Vibrations


VIBRATIONS
Any motion that exactly repeats itself after a certain interval of time is called periodic motion. A periodic motion which is a to-and-fro motion about an equilibrium position is called a vibration. Vibrations are classified and analysed to determine natural frequencies, response to forcing, and stability of mechanical systems such as shafts, beams, springs and rotors.
Types of Vibration
- Free vibrations : Vibrations that occur after an initial disturbance when no external force acts on the system (except possible internal resistance). If there is no damping, these are called undamped free vibrations; when damping is present they decay in amplitude and are called damped free vibrations.
- Forced vibrations : Vibrations produced by a time-varying external force applied continuously to the system. The steady-state response frequency is usually that of the applied force and may differ from the system natural frequency.
- Damped vibrations : Vibrations in which energy is gradually dissipated due to friction, material internal friction or fluid resistance. The amplitude decreases with time.
- Undamped vibrations (hypothetical) : Idealised vibrations neglecting any resistance or damping; amplitude remains constant indefinitely.
- Longitudinal vibrations : Vibrations in which particles move along the axis of the body (extension and compression), producing alternating tensile and compressive stresses in the shaft or rod.
- Transverse vibrations : Vibrations in which particles move perpendicular to the axis (bending), producing alternating tensile and compressive stresses due to bending.
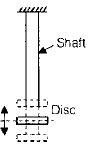
- Torsional vibrations : Vibrations in which the body twists about its longitudinal axis, producing alternating torsional shear stresses.
Basic Elements of a Vibrating System
- Inertial element : Represented by lumped mass (for rectilinear motion) or lumped moment of inertia (for angular motion). Inertia resists acceleration.
- Restoring element : Represented by springs (linear for rectilinear, torsional for angular) that produce a force or moment proportional to displacement and tend to restore the system to equilibrium.
- Damping element : Represented by dashpots or other dissipative elements that remove energy from the system, with a damping force usually modelled proportional to velocity for small speeds.
Free Longitudinal Vibration
Methods commonly used to find the natural frequency of simple vibrating systems are the equilibrium (D'Alembert) method, the energy method and Rayleigh's method. Each gives the same result for simple systems when applied correctly.
Equilibrium Method (D'Alembert)
- The method is based on D'Alembert's principle: a dynamic problem is transformed to a static one by introducing inertial forces. At any instant the algebraic sum of external, internal and inertial forces is zero for a body in dynamic equilibrium.
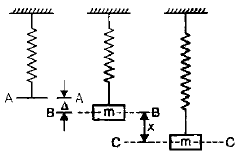
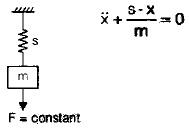
Consider a mass m attached to a spring of stiffness S (or k). Let x be the small longitudinal displacement from mean position, a the acceleration, and s the stiffness.
Inertia force (opposite to acceleration) = m

Spring (restoring) force = s x (upwards)
Equating forces (including sign convention) gives the differential equation of motion for free longitudinal vibration.

This is the standard equation of simple harmonic motion and is analogous to the form shown below.

- The general solution is of the form involving sine and cosine terms with angular natural frequency ωn.

where A and B are constants determined from initial conditions (initial displacement and velocity).

- Linear (natural) frequency

Time period
Energy Method
In a conservative (undamped) system the total mechanical energy (sum of kinetic and potential energies) is constant. Equate maximum kinetic energy at mean position to maximum potential energy at extreme position to obtain natural frequency.
Assume velocity v =

From energy balance one obtains the same differential equation or frequency relation:
Rayleigh's Method
- Assume a plausible mode shape (often the first mode) and equate maximum kinetic energy to maximum potential (strain) energy. This gives an approximate natural frequency; for exact mode shapes it gives the exact frequency.
Assume simple harmonic motion x = X sin ωn t where X is the amplitude.
Therefore, at mean position maximum kinetic energy = at extreme position maximum potential energy.
Inertial Effect of the Mass of the Spring
If the spring itself has mass m1, part of the spring's mass contributes to the effective inertia of the oscillating system. The effect is taken into account by adding an equivalent mass of the spring to the lumped mass.
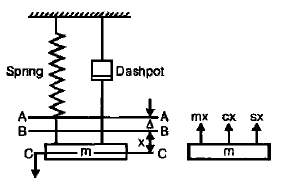
Damped Longitudinal Vibration
- Damping is the gradual loss of vibratory energy due to molecular internal friction, resistance from the surrounding medium (air, fluid), bearings etc. Damped vibrations reduce in amplitude with time.
Assumptions:
- Damping force is approximately proportional to velocity for small velocities (linear viscous damping). At higher speeds the damping may vary as the square of velocity, but linear viscous model is standard for many analyses.
Let s be the spring stiffness, c the damping coefficient (force per unit velocity), wn the undamped natural angular frequency, x(t) the displacement, v =

Applying D'Alembert's principle (sum of inertial and other forces equals zero) yields the damped equation of motion for longitudinal vibration.
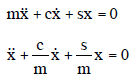
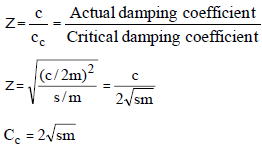
Damping factor (damping ratio)
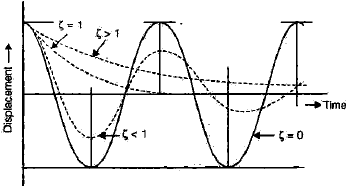
| Points to Remember ζ = 1, the damping is critical ζ > 1, the system is over-damped ζ < 1, the system is under-damped |
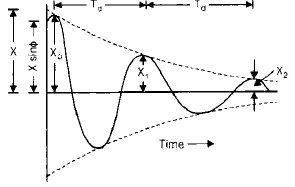
Logarithmic decrement (δ) : In an under-damped system the ratio of successive amplitudes is constant; the natural logarithm of this ratio is called the logarithmic decrement. It provides a measure of damping from observed decay of free oscillations.
Forced Vibration
When a time-varying external force acts on a system, the motion consists of a transient part (depends on initial conditions and decays if system is damped) and a steady-state part that oscillates at the forcing frequency.
- Step-input force
- Harmonic force
Forced Damped Vibrations
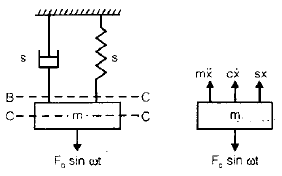
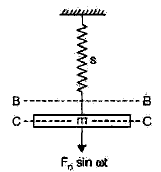
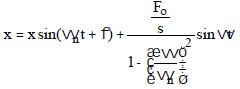
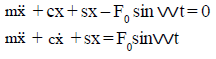
Consider a mass subjected to an impressed oscillating force F = F0 sin ωt. The forces acting on the mass at any instant are:
- Impressed oscillating force (downwards): F = F0 sin ωt
- Inertial force (opposite to acceleration): m
- Damping force (opposite to velocity): c
- Spring restoring force (opposite to displacement)
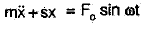
Summing forces and equating to zero gives the forced damped differential equation of motion.
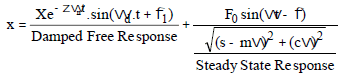
The steady state amplitude and phase depend on the forcing frequency ω, the undamped natural frequency ωn, and the damping coefficient c (or damping ratio ζ). Near resonance (forcing frequency close to natural frequency) amplitudes can become large unless sufficient damping is present.
Transverse Vibration
Transverse vibrations occur in beams and shafts and their natural frequencies depend on geometry, support conditions and loading. The study of transverse vibration is essential for shafts, beams, rotors and long slender components.
- For shafts and beams whose own mass is negligible compared to attached concentrated masses, the restoring force is proportional to the transverse deflection of the mass from equilibrium.
For common support conditions the equivalent stiffness (for transverse motion of a concentrated mass) is:

for cantilever supporting a concentrated mass at the free end.

for simply supported beam with a central concentrated mass.

for beams fixed at both ends.
Note: A shaft supported in long bearings is commonly modelled as fixed at both ends, while a shaft in short bearings may be treated as simply supported, depending on the constraint provided by the bearings.
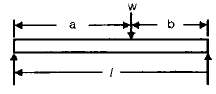
Uniformly Loaded Shaft (Simply Supported)
- A simply supported shaft carrying a uniformly distributed mass has maximum deflection at mid-span and a set of natural frequencies determined by its bending stiffness and mass distribution.
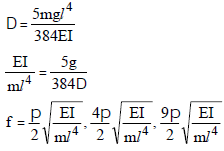
Taking the smallest (first) value of the frequency gives the fundamental frequency f1.

Note on modes and frequencies:
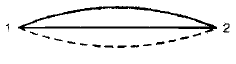
- The lowest frequency of transverse vibrations is called the fundamental frequency. For a simply supported beam it has a node at each end and one antinode at mid-span.
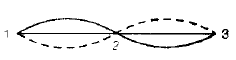
- The next higher mode for a simply supported beam often has a frequency four times the fundamental and contains additional nodes and antinodes (three nodes counting ends appropriately).
- The following higher mode can be nine times the fundamental for idealised uniform cases. In general, a continuous beam or shaft has infinitely many natural frequencies (modes).
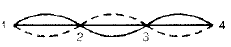
- Thus a simply supported shaft will have an infinite number of transverse natural frequencies under uniformly distributed load. Cantilevers and shafts fixed at both ends have different mode shapes and frequency sequences and can be analysed similarly.
Shaft Carrying Several Loads
A. Dunkerley's Method
- Dunkerley's method is a simple semi-empirical technique to estimate the lowest natural frequency of a shaft carrying several masses at different positions. It gives approximate results but is easy to use and often conservative (predicts lower frequency than exact).
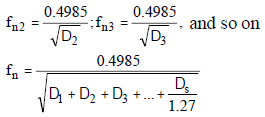
Let fn be the frequency of transverse vibration of the whole system, fns the frequency with the distributed load acting alone, and fn1, fn2, fn3... be the frequencies when each concentrated load w1, w2, w3... acts alone. Dunkerley's empirical formula is written as follows to estimate the combined effect:
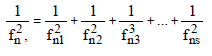
where the terms combine the inverse squares (or appropriate inverse relation) of individual contributions to obtain an approximate overall inverse square. The detailed form and derivation for specific cases are shown in the referenced formulae.
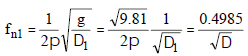
Similarly, combined contributions of other loads are added in the same inverse manner.
B. Energy Method
- The energy (Rayleigh-Ritz) method gives more accurate results but requires heavier calculation when many loads or degrees of freedom are present. It is based on equating maximum potential and kinetic energies for assumed mode shapes.
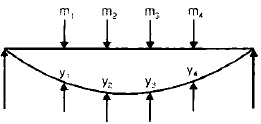
Maximum potential energy is given by:
Maximum kinetic energy is given by:
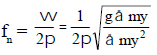
Circular frequency ω is obtained from the energy ratio:
Whirling of Shaft
- When a rotor or disk mounted on a shaft has its mass centreline eccentric to the shaft axis, rotation produces centrifugal forces that tend to bend the shaft. This bending increases eccentricity and centrifugal force further - leading to a dynamic instability known as whirling (or whipping).
- The critical (whirling or whipping) speed is the rotational speed at which the shaft tends to vibrate violently in the transverse direction. Operating at or near a critical speed is dangerous and must be avoided or controlled (for instance, by design changes or damping).
Practical Remarks and Applications
- Identification of natural frequencies and mode shapes is essential for safe mechanical design of rotating machinery, shafts, beams, engines, and structural components to avoid resonance with operational or environmental forcing frequencies.
- Damping reduces resonant amplitudes and is introduced via material selection, structural damping, dampers, or tuned mass dampers in engineering practice.
- Design standards often require that operating speeds be well separated from fundamental critical speeds or that sufficient damping is provided where separation is not feasible.
- Simple analytical methods (equilibrium, energy, Rayleigh, Dunkerley) are useful for hand-calculations and initial design checks; finite element and numerical methods are used for detailed and complex geometries.
Summary : Vibrations are periodic to-and-fro motions classified as free, forced, damped and undamped, and as longitudinal, transverse or torsional depending on the motion direction. Natural frequency, damping ratio and mode shapes govern dynamic behaviour. Methods such as equilibrium (D'Alembert), energy and Rayleigh provide frequencies for simple systems; Dunkerley and energy methods help estimate frequencies for multi-load shafts. Whirling of shafts due to rotor eccentricity is a critical design concern requiring avoidance of operation at critical speeds or provision of adequate damping.
FAQs on Vibrations
| 1. What is vibration in mechanical engineering? |  |
| 2. How does vibration affect mechanical systems? | |
| 3. What are the common sources of vibration in mechanical systems? | |
| 4. How is vibration measured and analyzed in mechanical engineering? | |
| 5. How can vibration in mechanical systems be controlled or reduced? | |




