PE Exam Exam > PE Exam Notes > Chemical Engineering for PE > Cheatsheet: Process Control
Cheatsheet: Process Control


1. Fundamentals of Process Control
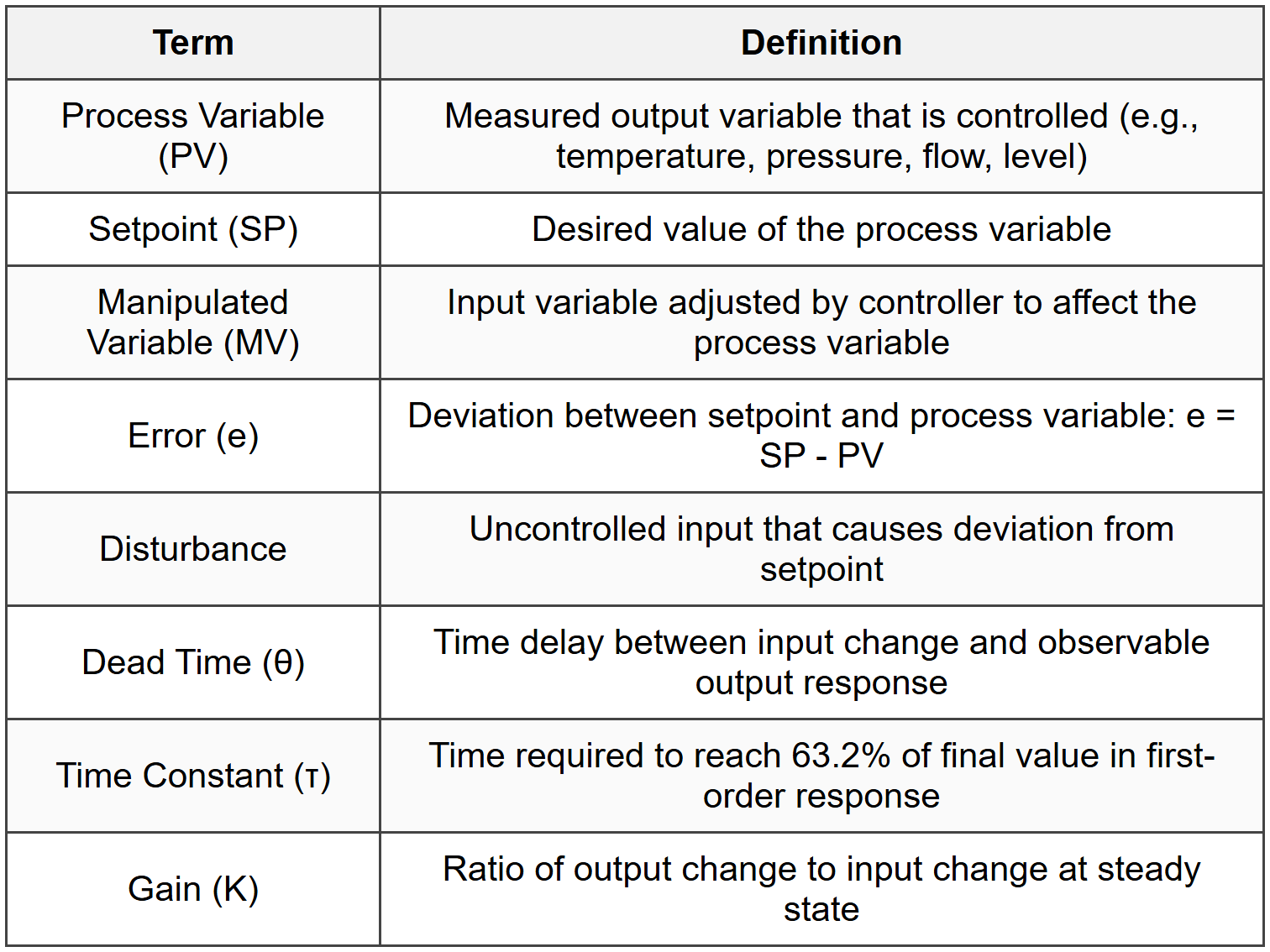
1.1 Basic Definitions
1.2 Control System Components
- Sensor/Transmitter: Measures process variable and converts to signal
- Controller: Compares PV to SP and determines control action
- Final Control Element: Executes controller output (valve, damper, motor)
- Process: System being controlled
1.3 Control Loop Types

2. Transfer Functions and Dynamic Response
2.1 Laplace Transform Basics

2.2 Standard Transfer Functions
2.2.1 First-Order System
- G(s) = K/(τs + 1)
- Step response: y(t) = K[1 - e-t/τ]
- Settling time (95%): ts = 3τ; (98%): ts = 4τ
2.2.2 Second-Order System
- G(s) = K/(τ²s² + 2ζτs + 1)
- ζ = damping ratio; ζ < 1="" (underdamped),="" ζ="1" (critically="" damped),="" ζ=""> 1 (overdamped)
- Natural frequency: ωn = 1/τ
- Overshoot (for ζ < 1):="" os="">-πζ/√(1-ζ²) × 100%
- Rise time: tr ≈ (1.8/ωn) for ζ = 0.5
2.2.3 Dead Time (Transport Lag)
- G(s) = e-θs
- First-order plus dead time (FOPDT): G(s) = Ke-θs/(τs + 1)
2.3 Block Diagram Algebra

3. PID Control
3.1 PID Controller Equation
- Time domain: u(t) = Kc[e(t) + (1/τI)∫e(t)dt + τD(de/dt)]
- Transfer function: Gc(s) = Kc[1 + 1/(τIs) + τDs]
- Alternative form: Gc(s) = Kc + KI/s + KDs
- KI = Kc/τI; KD = KcτD
3.2 Controller Actions

3.3 Effect of Controller Parameters

3.4 Controller Tuning Methods
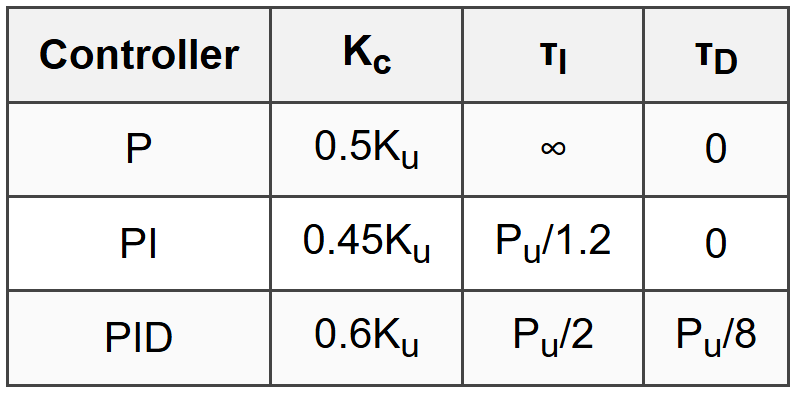
3.4.1 Ziegler-Nichols Closed Loop (Ultimate Gain Method)
- Set τI = ∞, τD = 0; increase Kc until sustained oscillation
- Ku = ultimate gain; Pu = period of oscillation
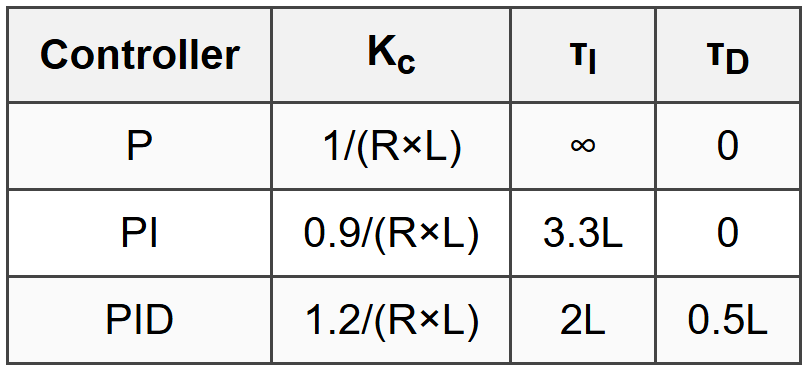
3.4.2 Ziegler-Nichols Open Loop (Reaction Curve Method)
- Apply step change to MV; measure S = slope at inflection point, θ = dead time, K = process gain
- Alternative: R = S/K; L = θ
3.4.3 Cohen-Coon Method
- For FOPDT model: G(s) = Ke-θs/(τs + 1)
- Define: α = θ/τ (dead time to time constant ratio)

3.4.4 IMC (Internal Model Control) Tuning
- For FOPDT: Kc = τ/[K(θ + λ)]; τI = τ; τD = 0
- λ = desired closed-loop time constant (tuning parameter); larger λ = more conservative
4. Stability Analysis
4.1 Routh-Hurwitz Stability Criterion
- Characteristic equation: ansn + an-1sn-1 + ... + a1s + a0 = 0
- Construct Routh array; system stable if all elements in first column have same sign
- Number of sign changes = number of roots in right half-plane (unstable)
4.2 Bode Stability Criterion

4.3 Root Locus Method
- Plots roots of characteristic equation as parameter (Kc) varies
- System stable when all roots in left half of s-plane
- Roots on imaginary axis indicate marginal stability
5. Advanced Control Strategies
5.1 Cascade Control
- Primary (master) controller output sets setpoint for secondary (slave) controller
- Secondary loop responds faster to disturbances
- Tune secondary controller first, then primary
- Secondary loop time constant should be 3-5 times faster than primary
5.2 Feedforward Control
- Measures disturbance and compensates before affecting PV
- Controller: GFF(s) = -Gd(s)/Gp(s)
- Gd = disturbance transfer function; Gp = process transfer function
- Often combined with feedback control
5.3 Ratio Control
- Maintains ratio R = Flow A / Flow B
- Wild stream (uncontrolled flow) measured; captive stream manipulated
- Ratio setpoint adjusted to maintain desired proportion
5.4 Split-Range Control
- Single controller output operates two or more final control elements
- Each valve active over different ranges of controller output
- Example: 0-50% opens cooling valve; 50-100% opens heating valve
5.5 Override (Selective) Control
- Multiple controllers; selector chooses which controller output to use
- Low selector: chooses minimum signal
- High selector: chooses maximum signal
- Used for constraint control and safety
5.6 Model Predictive Control (MPC)
- Uses dynamic process model to predict future behavior
- Optimization performed at each time step over prediction horizon
- Handles multivariable systems and constraints
- Control horizon < prediction="">
6. Process Dynamics and Identification
6.1 Process Reaction Curve
- Open-loop step test to characterize process dynamics
- Graphical method: draw tangent at inflection point
- Dead time θ = time intercept; time constant τ = time to 63.2% of final value
- Process gain K = Δy/Δu (steady state)
6.2 Self-Regulating vs. Integrating Processes

6.3 Inverse Response
- Initial response in opposite direction to final response
- Right-half-plane zero in transfer function
- Requires slow controller tuning to avoid instability
7. Control Valve Sizing and Characteristics
7.1 Valve Flow Equation
- Q = Cv√(ΔP/Gf) for liquids
- Q = flow (gpm); Cv = valve coefficient; ΔP = pressure drop (psi); Gf = specific gravity
- For gases: Q = CvP₁√(x/GgT₁) with corrections for x = ΔP/P₁
7.2 Inherent Valve Characteristics

7.3 Installed Characteristics
- Actual flow vs. stroke under operating conditions
- Affected by system pressure drop distribution
- Equal percentage valve becomes more linear when installed
7.4 Valve Action

8. Controller Action and Loop Configuration
8.1 Controller Action Selection

8.2 Overall Loop Gain
- KOL = Kc × Kv × Kp × Km
- Kc = controller gain; Kv = valve gain; Kp = process gain; Km = measurement gain
- For stability: KOL must be negative (closed loop with negative feedback)
8.3 Pairing Variables in Multivariable Systems
- Relative Gain Array (RGA): λij = (∂yi/∂uj)other loops open / (∂yi/∂uj)other loops closed
- Pair variables where λij closest to 1.0
- Avoid pairing where λij < 0="" (interaction="" causes="">
9. Common Process Control Applications
9.1 Level Control
- Averaging level control: loose control (large τI) to smooth flow variations
- Tight level control: fast response for precise control
- Integrating process: requires proportional or PI control only
9.2 Flow Control
- Fast process dynamics; use PI control with small τI
- Square root compensation needed for differential pressure flow measurement
- Flow control often used as secondary loop in cascade
9.3 Pressure Control
- Gas systems: fast response, potential for oscillation
- Liquid systems: slower, more stable
- Often use wide proportional band to prevent valve chattering
9.4 Temperature Control
- Large time constants and dead time; use PID control
- Heating/cooling systems benefit from cascade control
- Thermal processes often have long settling times
9.5 Distillation Column Control
- Fix 5 degrees of freedom: feed flow (external), reflux, distillate, bottoms, heat input
- Material balance control: L/D or V/B ratio
- Energy balance control: reflux ratio or boilup ratio
- Dual composition control: control both top and bottom product quality
9.6 Heat Exchanger Control
- Manipulate hot or cold stream flow rate
- Cascade: temperature controller sets flow controller setpoint
- Bypass control: split cold stream around exchanger
10. Performance Metrics
10.1 Time-Domain Performance Criteria

10.2 Offset
- Steady-state error between setpoint and process variable
- Proportional control has offset; PI and PID eliminate offset
- Offset = 1/(1 + KcKp) for P control with unit step disturbance
11. Instrumentation and Sensors
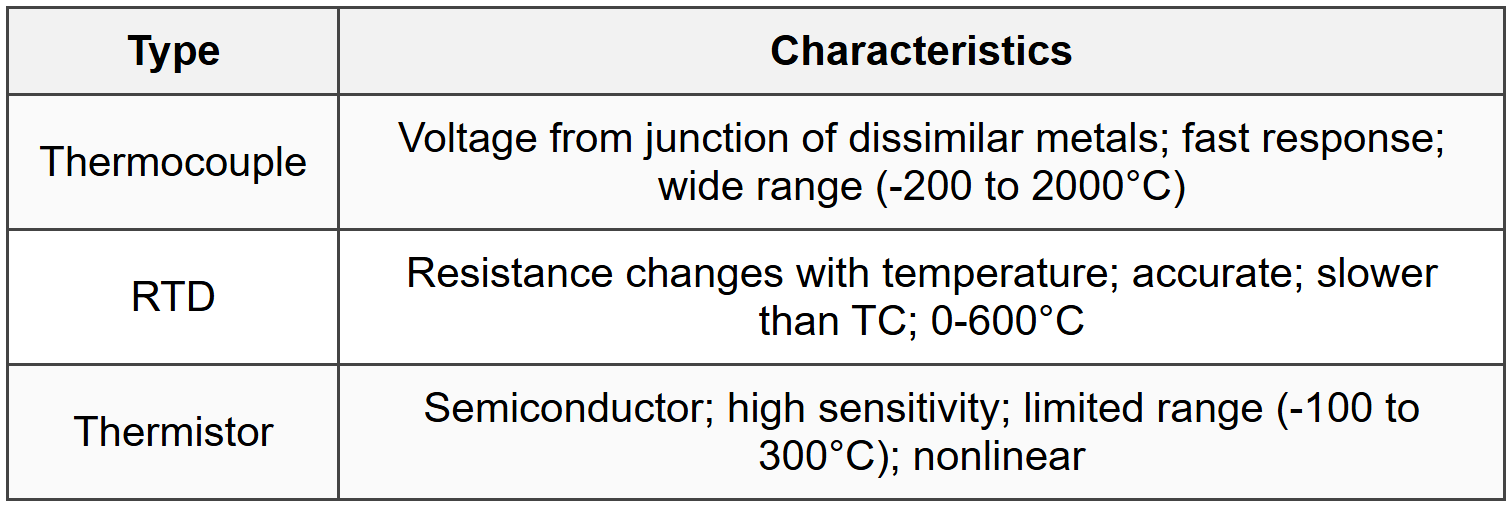
11.1 Temperature Sensors
11.2 Pressure Sensors
- Bourdon tube: mechanical deflection; 0-100,000 psi
- Diaphragm: pressure causes deflection measured capacitively or with strain gauge
- Piezoelectric: generates voltage under pressure; dynamic measurements
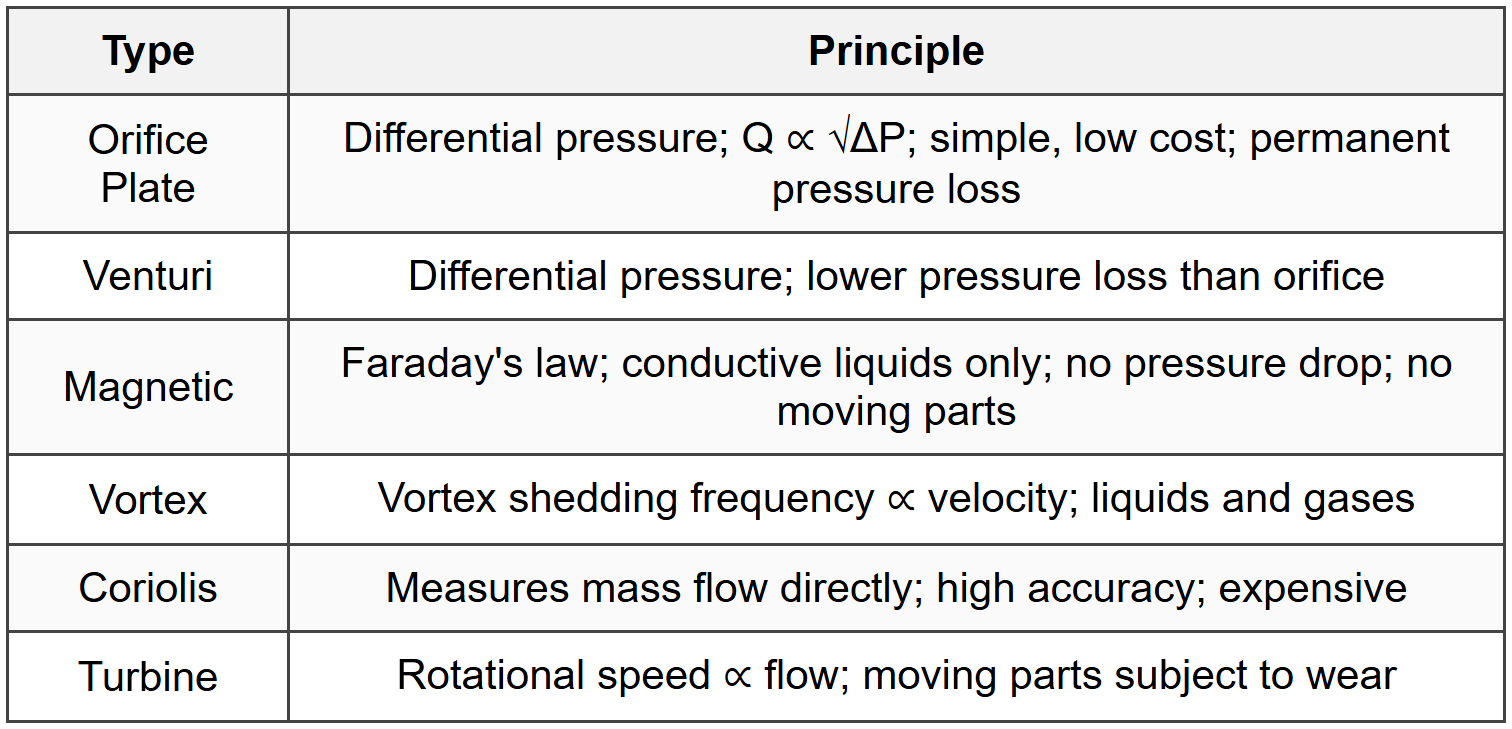
11.3 Flow Measurement
11.4 Level Measurement
- Differential pressure: ΔP = ρgh; affected by density changes
- Float: mechanical; simple, reliable
- Capacitance: dielectric between plates changes with level
- Ultrasonic: time-of-flight measurement; non-contact
- Radar: microwave reflection; handles vapor, foam, turbulence
11.5 Signal Standards

12. Frequency Response
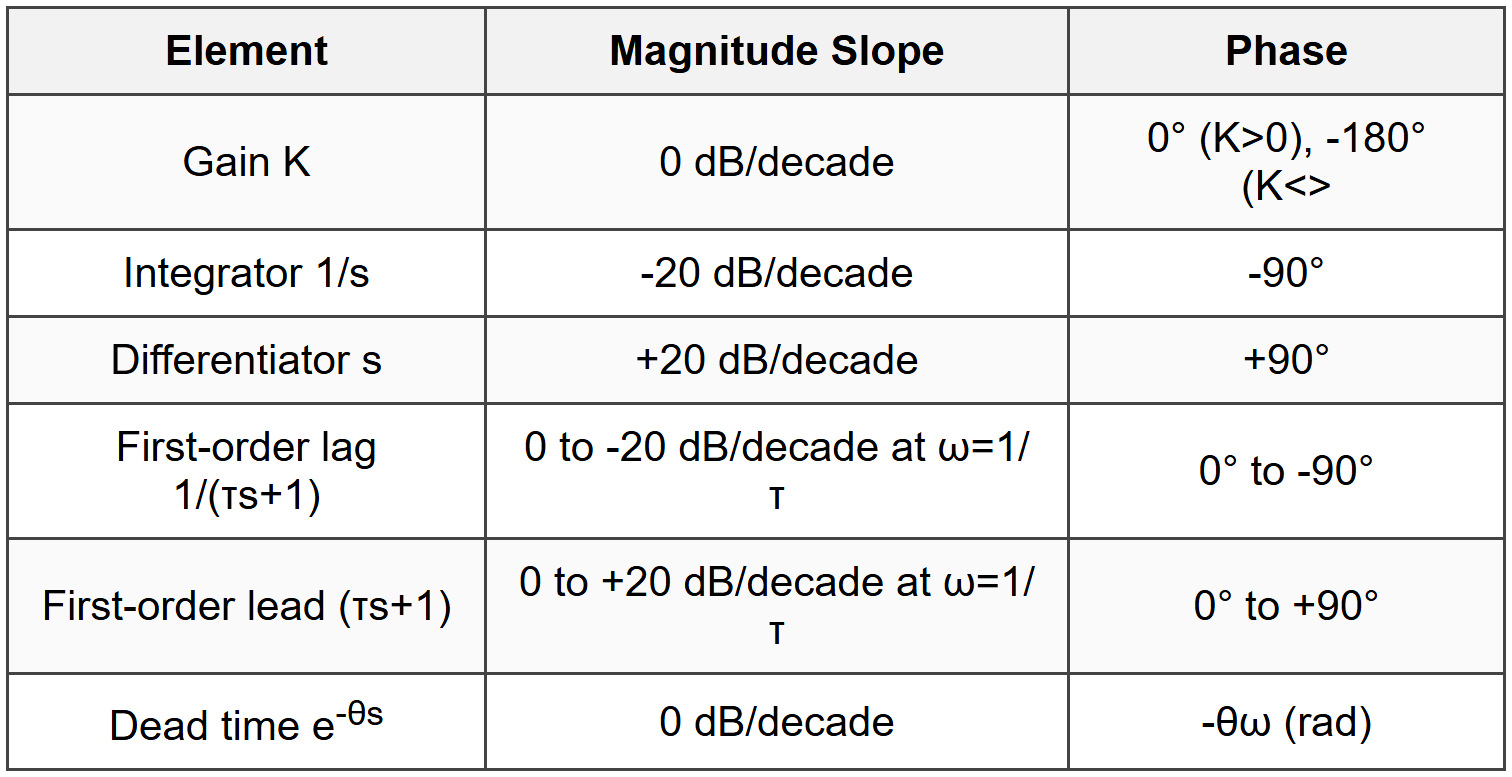
12.1 Bode Plot Basics
- Magnitude plot: 20 log₁₀|G(jω)| vs. log ω (dB vs. frequency)
- Phase plot: ∠G(jω) vs. log ω (degrees vs. frequency)
- ω = frequency (rad/time)
12.2 Common Transfer Function Elements
12.3 Bandwidth
- Frequency range where |G(jω)| > -3 dB (70.7% of DC gain)
- Wider bandwidth = faster response
The document Cheatsheet: Process Control is a part of the PE Exam Course Chemical Engineering for PE.
All you need of PE Exam at this link: PE Exam
About this Document

Apr 20, 2026 Last updated
Related Exams
Document Description: Cheatsheet: Process Control for PE Exam 2026 is part of Chemical Engineering for PE preparation. The notes and questions for Cheatsheet: Process Control have been prepared according to the PE Exam exam syllabus. Information about Cheatsheet: Process Control covers topics like and Cheatsheet: Process Control Example, for PE Exam 2026 Exam. Find important definitions, questions, notes, meanings, examples, exercises and tests below for Cheatsheet: Process Control.
Introduction of Cheatsheet: Process Control in English is available as part of our Chemical Engineering for PE for PE Exam & Cheatsheet: Process Control in Hindi for Chemical Engineering for PE course. Download more important topics related with notes, lectures and mock test series for PE Exam Exam by signing up for free. PE Exam: Cheatsheet: Process Control
Description
Cheatsheet: Process Control of Chemical Engineering to help you remember important concepts with short tricks. Start learning for PE Exam exam & improve retention with EduRev.
Information about Cheatsheet: Process Control
In this doc you can find the meaning of Cheatsheet: Process Control defined & explained in the simplest way possible. Besides explaining types of Cheatsheet: Process Control theory, EduRev gives you an ample number of questions to practice Cheatsheet: Process Control tests, examples and also practice PE Exam tests


Related Searches
pdf , past year papers, MCQs, practice quizzes, Cheatsheet: Process Control, Exam, shortcuts and tricks, Semester Notes, Important questions, mock tests for examination, study material, video lectures, Summary, Free, Sample Paper, Extra Questions, Previous Year Questions with Solutions, Cheatsheet: Process Control, Objective type Questions, Viva Questions, ppt, Cheatsheet: Process Control;