PE Exam Exam > PE Exam Notes > Electrical & Computer Engineering for PE > Cheatsheet: Signals And Systems
Cheatsheet: Signals And Systems


1. Signal Classification
1.1 Continuous-Time vs Discrete-Time

1.2 Analog vs Digital

1.3 Periodic vs Aperiodic

1.4 Even vs Odd Signals
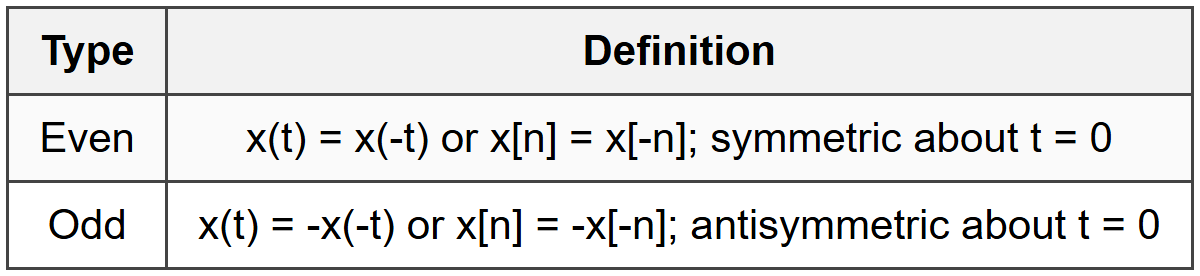
- Any signal can be decomposed: x(t) = xₑ(t) + xₒ(t)
- Even part: xₑ(t) = ½[x(t) + x(-t)]
- Odd part: xₒ(t) = ½[x(t) - x(-t)]
1.5 Energy vs Power Signals

- Energy and power signals are mutually exclusive
- Periodic signals are power signals
- Finite-duration signals are energy signals
1.6 Deterministic vs Random

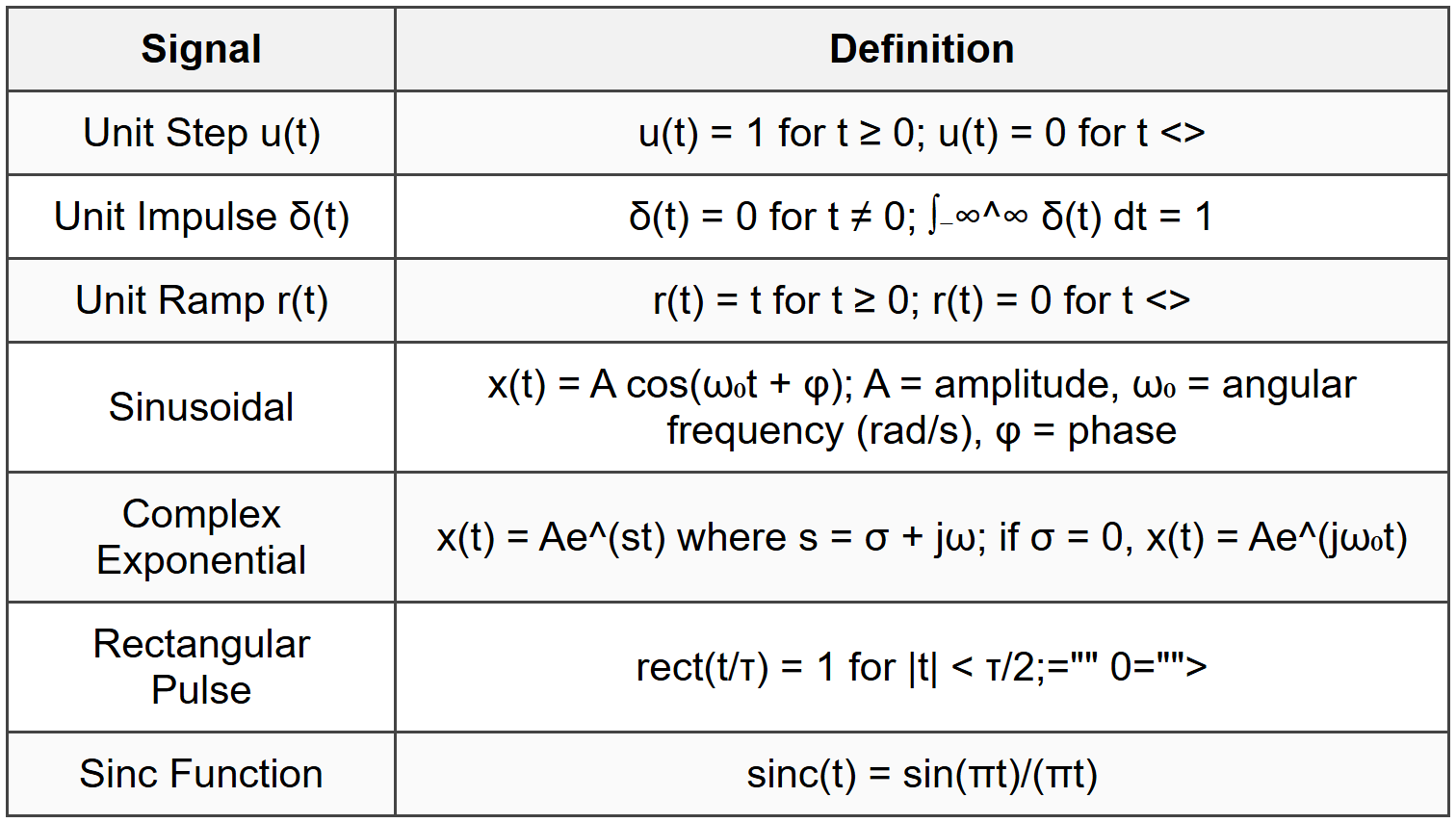
2. Basic Signals
2.1 Continuous-Time Signals
2.2 Discrete-Time Signals

2.3 Impulse Properties
- Sifting property: ∫₋∞^∞ x(t)δ(t - t₀) dt = x(t₀)
- Discrete sifting: Σₙ₌₋∞^∞ x[n]δ[n - n₀] = x[n₀]
- Derivative of step: δ(t) = du(t)/dt
- Discrete step relation: δ[n] = u[n] - u[n-1]
- Scaling: δ(at) = (1/|a|)δ(t)
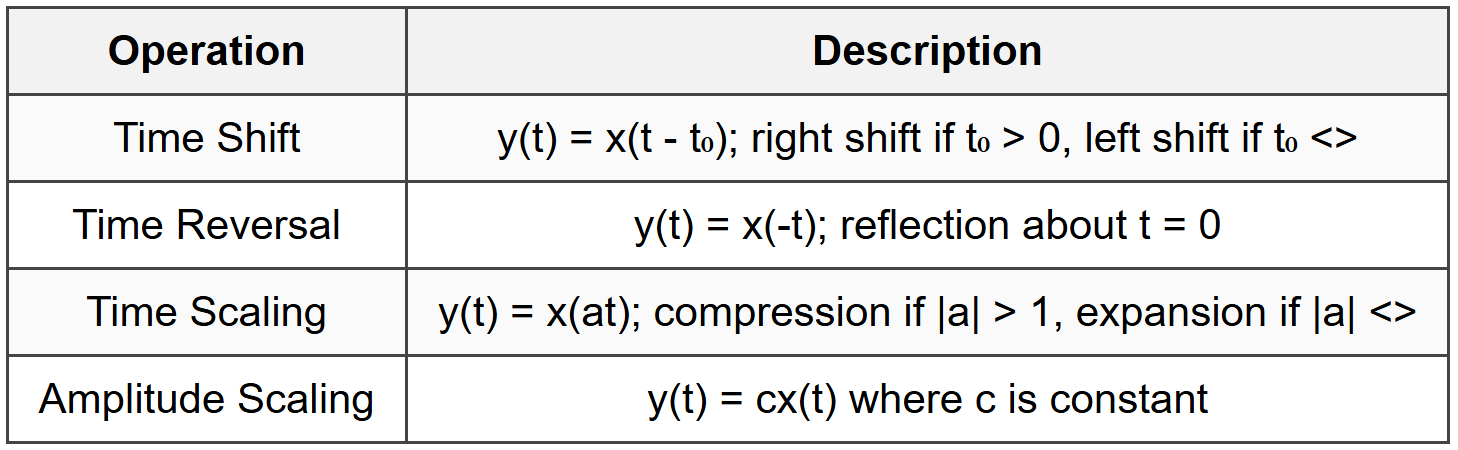
3. Signal Operations
3.1 Time-Domain Operations
3.2 Order of Operations
- For y(t) = x(at - b): 1) time scaling by a, 2) time shift by b/a
- For y(t) = x(at + b): 1) time scaling by a, 2) time shift by -b/a
- Alternative: 1) shift by b, 2) scale by a (different result)
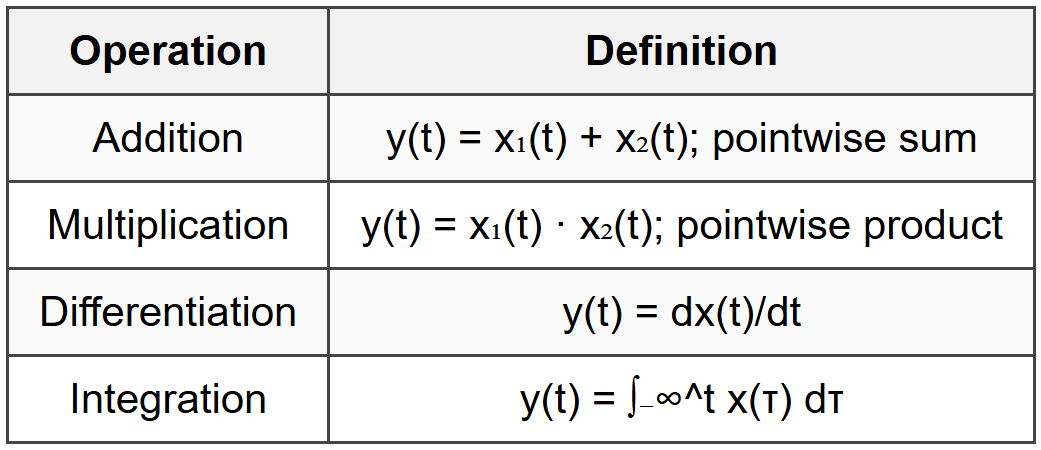
3.3 Arithmetic Operations
4. System Properties
4.1 Linearity
- System is linear if: T[ax₁(t) + bx₂(t)] = aT[x₁(t)] + bT[x₂(t)]
- Satisfies additivity: T[x₁(t) + x₂(t)] = T[x₁(t)] + T[x₂(t)]
- Satisfies homogeneity: T[ax(t)] = aT[x(t)]
4.2 Time-Invariance
- If x(t) → y(t), then x(t - t₀) → y(t - t₀) for all t₀
- System characteristics do not change with time
4.3 Causality
- Output at time t₀ depends only on input for t ≤ t₀
- Non-anticipative system
- For h(t): causal if h(t) = 0 for t <>
- For h[n]: causal if h[n] = 0 for n <>
4.4 Stability (BIBO)
- Bounded-Input Bounded-Output stable
- If |x(t)| < m="">< ∞,="" then="" |y(t)|="">< n=""><>
- CT condition: ∫₋∞^∞ |h(t)| dt <>
- DT condition: Σₙ₌₋∞^∞ |h[n]| <>
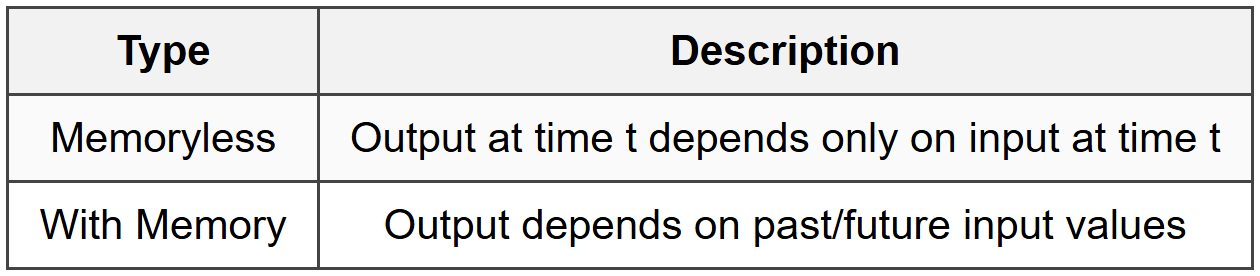
4.5 Memory
4.6 Invertibility
- Inverse system exists such that cascading gives identity
- Distinct inputs produce distinct outputs
5. LTI Systems
5.1 Convolution

5.2 Convolution Properties
- Commutative: x(t) * h(t) = h(t) * x(t)
- Associative: [x(t) * h₁(t)] * h₂(t) = x(t) * [h₁(t) * h₂(t)]
- Distributive: x(t) * [h₁(t) + h₂(t)] = x(t) * h₁(t) + x(t) * h₂(t)
- Identity: x(t) * δ(t) = x(t)
- Shift property: x(t) * δ(t - t₀) = x(t - t₀)
5.3 Impulse Response
- h(t) = T[δ(t)]; characterizes LTI system completely
- Output: y(t) = x(t) * h(t)
- Parallel connection: h(t) = h₁(t) + h₂(t)
- Series connection: h(t) = h₁(t) * h₂(t)
5.4 Step Response
- s(t) = ∫₋∞^t h(τ) dτ = h(t) * u(t)
- h(t) = ds(t)/dt
- s[n] = Σₖ₌₋∞^n h[k] = h[n] * u[n]
- h[n] = s[n] - s[n-1]
6. Fourier Analysis
6.1 Fourier Series (Continuous-Time)

- aₖ = (1/T) ∫₀^T x(t)cos(kω₀t) dt; k ≥ 0
- bₖ = (1/T) ∫₀^T x(t)sin(kω₀t) dt; k ≥ 1
- a₀ = (1/T) ∫₀^T x(t) dt (DC component)
6.2 Fourier Series (Discrete-Time)

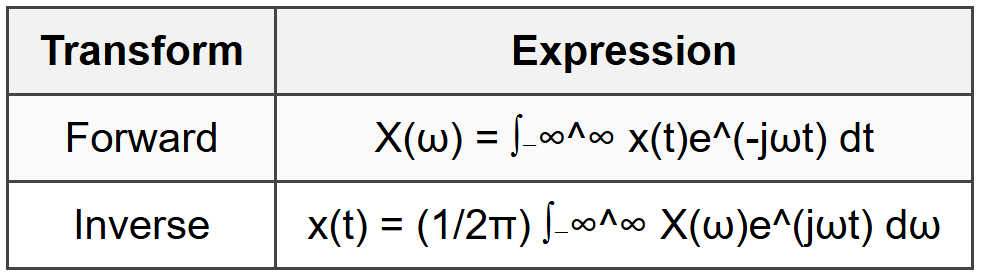
6.3 Fourier Transform (Continuous-Time)
6.4 Fourier Transform Properties

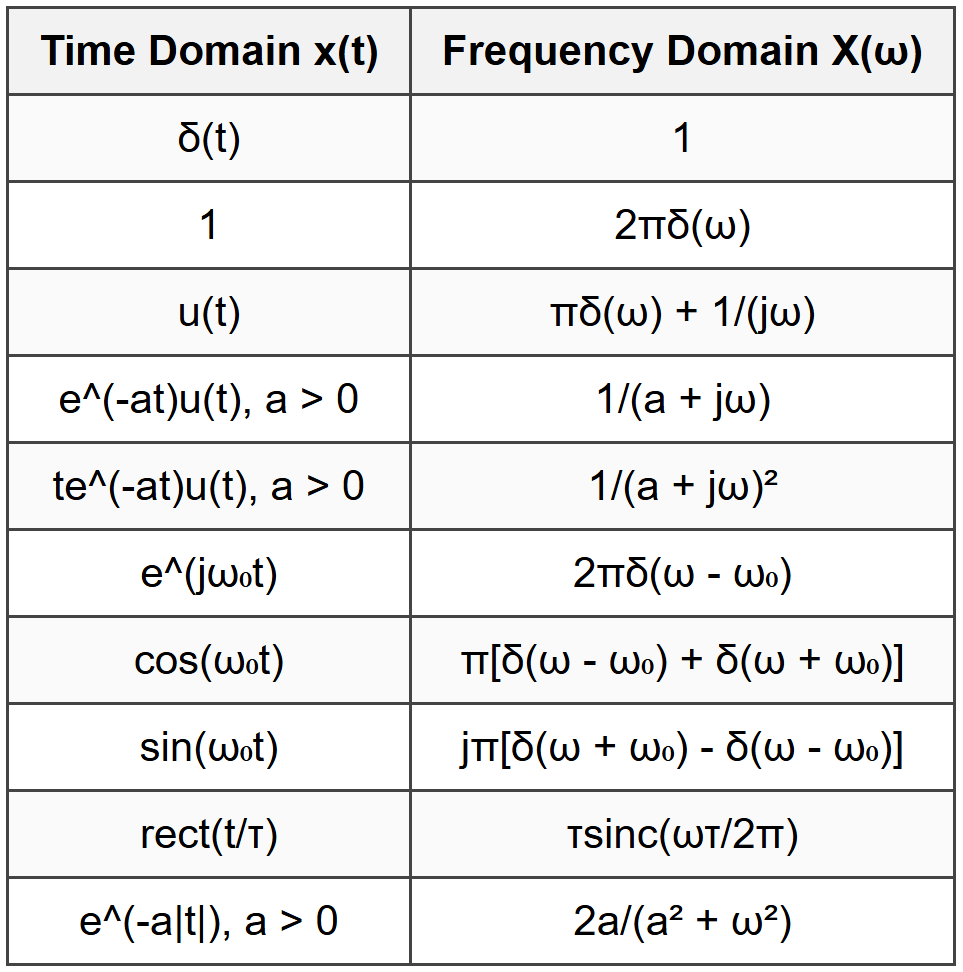
6.5 Common Fourier Transform Pairs
6.6 Discrete-Time Fourier Transform (DTFT)
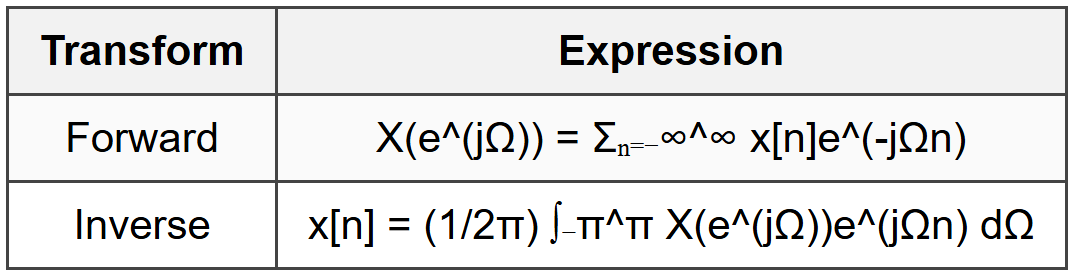
- X(e^(jΩ)) is periodic with period 2π
- Ω is discrete-time frequency in radians
6.7 Frequency Response
- H(ω) = Y(ω)/X(ω) = ℱ{h(t)}
- y(t) = x(t) * h(t) ↔ Y(ω) = X(ω)H(ω)
- |H(ω)| = magnitude response
- ∠H(ω) = phase response
7. Laplace Transform
7.1 Definitions

- s = σ + jω (complex frequency)
- Region of Convergence (ROC) specifies values of s for which X(s) converges
7.2 ROC Properties
- ROC consists of vertical strips in s-plane
- For rational X(s), ROC bounded by poles
- Right-sided signal: ROC is Re{s} > σ₀
- Left-sided signal: ROC is Re{s} <>
- Two-sided signal: ROC is σ₁ < re{s}=""><>
- Finite duration: ROC is entire s-plane
- Causal signal: ROC is to right of rightmost pole
7.3 Laplace Transform Properties

7.4 Common Laplace Transform Pairs

7.5 Transfer Function
- H(s) = Y(s)/X(s) with zero initial conditions
- H(s) = ℒ{h(t)}
- Poles: roots of denominator (make H(s) → ∞)
- Zeros: roots of numerator (make H(s) = 0)
- System stable if all poles in left half-plane (Re{s} <>
7.6 Partial Fraction Expansion
- For proper rational X(s) = N(s)/D(s) where degree(N) <>
- Simple poles: X(s) = Σᵢ Aᵢ/(s - pᵢ); Aᵢ = [(s - pᵢ)X(s)]|ₛ₌ₚᵢ
- Repeated poles (order r): additional terms with (s - pᵢ)^k in denominator
- Complex conjugate poles: combine terms for real time-domain result
8. Z-Transform
8.1 Definitions

- z = re^(jΩ) (complex variable)
- ROC specifies values of z for which X(z) converges
8.2 ROC Properties
- ROC consists of rings or disks in z-plane
- For rational X(z), ROC bounded by poles
- Right-sided sequence: ROC is |z| > r₀
- Left-sided sequence: ROC is |z| <>
- Two-sided sequence: ROC is r₁ < |z|=""><>
- Finite duration: ROC is entire z-plane (except possibly z = 0 or z = ∞)
- Causal sequence: ROC is exterior of circle beyond outermost pole
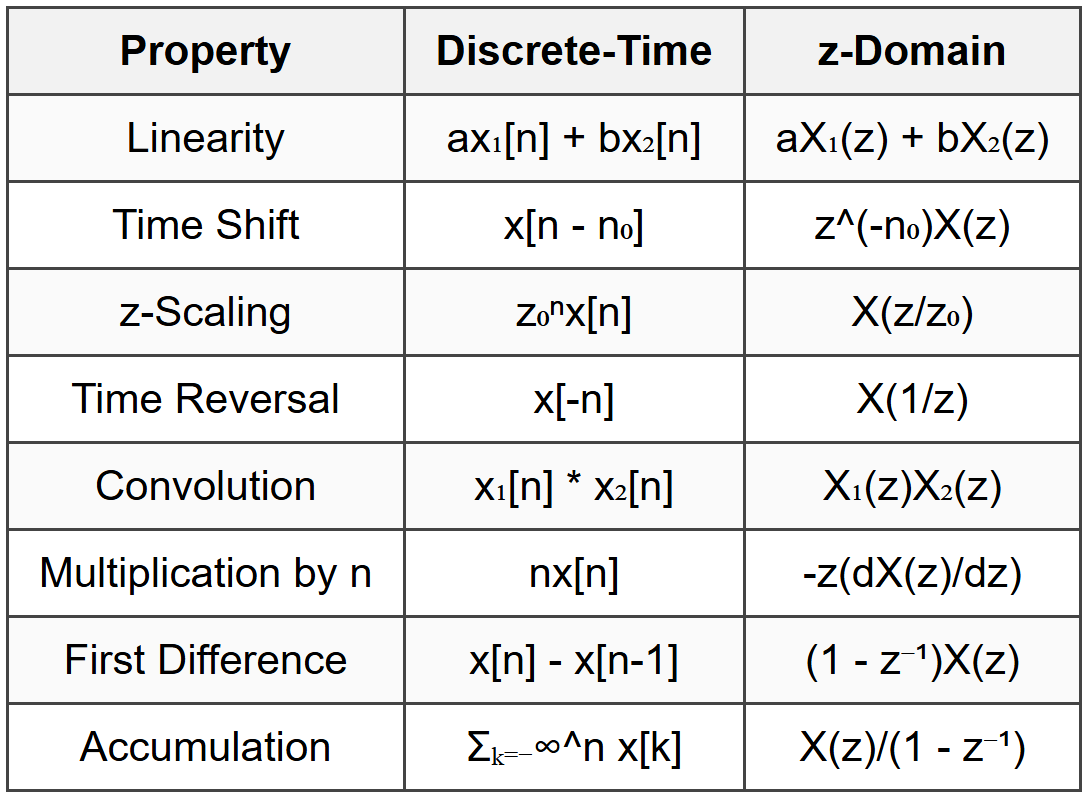
8.3 Z-Transform Properties
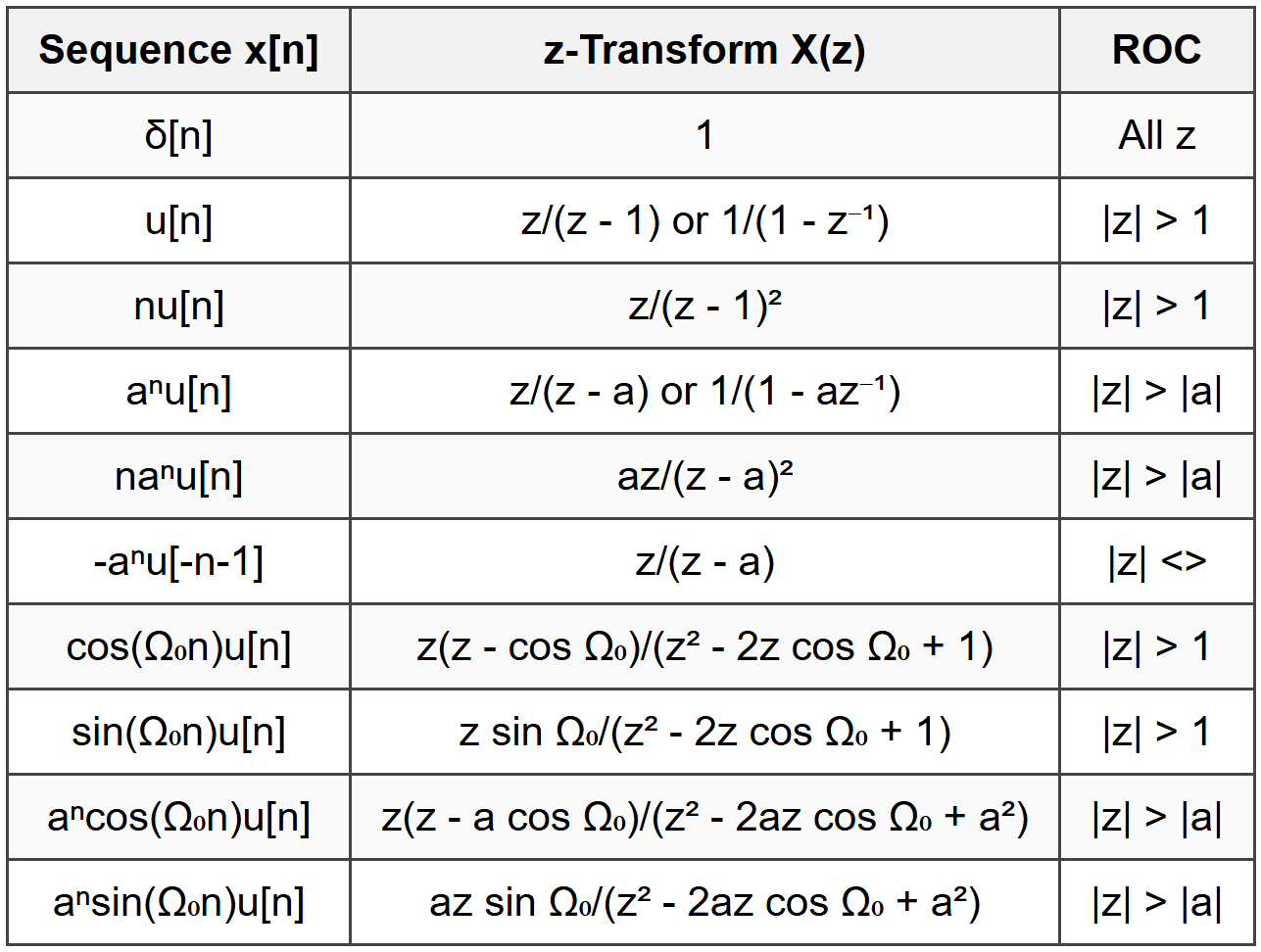
8.4 Common Z-Transform Pairs
8.5 Transfer Function
- H(z) = Y(z)/X(z) with zero initial conditions
- H(z) = ℤ{h[n]}
- Poles: roots of denominator
- Zeros: roots of numerator
- System stable if all poles inside unit circle (|z| <>
8.6 Relation to DTFT
- DTFT is Z-transform evaluated on unit circle: X(e^(jΩ)) = X(z)|_(z=e^(jΩ))
- DTFT exists if ROC includes unit circle
9. Sampling and Reconstruction
9.1 Sampling Theorem
- Nyquist-Shannon sampling theorem
- Bandlimited signal with maximum frequency fₘ can be reconstructed if sampling frequency fₛ ≥ 2fₘ
- Nyquist rate: fₙ = 2fₘ (minimum sampling rate)
- Nyquist frequency: fₙ/2 (maximum frequency that can be represented)
- ωₛ ≥ 2ωₘ for angular frequencies
9.2 Aliasing
- Occurs when fₛ <>
- High-frequency components appear as lower frequencies
- Frequency folding about fₛ/2
- Prevented by anti-aliasing filter before sampling
9.3 Ideal Sampling
- xₚ(t) = x(t) · Σₙ₌₋∞^∞ δ(t - nT) where T = 1/fₛ
- Xₚ(ω) = (1/T) Σₖ₌₋∞^∞ X(ω - kωₛ) where ωₛ = 2π/T
- Spectrum repeats every ωₛ
9.4 Reconstruction
- Ideal reconstruction: x(t) = Σₙ₌₋∞^∞ x(nT)sinc[(t - nT)/T]
- Ideal lowpass filter: H(ω) = T for |ω| < ωₛ/2;="" 0="">
- Zero-order hold (ZOH): piecewise constant between samples
10. Digital Filter Structures
10.1 Difference Equations
- General form: Σₖ₌₀^N aₖy[n-k] = Σₖ₌₀^M bₖx[n-k]
- Causal: y[n] = (1/a₀)[Σₖ₌₀^M bₖx[n-k] - Σₖ₌₁^N aₖy[n-k]]
- Order: max(M, N)
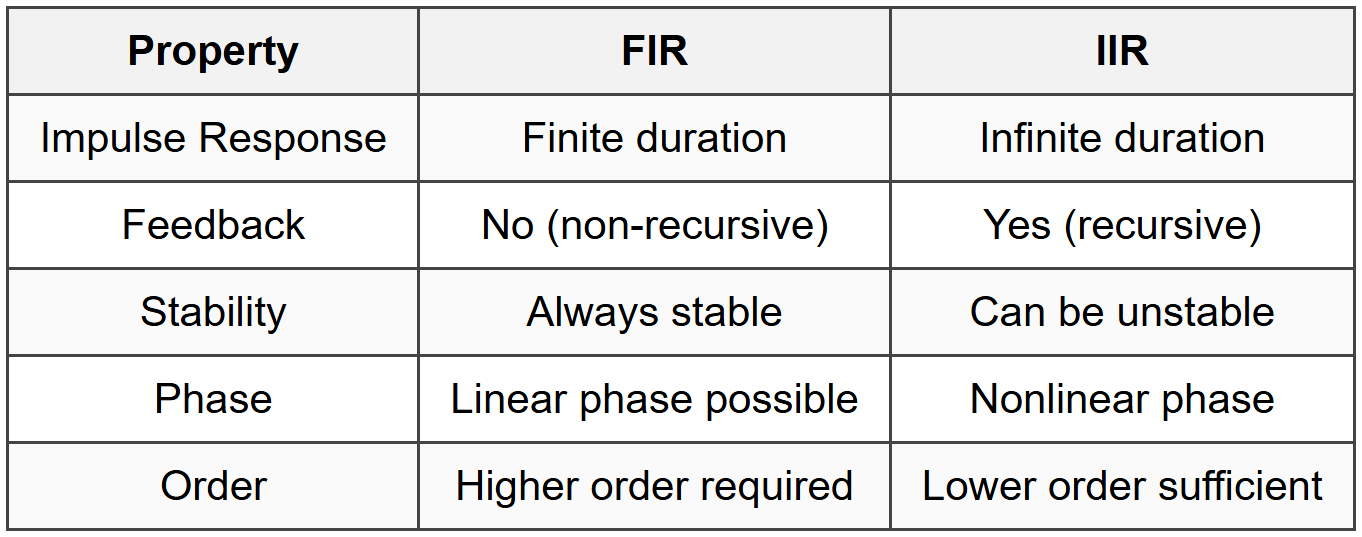
10.2 FIR vs IIR Filters
10.3 FIR Filter
- y[n] = Σₖ₌₀^(M-1) bₖx[n-k]
- H(z) = Σₖ₌₀^(M-1) bₖz^(-k)
- All poles at z = 0
- M coefficients, order M-1
10.4 IIR Filter
- y[n] = Σₖ₌₀^M bₖx[n-k] - Σₖ₌₁^N aₖy[n-k]
- H(z) = (Σₖ₌₀^M bₖz^(-k))/(1 + Σₖ₌₁^N aₖz^(-k))
- Poles not restricted to origin
- Requires stability check
11. Filter Design
11.1 Filter Specifications

11.2 Analog Filter Prototypes

11.3 Filter Types
- Lowpass: passes frequencies below cutoff
- Highpass: passes frequencies above cutoff
- Bandpass: passes frequencies within band [ω₁, ω₂]
- Bandstop (notch): attenuates frequencies within band
11.4 Bilinear Transformation
- Maps s-plane to z-plane: s = (2/T)[(z - 1)/(z + 1)]
- z = (1 + sT/2)/(1 - sT/2)
- Maps jω axis to unit circle
- Left half s-plane maps to interior of unit circle
- Frequency warping: Ω = (2/T)tan(ωT/2)
- Prewarping: compensate by designing at ω' = (2/T)tan(ωT/2)
12. State-Space Analysis
12.1 State Equations

- x = state vector (n × 1)
- u = input vector (p × 1)
- y = output vector (q × 1)
- A = system matrix (n × n)
- B = input matrix (n × p)
- C = output matrix (q × n)
- D = feedthrough matrix (q × p)
12.2 State-Space to Transfer Function
- H(s) = C(sI - A)⁻¹B + D
- H(z) = C(zI - A)⁻¹B + D
- Poles: eigenvalues of A (roots of det(sI - A) = 0)
12.3 Solutions
- CT: x(t) = e^(At)x(0) + ∫₀^t e^(A(t-τ))Bu(τ) dτ
- DT: x[n] = Aⁿx[0] + Σₖ₌₀^(n-1) A^(n-1-k)Bu[k]
- State transition matrix: Φ(t) = e^(At) or Φ[n] = Aⁿ
12.4 Controllability and Observability

The document Cheatsheet: Signals And Systems is a part of the PE Exam Course Electrical & Computer Engineering for PE.
All you need of PE Exam at this link: PE Exam
About this Document

Apr 20, 2026 Last updated
Related Exams
Document Description: Cheatsheet: Signals And Systems for PE Exam 2026 is part of Electrical & Computer Engineering for PE preparation. The notes and questions for Cheatsheet: Signals And Systems have been prepared according to the PE Exam exam syllabus. Information about Cheatsheet: Signals And Systems covers topics like and Cheatsheet: Signals And Systems Example, for PE Exam 2026 Exam. Find important definitions, questions, notes, meanings, examples, exercises and tests below for Cheatsheet: Signals And Systems.
Introduction of Cheatsheet: Signals And Systems in English is available as part of our Electrical & Computer Engineering for PE for PE Exam & Cheatsheet: Signals And Systems in Hindi for Electrical & Computer Engineering for PE course. Download more important topics related with notes, lectures and mock test series for PE Exam Exam by signing up for free. PE Exam: Cheatsheet: Signals And Systems
Description
Cheatsheet: Signals And Systems of Electrical & Computer Engineering to help you remember important concepts with short tricks. Start learning for PE Exam exam & improve retention with EduRev.
Information about Cheatsheet: Signals And Systems
In this doc you can find the meaning of Cheatsheet: Signals And Systems defined & explained in the simplest way possible. Besides explaining types of Cheatsheet: Signals And Systems theory, EduRev gives you an ample number of questions to practice Cheatsheet: Signals And Systems tests, examples and also practice PE Exam tests


Related Searches
ppt, Objective type Questions, Semester Notes, Important questions, Extra Questions, Previous Year Questions with Solutions, Sample Paper, past year papers, study material, video lectures, practice quizzes, Viva Questions, Cheatsheet: Signals And Systems, MCQs, Cheatsheet: Signals And Systems, Exam, Free, Summary, shortcuts and tricks, pdf , mock tests for examination, Cheatsheet: Signals And Systems;