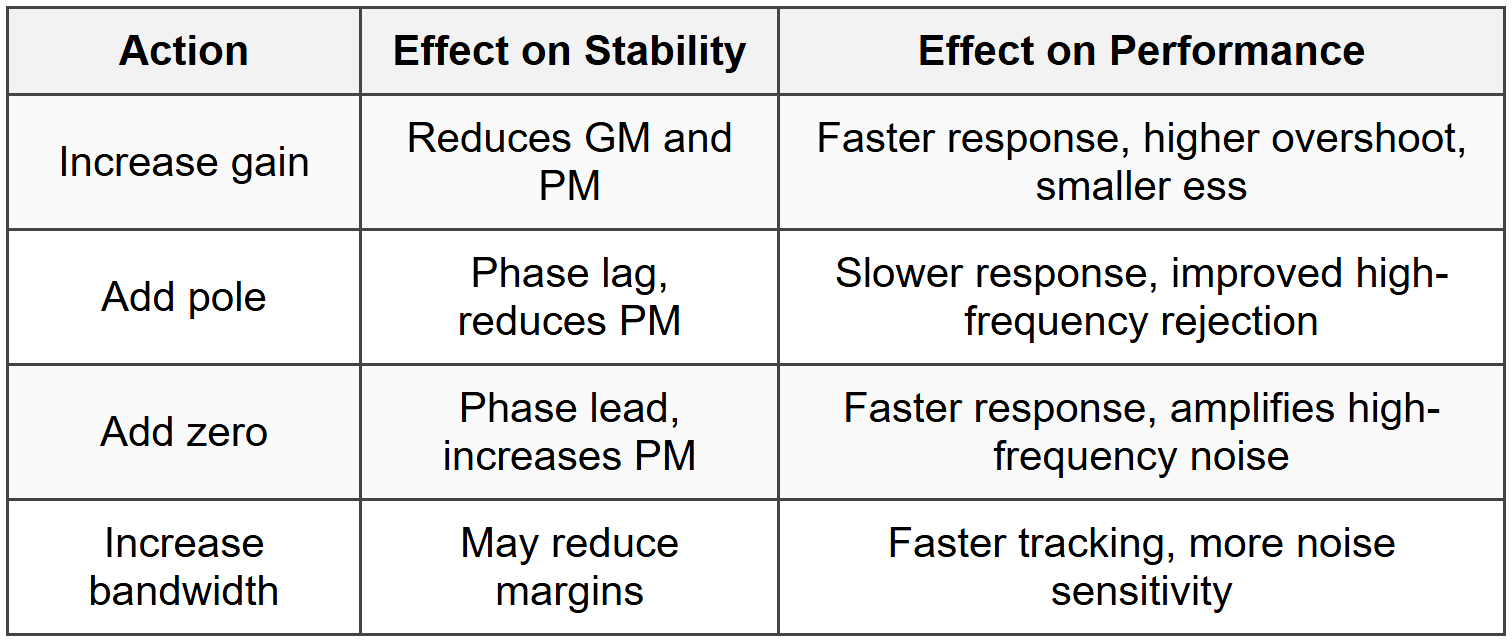
10.2 Stability Margins Trade-offs
10.3 Common Stability Issues
- Time delays: e^(-sτ) adds phase lag; approximations: Padé, Taylor series
- Saturation: nonlinearity can cause limit cycles or instability in large-signal operation
- Sensor noise: high gain amplifies noise; requires filtering
- Unmodeled dynamics: high-frequency poles/zeros can destabilize system
- Parameter variations: use robust design to handle uncertainty
10.4 Stability Testing Procedure
- Find characteristic equation: 1 + KG(s)H(s) = 0
- Check necessary conditions: all coefficients present and same sign
- Apply Routh-Hurwitz or plot root locus
- Verify GM and PM from Bode or Nyquist plot
- Calculate time-domain specifications if needed
- Check robustness to parameter variations
- Simulate to verify analysis and check for nonlinear effects
The document Cheatsheet: Stability Analysis is a part of the PE Exam Course Electrical & Computer Engineering for PE.
All you need of PE Exam at this link: PE Exam
About this Document

Apr 20, 2026 Last updated
Related Exams
Document Description: Cheatsheet: Stability Analysis for PE Exam 2026 is part of Electrical & Computer Engineering for PE preparation. The notes and questions for Cheatsheet: Stability Analysis have been prepared according to the PE Exam exam syllabus. Information about Cheatsheet: Stability Analysis covers topics like and Cheatsheet: Stability Analysis Example, for PE Exam 2026 Exam. Find important definitions, questions, notes, meanings, examples, exercises and tests below for Cheatsheet: Stability Analysis.
Introduction of Cheatsheet: Stability Analysis in English is available as part of our Electrical & Computer Engineering for PE for PE Exam & Cheatsheet: Stability Analysis in Hindi for Electrical & Computer Engineering for PE course. Download more important topics related with notes, lectures and mock test series for PE Exam Exam by signing up for free. PE Exam: Cheatsheet: Stability Analysis
Description
Cheatsheet: Stability Analysis of Electrical & Computer Engineering to help you remember important concepts with short tricks. Start learning for PE Exam exam & improve retention with EduRev.
Information about Cheatsheet: Stability Analysis
In this doc you can find the meaning of Cheatsheet: Stability Analysis defined & explained in the simplest way possible. Besides explaining types of Cheatsheet: Stability Analysis theory, EduRev gives you an ample number of questions to practice Cheatsheet: Stability Analysis tests, examples and also practice PE Exam tests
Top Courses for PE Exam
Related Searches
shortcuts and tricks, Previous Year Questions with Solutions, study material, pdf , Sample Paper, Summary, ppt, Objective type Questions, video lectures, past year papers, MCQs, Extra Questions, practice quizzes, Semester Notes, Important questions, Free, Viva Questions, Cheatsheet: Stability Analysis, Cheatsheet: Stability Analysis, mock tests for examination, Cheatsheet: Stability Analysis, Exam;