Polyphase Synchronous Machines - 4 - Electrical Engineering (EE) PDF Download

Alternator
• When excitation emf is Ef1, the alternator is underexcited and the armature current la1 is leading Vt = Vb = bus-bar voltage.
• For Ef1 , underexcited alternator operates at a leading and absorbs reactive power from infinite bus.
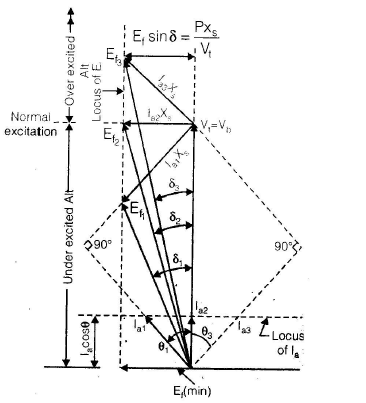
Effect of field current on an alternator connected to infinite bus
• With an increase in field current, excitation emf rises. For excitation emf Ef2 , armature current la2 is im phase with Vt = Vb. Under unity pf operation, the alternator is said to be normally excited and it neither delivers nor absorbs reactive power. For Ef3 more than Ef2, la3 lag Vt. The overexcited alternator operates at a lagging pf and delivers reactive power to infinite bus.
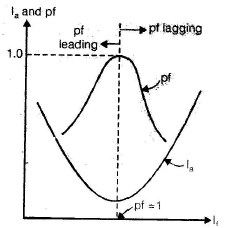
• Just like a synchronous motor, plot of la versus lf is called V-curve of a alternator connected to an infinite bus. The power factor versus field current curve, known as inverted V-curve.
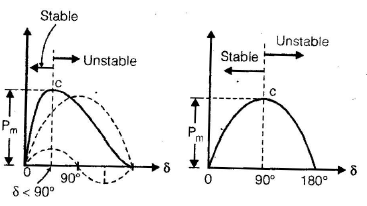
POWER-ANGEL CHARACTERISTICS
Cylindrical-rotor synchronous Machine
• A generator and is feeding power to an infinite bus of constant voltage Vt.
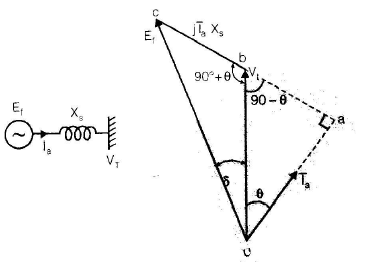
Salient pole synchronous generator single line diagram and phasor diagram for a lagging pf
• The per phase power delivered to the infinite bus
P=Vtla cosθ
Salient-pole Synchronous Machine
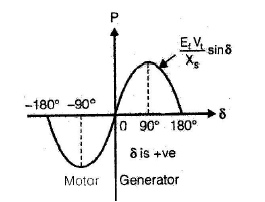
• The per phase power delivered to the bus.

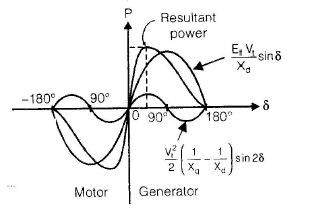

• The total power consists of a fundamental component  and a second harmonic component
and a second harmonic component  sin2δ
sin2δ
• For a salient pole synchronous generator, the per phase reactive power in terms of power angle δ and for a lagging power facor is given by

• The synchronizing power coefficient is a measure of the stiffness of electromagnetic coupling between stator and rotor fields. Too large stiffness of coupling means that the motor tends to follow closely, the variation of speed caused by the disturbance in electric power supply. In case there is no power-supply disturbance, then too much stiffness coupling would cause the motor speed to remain practically constant, regardless of the mechanical load fluctuations.
SYNCHRONOUS MACHINE STABILIYT
• A synchronous machine connected to an infinite bus is said to be working in a stable condition, if it is in synchronism or in step with the bus.
Stability
• The tendency of a synchronous mechine to develop forces so as to maintain synchronism and equilibrium is called stability.
Stability Limit
• A stability limit represents the maximum power flow possible, when the synchronous machine is operating with stability.
Steady state stability Limit
• The maximum power flow possible through a particular point without loss of stability, when the power is increased very gradually.
• The steady-state limit can be improved upon as follows:
- Synchronous machine excitation should be increased, so that Ef becomes more.
- Reactance should be decreased, e.g. two transmission lines in parallel would reduce the line reactance to half.
- Series capacitors may be used to reduce the line reactance.
HUNTING
• A synchronous machine operates satisfactorily, if the mechanical speed to the rotor is equal to the stator field speed.
• Any departure from these conditions, gives rise to synchronizing forces which tend to maintain this equality.
• Phenomenon, involving the oscillations of the rotor about its final equilibrium position, is called hunting.
• During the rotor oscillations or hunting. the orientation of phasor Ef changes relative to fixed voltage Vt and because of this reason, hunting is also called phase-swinging.
Reduction of Hunting
• Damper windings.
• Use of flywheels which helps in maintaining the
rotor speed constant.
• By using suitable synchronizing power coefficient.
DAMPER WINDINGS
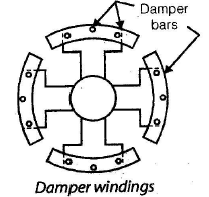
• Damper windings consist of low- resistance copper. brass or aluminium bars embedded in slots in the pole-faces of salient-poles machines. The projecting ends of the bars are connected to short circuiting strips of the same material asused for the bars. Sometimes interpolar connectors are omitted to form incomplete type of damper winding.
NOTE:
• In damper winding techniques, for reducing hunting resistance (Rd) of damper windings should be minimum, While for good starting torque, damper bars should have a low resistance therefore we have to make compromise in the value of damper winding resistance. it should be in between two.
• In alternator, the value of damper winding resistance should be low for minimizing hunting.
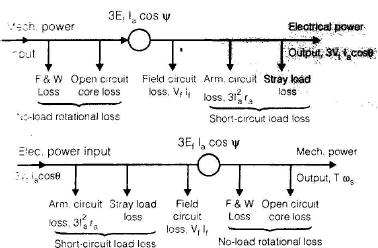
EFFICIENCY OF SYNCHRONOUS MACHINES
• The various losses in synchronous machines are:
- NO-load rotational losses
(a) friction and winding loss and
(b) open circuit core loss.
- Field circuit loss
(c) l2 R loss in armature winding.
- Direction load loss
(d) l2 R loss in armature winding.
- Stray load losses
(e) in iron and
(f) in the armature conductors.
• The combination of direct load loss and stray load losses is referred to as shot circuit load loss.
The Stray load loss consists of two components, namely:
• iron losss or core loss due to armature leakage flux and
• armature ohmic loss due to skin effect and eddy currents in the armature conductors.
POWER FLOW DIAGRAMS
• NO- load rotational loss
Pr = Friction and windage loss + open-circuit loss pr + vf lf = constant losses Short=circuit load loss - 3la2.ra + stray- load loss.
• Maximum efficiency in a synchronous machine occurs when variable losses = constant losses. or 3la2.ra = Pr +Vf .lf where lam is the armature current at which maximum efficiency occurs in the synchronous machine.
• Total alternator losses = F.W.loss + open-circuit core loss + short-circuit load loss + field - circuit loss.
= Wf + W2 + W3 + Vf lf
STARTING OF SYNCHRONOUS MOTOR
• A synchronous motor is not self starting. It can be started by the following two methods.
- Startin with the help of an external prime mover.
- Startin with the help of damper windings.
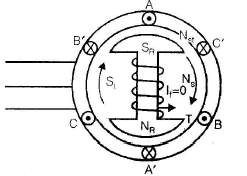
Stator field rotates at NS
at starting Nr = 0
Let, Ns = 1500 rpm
1 rev 
half rev 
At starting rotor field stationary and stator field is rotating at h higher speed that is synchronous. Due to the interaction between rotor and stator poles, the torque developed reverses after each half revolution of stator field. Due to its inertia rotor can not respond so quickly hence it remains stationary that's whey synchronous motor is non self-stationary that's why synchronous motor is non self- starting if by some external means rotor is made to rotate at a speed close to synchronous then due to the locking of stator and rotor field rotor will continue to rotate at synchronous speed.
Damper winding
• Solid copper (cu) or Aluminium (Al) are embedded in the slots cut in the pole shoe and short circuited by end rings like squirrel cage induction motor (SCIM).
At starting no-field excitation is given, so there is relative motion between damper winding and stator field.
Ns - Nr = Ns - 0 = Ns
• AT Starting no excitation is given to the rotor, Due to the relative motion between damper winding and stator field the induced current in damper winding opposes the relative motion and hence starting torque is produced due to induction motor principle and rotor start rotating at a speed some what less than synchronous. Now dc excitation is given and stator and rotor field remains continue to rotates at synchronous speed, when rotates at synchronous speed there is no relative motion between damper winding and stator field. No induced current in the damper winding hence no role of the damper winding in steady state.
FAQs on Polyphase Synchronous Machines - 4 - Electrical Engineering (EE)
| 1. What is a polyphase synchronous machine? |  |
| 2. What are the main advantages of polyphase synchronous machines? | |
| 3. How does a polyphase synchronous machine generate electricity? | |
| 4. What is the difference between polyphase synchronous machines and induction machines? | |
| 5. Can polyphase synchronous machines be used as motors? | |


Polyphase Synchronous Machines - 4 - Electrical Engineering (EE)
,Polyphase Synchronous Machines - 4 - Electrical Engineering (EE)
,ppt
,Free
,Polyphase Synchronous Machines - 4 - Electrical Engineering (EE)
,mock tests for examination
,practice quizzes
,Exam
,Sample Paper
,Semester Notes
,Viva Questions
,Extra Questions
,video lectures
,Summary
,study material
,Previous Year Questions with Solutions
,shortcuts and tricks
,Important questions
,past year papers
,MCQs
,Objective type Questions
;






Polyphase Synchronous Machines - 4 Free PDF Download
Importance of Polyphase Synchronous Machines - 4
Polyphase Synchronous Machines - 4 Notes
Polyphase Synchronous Machines - 4 Electrical Engineering (EE) Questions
Study Polyphase Synchronous Machines - 4 on the App
|
© EduRev
|
Education Revolution
|



|





