GATE Electrical Engineering (EE) Test: Introduction to Systems Free Online
MCQ Practice Test & Solutions: Test: Introduction to Systems (10 Questions)
You can prepare effectively for Electrical Engineering (EE) GATE Electrical Engineering (EE) Mock Test Series 2027 with this dedicated MCQ Practice Test (available with solutions) on the important topic of "Test: Introduction to Systems". These 10 questions have been designed by the experts with the latest curriculum of Electrical Engineering (EE) 2026, to help you master the concept.
Test Highlights:
- - Format: Multiple Choice Questions (MCQ)
- - Duration: 30 minutes
- - Number of Questions: 10
Sign up on EduRev for free to attempt this test and track your preparation progress.

A function f(t) is an even function, if for all values of (t)
( T is the time-period of the function)
Detailed Solution: Question 1
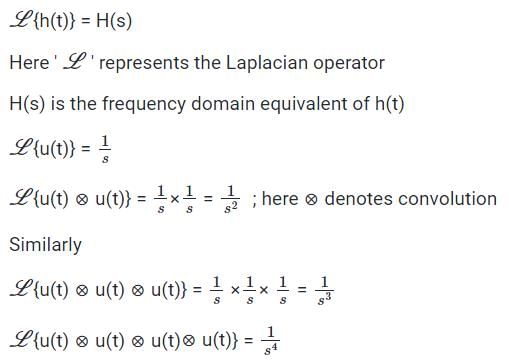
A control system transfer function is H(s) = 1/s3. Express its impulse response in terms of unit step signal
Detailed Solution: Question 2

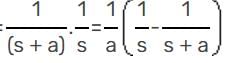
The unit impulse response of a linear time invariant system is the unit step function u(t) for t > 0, the response of the system to an excitation e-at u(t), a > 0 will be
Detailed Solution: Question 3
A system with an input x(t) and output y(t) is described by the relation: y(t) = tx(t). This system is
Detailed Solution: Question 4
If a function f(t) u(t) is shifted to the right side by t0, then the function can be expressed as
Detailed Solution: Question 5

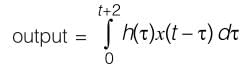
The impulse response of a causal, linear, time- invariant, continuous time system is h(t). The output y(t) of the same system to an input x(t). Where x(t) = 0 for t < -2 is
Detailed Solution: Question 6
The unit step response of a system is given by (1 - e-αt) u(t), the impulse response is given by
Detailed Solution: Question 7
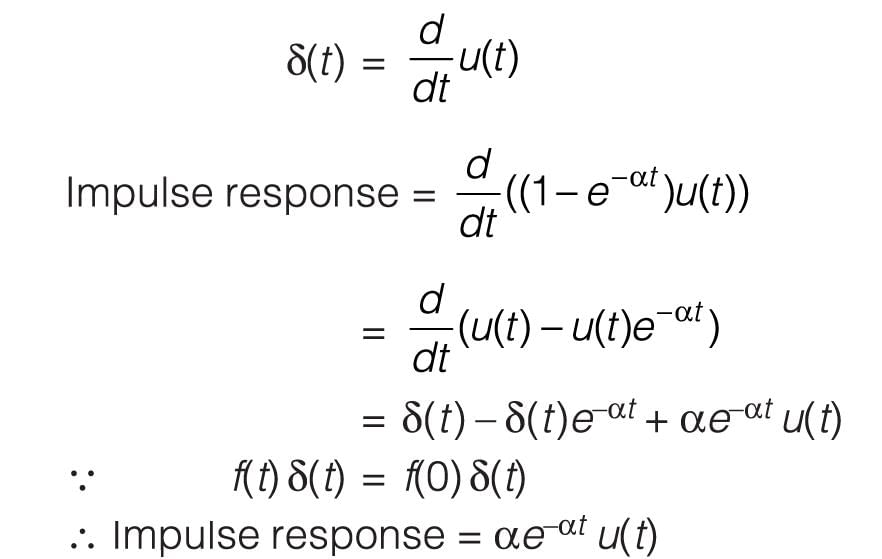
Figure I and Figure II, shows the input x(t) to a linear time invariant system and the impulse response h(t) of the system
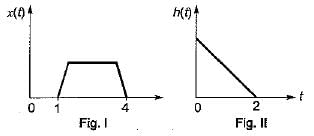
the output of the system is zero everywhere except for the time interval.
the output of the system is zero everywhere except for the time interval.
Detailed Solution: Question 8
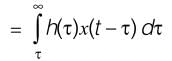
 ∞x(τ) h(t – τ)dτ– ∞
∞x(τ) h(t – τ)dτ– ∞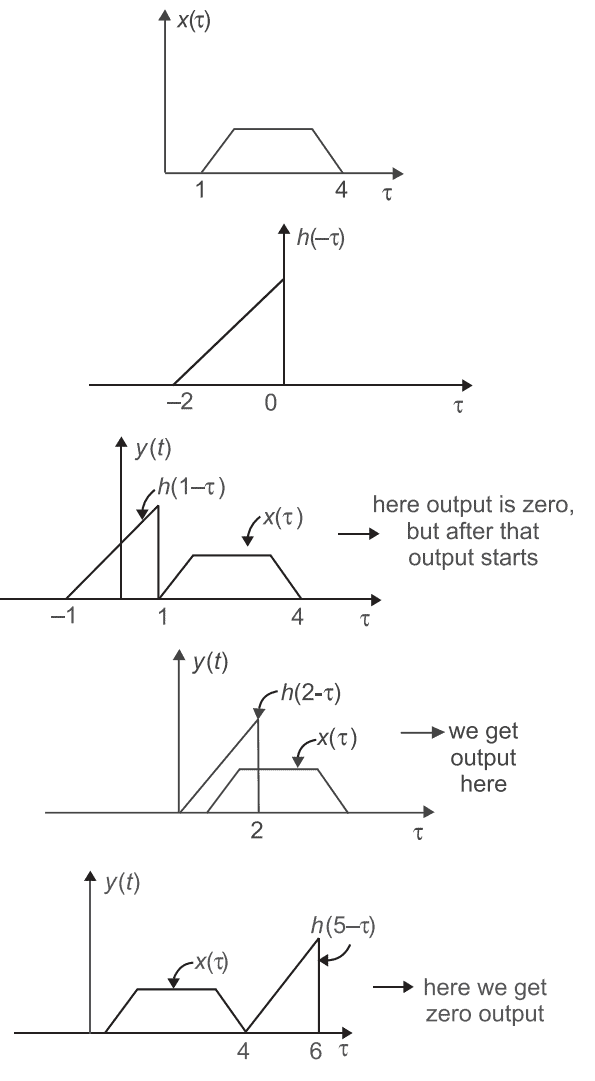
A signal f(t) = cos8πt + 0.5cos4πt is instantaneously sampled. The maximum allowable value of sampling interval Ts in sec is
Detailed Solution: Question 9
The impulse response. h[n] of a linear time invariant system is given by h[n] = u[n + 3] + u[n - 3] - 2u[n - 7], the above system is
26 docs|247 tests |