FIR Filters | Signals and Systems - Electronics and Communication Engineering (ECE) PDF Download

In digital signal processing, there are two main types of filters: FIR and IIR.
FIR filters have a finite impulse response, which means they settle to zero in a fixed amount of time. This is different from IIR filters, which can keep responding indefinitely.
An FIR filter of order N takes N+1 samples to settle to zero.
Let us study Fourier Series Method to design an FIR Filter.
Fourier series Method
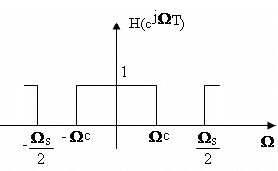
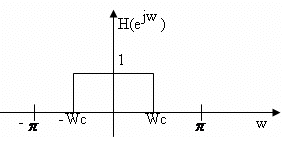
1. Frequency response of a discrete-time filter is a periodic function with period Ωs (sampling freq).
2. From the F.S analysis we know that any periodic function can be expressed as a linear combination of complex exponentials.
Desired Frequency Response
The desired freqency response of a discrete time filter can be represented by F.S as
where, T = sampling period
Fourier Series Coefficient
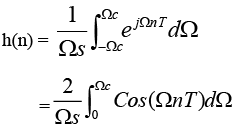
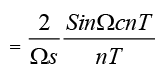
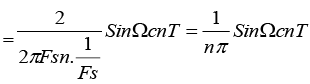
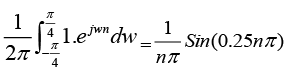
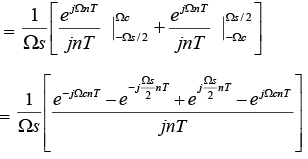
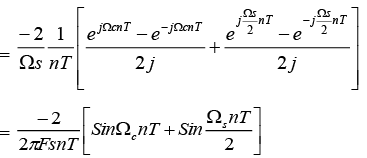
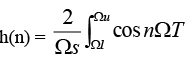
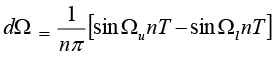
The F.S coefficient or impulse response samples of filter can be obtained using

clearly if we wish to realize this filter with impulse response h(n), then it must have finite number of coefficients, which is equivalent to truncating the infinite expansion of H(e jΩT) ,which leads to approximation of (e jΩT ) which is denoted by
We choose m=n-1/2, in order to keep ‘n’ no of samples in h(n).
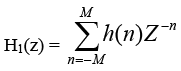
However, this filter can’t be physically realizable due to the presence of +ve powers of Z, means that the filter must produce an output that is advanced in time with respect to the i/p. this difficulty can be overcome by introducing a delay M=N-1/2, samples.
Therefore H(z) = Z-M H1(z) = Z-M 
H(z) = h(-M)Z0 + h(-M+1) Z-1 +…. +h(M) Z-2M
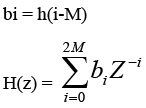
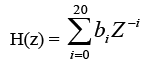
Let bi = h(i-M) for i=0 to 2M
H(z) =  be the transfer function of discrete filter that is physically realizable.
be the transfer function of discrete filter that is physically realizable.
Properties
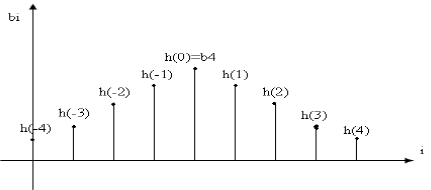
1. N=2M+1, impulse response co-eff, bi = 0 to 2M.
2. h(n) is symmetric about bM
Ex: M=4
3. The duration of impulse response is Ti = 2MT
4. Its magnitude and time delay function can be found in the following way
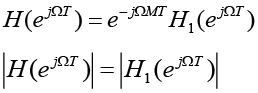
This implies that magnitude response of the filter we have desired approximates the desire magnitude response. The time delay of H(ejw) is a constant M. thus sinusoids of different frequencies are delayed by the same amount as they are processed by the filter, we have designed. Consequently, this is a linear phase filter, which means that it does not introduce phase distortion.
Example 1:
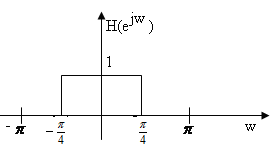
Design a LPF (FIR) filter with frequency response
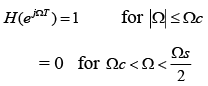
Solution:
Example 2:
Design LPF that approximate following frequency response.
H(F) = 1 0≤ F ≤ 1000Hz
= 0 else where 1000 ≤ F≤ Fs/2
When the sampling frequency is 8000 SPS (Samples per second). The impulse response duration is to be limited to 2.5ms.
Solution:
 N=21
N=21


OR
h(0) = 0.25 h(6) = -0.05305
h(1) = 0.22508 h(7) = -0.03215
h(2) = 0.15915 h(8) = 0
h(3) = 0.07503 h(9) = 0.02501
h(4) = 0 h(10) = 0.03183
h(5) = -0.04502
bi = h(i-10)
FIR HPF

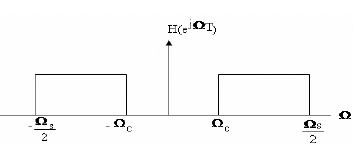

FIR BPF
Example:
Desing a BPF for H(f) = 1 160≤ F ≤ 200Hz
= 0 else where
Fs = 800 SPS and Ti = 20 ms
Solution:
 N = 17
N = 17


h(0) = 0.1 h(4) = 0.07568
h(1) = 0.01558 h(5) = 0.06366
h(2) = -0.09355 h(6) = -0.05046
h(3) = -0.04374 h(7) = -0.07220 h(8) = 0.02338
bi = h(i-8) h(-n) = h(n)
|
36 videos|117 docs|63 tests
|
FAQs on FIR Filters - Signals and Systems - Electronics and Communication Engineering (ECE)
| 1. What is a FIR filter? |  |
| 2. How does a FIR filter work? | |
| 3. What are the advantages of FIR filters? | |
| 4. What are the limitations of FIR filters? | |
| 5. How can FIR filters be designed? | |


FIR Filters | Signals and Systems - Electronics and Communication Engineering (ECE)
,Viva Questions
,Summary
,practice quizzes
,video lectures
,Objective type Questions
,mock tests for examination
,Extra Questions
,past year papers
,study material
,shortcuts and tricks
,Important questions
,Previous Year Questions with Solutions
,FIR Filters | Signals and Systems - Electronics and Communication Engineering (ECE)
,Free
,Exam
,Sample Paper
,ppt
,Semester Notes
,MCQs
,FIR Filters | Signals and Systems - Electronics and Communication Engineering (ECE)
;


FIR Filters Free PDF Download
Importance of FIR Filters
FIR Filters Notes
FIR Filters Electronics and Communication Engineering (ECE) Questions
Study FIR Filters on the App
|
© EduRev
|
Education Revolution
|



|






within 7 days!