










All Exams > Electrical Engineering (EE) > 3 Months Preparation for GATE Electrical > All Questions
All questions of Introduction to Signals & Systems for Electrical Engineering (EE) Exam
What is the period of the following signal, x(t) = sin(18*pi*t + 78 deg)?- a) 1⁄9
- b) 2⁄9
- c) 1⁄3
- d) 4⁄9
Correct answer is option 'B'. Can you explain this answer?
What is the period of the following signal, x(t) = sin(18*pi*t + 78 deg)?
a)
1⁄9
b)
2⁄9
c)
1⁄3
d)
4⁄9
| | Kajal Yadav answered |
The period of a sinusoidal signal of the form x(t) = A*sin(ωt + φ) is given by T = 2π/ω, where ω is the angular frequency. In this case, ω = 18π, so the period is T = 2π/(18π) = 1/9 seconds. The phase angle (in degrees) does not affect the period. Therefore, the period of the given signal is 1/9 seconds.

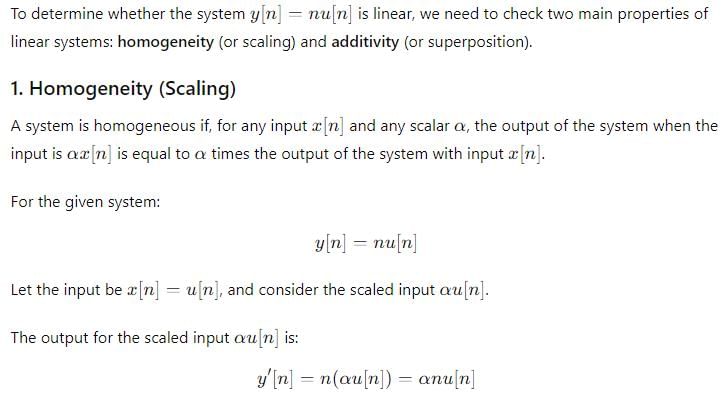
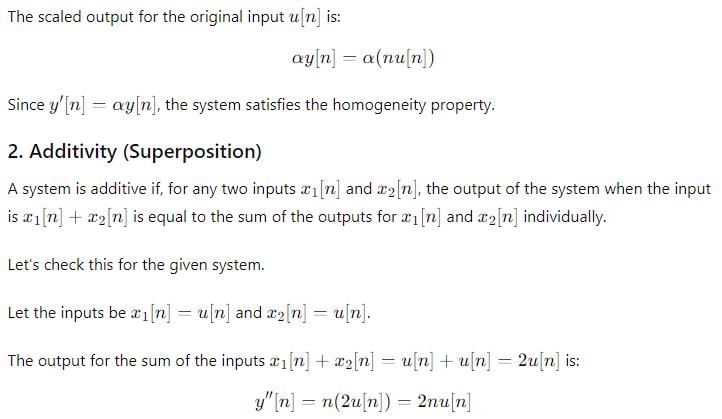
Comment on the linearity of y[n] = n*x[n].- a)Linear
- b)Only additive
- c)Not scalable
- d)Non linear
Correct answer is option 'D'. Can you explain this answer?
Comment on the linearity of y[n] = n*x[n].
a)
Linear
b)
Only additive
c)
Not scalable
d)
Non linear
| | Aditya Deshmukh answered |
The function obeys the scaling/homogeneity property, but doesn’t obey the additivity property, thus not being linear.
State whether the following system is periodic or not. y(t) = log(sin(x(t)).- a)Yes
- b)No
Correct answer is option 'B'. Can you explain this answer?
State whether the following system is periodic or not. y(t) = log(sin(x(t)).
a)
Yes
b)
No
| | Aditya Deshmukh answered |
Sin x is a periodic function, but log x is not a periodic function. Thus y is log t, where t= sin x, thus y is not periodic.
A sinusoidal signal x(t) = 2sin(100t + π/3) is passed through a square law device defined by input-output relation y(t) = x2(t), then the DC component in the signal is:- a)4
- b)2
- c)1
- d)2√3 / √2
Correct answer is option 'B'. Can you explain this answer?
A sinusoidal signal x(t) = 2sin(100t + π/3) is passed through a square law device defined by input-output relation y(t) = x2(t), then the DC component in the signal is:
a)
4
b)
2
c)
1
d)
2√3 / √2
 | Gate Funda answered |
The square law device produces an output signal that is equal to the square of the input signal. When a sinusoidal signal is passed through a square law device, the output signal will contain both the fundamental frequency and harmonics at higher frequencies. The DC component of the output signal is the average value of the output signal over time, and it is equal to the sum of the DC component of the input signal and the DC component of the harmonics.
In this case, the input signal is x(t) = 2sin(100t + π/3). The DC component of this signal is 0, since the average value of a sinusoidal signal over one period is 0. The output signal is y(t) = x^2(t) = (2sin(100t + π/3))^2 = 4cos^2(100t + π/3) = 4(1 - sin^2(100t + π/3)) = 4(1 - (2sin^2(100t + π/3)/2)) = 4(1 - sin^2(100t + π/3)/2). The DC component of this signal is 4/2 = 2.
Therefore, the correct answer is 2
For a periodic signal v(t) = 30 sin100t + 10 cos300t + 6 sin(500t + π/4), the fundamental frequency in rad/s is _____.- a)100
- b)300
- c)500
- d)1500
Correct answer is option 'A'. Can you explain this answer?
For a periodic signal v(t) = 30 sin100t + 10 cos300t + 6 sin(500t + π/4), the fundamental frequency in rad/s is _____.
a)
100
b)
300
c)
500
d)
1500
| | Luminary Institute answered |
Given, the signal
V (t) = 30 sin 100t + 10 cos 300 t + 6 sin (500t+π/4)
So, we have
ω1 = 100 rads
ω2 = 300 rads
ω3 = 500 rads
∴ The respective time periods are
So, the fundamental time period of the signal is

as, 
∴ The fundamental frequency,

The function which has its Fourier transform, Laplace transform and Z-transform unity is- a)Gaussian
- b)Impulse
- c)Sinc
- d)Pulse
Correct answer is option 'B'. Can you explain this answer?
The function which has its Fourier transform, Laplace transform and Z-transform unity is
a)
Gaussian
b)
Impulse
c)
Sinc
d)
Pulse
 | Crack Gate answered |
Concept:
The Fourier transform of a signal in the time domain is given as:
The Laplace transform F(s) of a function f(t) is defined by:
The definition of z-transform is given by,
Calculations:
Unit impulse signal:
It is defined as,

For f(t) = δ(t)
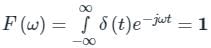
The spectrum is represented as:
The Laplace transform of unit impulse is 1 i.e. unity.

Discrete-time Laplace transform is Z- transform.

Y (t) = x (t/5) is _______- a)Compressed signal
- b)Expanded signal
- c)Time shifted signal
- d)Amplitude scaled signal by factor 1/5
Correct answer is option 'B'. Can you explain this answer?
Y (t) = x (t/5) is _______
a)
Compressed signal
b)
Expanded signal
c)
Time shifted signal
d)
Amplitude scaled signal by factor 1/5
 | Charvi Kaur answered |
Explanation:
The given equation is Y(t) = x(t/5), which implies that the output signal Y(t) is obtained by compressing the input signal x(t) by a factor of 5. This means that the signal is scaled down in time, and the time axis is compressed.
Therefore, the correct option is (B) Expanded signal.
Here are some key points to understand:
- The input signal x(t) is compressed by a factor of 5. This means that the time axis is scaled down by a factor of 5.
- The output signal Y(t) is obtained by applying this compression to the input signal.
- Since the time axis is compressed, the signal appears to expand in amplitude. This is because the same amount of signal is now squeezed into a smaller time interval.
- Therefore, the output signal Y(t) is an expanded signal, as compared to the input signal x(t).
In summary, the given equation Y(t) = x(t/5) represents an expanded signal, as the input signal is compressed in time to obtain the output signal.
The given equation is Y(t) = x(t/5), which implies that the output signal Y(t) is obtained by compressing the input signal x(t) by a factor of 5. This means that the signal is scaled down in time, and the time axis is compressed.
Therefore, the correct option is (B) Expanded signal.
Here are some key points to understand:
- The input signal x(t) is compressed by a factor of 5. This means that the time axis is scaled down by a factor of 5.
- The output signal Y(t) is obtained by applying this compression to the input signal.
- Since the time axis is compressed, the signal appears to expand in amplitude. This is because the same amount of signal is now squeezed into a smaller time interval.
- Therefore, the output signal Y(t) is an expanded signal, as compared to the input signal x(t).
In summary, the given equation Y(t) = x(t/5) represents an expanded signal, as the input signal is compressed in time to obtain the output signal.
Which of the following signals is monotonic?- a)x(t) = t3 – 2t
- b)x(t) = sin(t)
- c)x(t) = sin22(t) + cos22(t) – 2t
- d)x(t) = log(cos(t))
Correct answer is option 'C'. Can you explain this answer?
Which of the following signals is monotonic?
a)
x(t) = t3 – 2t
b)
x(t) = sin(t)
c)
x(t) = sin22(t) + cos22(t) – 2t
d)
x(t) = log(cos(t))
| | Aditya Deshmukh answered |
Reduces to 1 – 2t, which is a strictly decreasing function.
What are the steady state values of the signals, 1-exp(-t), and 1-k*exp(-k*t)?- a)1, k
- b)1, 1/k
- c)k, k
- d)1, 1
Correct answer is option 'D'. Can you explain this answer?
What are the steady state values of the signals, 1-exp(-t), and 1-k*exp(-k*t)?
a)
1, k
b)
1, 1/k
c)
k, k
d)
1, 1
| | Kalyan Patel answered |
Consider limit at t tending to infinity, we obtain 1 for both cases.
Is the function y[n] = y[n-1] + x[n] stable in nature?- a)It is stable
- b)It is unstable
- c)Both stable and unstable
- d)None of the mentioned
Correct answer is option 'A'. Can you explain this answer?
Is the function y[n] = y[n-1] + x[n] stable in nature?
a)
It is stable
b)
It is unstable
c)
Both stable and unstable
d)
None of the mentioned
| | Anoushka Kumar answered |
It is BIBO stable in nature, i.e. bounded input-bounded output stable.
What is the fundamental frequency of exp(2pi*w*j)?- a)1pi*w
- b)2pi*w
- c)w
- d)2w
Correct answer is option 'C'. Can you explain this answer?
What is the fundamental frequency of exp(2pi*w*j)?
a)
1pi*w
b)
2pi*w
c)
w
d)
2w
 | Shajahan Aboobacker answered |
Correct option is not C.
first t is missing
if t is there fundamental frequency would be 2pi*w
first t is missing
if t is there fundamental frequency would be 2pi*w
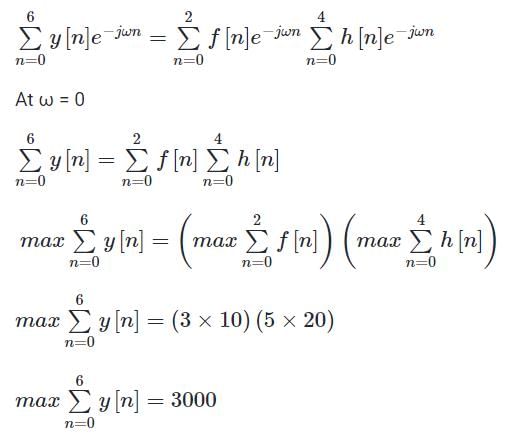
The discrete-time system y(n) is the resultant convolution of f(n) and h(n) having lengths 3 and 5 respectively. The maximum possible sample value of f(n) and h(n) are 10 and 20 respectively. Find the maximum possible value of sum of all sample value of y(n).
- a)300
- b)150
- c)1300
- d)3000
Correct answer is option 'D'. Can you explain this answer?
The discrete-time system y(n) is the resultant convolution of f(n) and h(n) having lengths 3 and 5 respectively. The maximum possible sample value of f(n) and h(n) are 10 and 20 respectively. Find the maximum possible value of sum of all sample value of y(n).
a)
300
b)
150
c)
1300
d)
3000
| | Ravi Singh answered |
If the two discrete signals are having the length ‘n’ and ‘m’ respectively then the resultant output signal has the length as n + m – 1
The convolution of signals in one domain is equivalent to the multiplication of signals in another domain.
Given y[n] = x[n] *h[n]
Operator * denotes the convolution of two signals.
The length of the output signal is y[n] = 3 + 5 – 1 = 7
Y(ejω) = F(ejω)H(ejω)
Unit Impulse function is obtained by using the limiting process on which among the following functions?- a)Triangular Function
- b)Rectangular Function
- c)Signum Function
- d)Sinc Function
Correct answer is option 'B'. Can you explain this answer?
Unit Impulse function is obtained by using the limiting process on which among the following functions?
a)
Triangular Function
b)
Rectangular Function
c)
Signum Function
d)
Sinc Function
| | Gauri Yadav answered |
Unit Impulse Function
The unit impulse function, also known as the Dirac delta function, is a mathematical function that is used to model an idealized impulse or an infinitesimally short pulse. It is often denoted as δ(t) or δ[n], where t is a continuous variable and n is a discrete variable.
Limiting Process
The unit impulse function can be obtained by using a limiting process on the rectangular function. The rectangular function, also known as the boxcar function, is a function that is equal to 1 within a certain interval and 0 outside that interval.
Explanation
To understand how the unit impulse function is obtained from the rectangular function, let's consider a rectangular function with width 2a centered at the origin:
f(t) = 1 for -a ≤ t ≤ a
f(t) = 0 otherwise
Now, let's define a sequence of rectangular functions with decreasing widths:
f1(t) = 1 for -a/2 ≤ t ≤ a/2
f1(t) = 0 otherwise
f2(t) = 1 for -a/4 ≤ t ≤ a/4
f2(t) = 0 otherwise
f3(t) = 1 for -a/8 ≤ t ≤ a/8
f3(t) = 0 otherwise
...
We can observe that as the width of the rectangular function approaches zero, its height approaches infinity in such a way that the area under the curve remains constant. This is the key idea behind the limiting process.
Now, let's define the unit impulse function as the limit of this sequence of rectangular functions as the width approaches zero:
δ(t) = lim [f1(t), f2(t), f3(t), ...]
The unit impulse function is defined such that it is zero for all values of t except at t = 0, where it is infinitely high. However, the area under the curve of the unit impulse function is equal to 1.
Conclusion
In conclusion, the unit impulse function is obtained by using the limiting process on the rectangular function. As the width of the rectangular function approaches zero, its height approaches infinity in such a way that the area under the curve remains constant. This mathematical concept allows us to model an idealized impulse or an infinitesimally short pulse, which is useful in various fields of science and engineering, including signal processing and control systems.
The unit impulse function, also known as the Dirac delta function, is a mathematical function that is used to model an idealized impulse or an infinitesimally short pulse. It is often denoted as δ(t) or δ[n], where t is a continuous variable and n is a discrete variable.
Limiting Process
The unit impulse function can be obtained by using a limiting process on the rectangular function. The rectangular function, also known as the boxcar function, is a function that is equal to 1 within a certain interval and 0 outside that interval.
Explanation
To understand how the unit impulse function is obtained from the rectangular function, let's consider a rectangular function with width 2a centered at the origin:
f(t) = 1 for -a ≤ t ≤ a
f(t) = 0 otherwise
Now, let's define a sequence of rectangular functions with decreasing widths:
f1(t) = 1 for -a/2 ≤ t ≤ a/2
f1(t) = 0 otherwise
f2(t) = 1 for -a/4 ≤ t ≤ a/4
f2(t) = 0 otherwise
f3(t) = 1 for -a/8 ≤ t ≤ a/8
f3(t) = 0 otherwise
...
We can observe that as the width of the rectangular function approaches zero, its height approaches infinity in such a way that the area under the curve remains constant. This is the key idea behind the limiting process.
Now, let's define the unit impulse function as the limit of this sequence of rectangular functions as the width approaches zero:
δ(t) = lim [f1(t), f2(t), f3(t), ...]
The unit impulse function is defined such that it is zero for all values of t except at t = 0, where it is infinitely high. However, the area under the curve of the unit impulse function is equal to 1.
Conclusion
In conclusion, the unit impulse function is obtained by using the limiting process on the rectangular function. As the width of the rectangular function approaches zero, its height approaches infinity in such a way that the area under the curve remains constant. This mathematical concept allows us to model an idealized impulse or an infinitesimally short pulse, which is useful in various fields of science and engineering, including signal processing and control systems.
The signal denoted by x(t) is known as - a)discrete time signal
- b)continuous time signal
- c)both (1) and (2)
- d)None of the above
Correct answer is option 'B'. Can you explain this answer?
The signal denoted by x(t) is known as
a)
discrete time signal
b)
continuous time signal
c)
both (1) and (2)
d)
None of the above
| | Tanya Chauhan answered |
Continuous Time Signal vs Discrete Time Signal
Continuous time signals and discrete time signals are two types of signals that are commonly used in the field of signal processing. The main difference between these two types of signals lies in the way they are defined and represented.
Continuous Time Signal:
A continuous time signal x(t) is defined for all values of time t in a continuous manner. This means that the signal is defined at every instant of time in a continuous fashion. The signal can take on any value at any point in time and can be represented by a continuous function.
Examples of continuous time signals include audio signals, video signals, and most real-world signals that are measured or observed in a continuous manner.
Discrete Time Signal:
A discrete time signal x(n) is defined only at specific points in time. The signal is represented by a sequence of values that are sampled at discrete points in time. These discrete points are usually equally spaced and are represented by an index n.
Examples of discrete time signals include digital audio signals, sampled data from sensors, and most signals that are processed by digital systems.
Explanation of the Correct Answer:
The signal denoted by x(t) is known as a continuous time signal. This is because the signal is denoted by a continuous variable "t" and is defined for all values of time in a continuous manner. The signal can take on any value at any point in time, and its representation would require a continuous function.
The other options provided in the question are not correct because:
- Option (a) states that the signal is a discrete time signal, which is not true.
- Option (c) states that the signal is both a discrete time signal and a continuous time signal, which is not correct. The signal cannot be both at the same time.
- Option (d) states that none of the above options are correct, which is also not true.
Therefore, the correct answer is option (b), which states that the signal denoted by x(t) is a continuous time signal.
Continuous time signals and discrete time signals are two types of signals that are commonly used in the field of signal processing. The main difference between these two types of signals lies in the way they are defined and represented.
Continuous Time Signal:
A continuous time signal x(t) is defined for all values of time t in a continuous manner. This means that the signal is defined at every instant of time in a continuous fashion. The signal can take on any value at any point in time and can be represented by a continuous function.
Examples of continuous time signals include audio signals, video signals, and most real-world signals that are measured or observed in a continuous manner.
Discrete Time Signal:
A discrete time signal x(n) is defined only at specific points in time. The signal is represented by a sequence of values that are sampled at discrete points in time. These discrete points are usually equally spaced and are represented by an index n.
Examples of discrete time signals include digital audio signals, sampled data from sensors, and most signals that are processed by digital systems.
Explanation of the Correct Answer:
The signal denoted by x(t) is known as a continuous time signal. This is because the signal is denoted by a continuous variable "t" and is defined for all values of time in a continuous manner. The signal can take on any value at any point in time, and its representation would require a continuous function.
The other options provided in the question are not correct because:
- Option (a) states that the signal is a discrete time signal, which is not true.
- Option (c) states that the signal is both a discrete time signal and a continuous time signal, which is not correct. The signal cannot be both at the same time.
- Option (d) states that none of the above options are correct, which is also not true.
Therefore, the correct answer is option (b), which states that the signal denoted by x(t) is a continuous time signal.
Consider a signal x(t) = 4 cos (2t/3) + 8 sin (0.5t) + 7 sin (t/3 – π/6)Calculate the fundamental period.- a)6π seconds
- b)2π seconds
- c)12π seconds
- d)π seconds
Correct answer is option 'C'. Can you explain this answer?
Consider a signal x(t) = 4 cos (2t/3) + 8 sin (0.5t) + 7 sin (t/3 – π/6)
Calculate the fundamental period.
a)
6π seconds
b)
2π seconds
c)
12π seconds
d)
π seconds
| | Ravi Singh answered |
Concept:
Continious time signal x(t) is given as,
x(t) = x1(t) + x2(t)
Then, Time period of x(t) is (N) = LCM (T1, T2,)
Time period of x1(t) is Given as:
T1 = 2π / ω01
Time period of x2(t) is Given as:
T2 = 2π / ω02
Calculation:
Given:

T1 = 2π / 2/3 = 3π
T2 = 2π / .5 = 4π
T3 = 2π / 13 = 6π
Time period = L.C.M. (T1, T2, T3)
= L.C.M. (3π, 4π, 6π)
= 12π
AM radio signal is an example for __________- a)y (t) = a x (t)
- b)y (t) = x1 (t) + x2 (t)
- c)y (t) = x1 (t) * x2 (t)
- d)y (t) = -x(t)
Correct answer is option 'C'. Can you explain this answer?
AM radio signal is an example for __________
a)
y (t) = a x (t)
b)
y (t) = x1 (t) + x2 (t)
c)
y (t) = x1 (t) * x2 (t)
d)
y (t) = -x(t)
| | Sarita Yadav answered |
AM radio signal is an example for y (t) = x1 (t) * x2 (t) where, x1 (t) consists of an audio signal plus a dc component and x2 (t) is a sinusoidal signal called carrier wave.
Which of the following is an example of amplitude scaling?- a)Electronic amplifier
- b)Electronic attenuator
- c)Both amplifier and attenuator
- d)Adder
Correct answer is option 'C'. Can you explain this answer?
Which of the following is an example of amplitude scaling?
a)
Electronic amplifier
b)
Electronic attenuator
c)
Both amplifier and attenuator
d)
Adder
| | Kabir Singhania answered |
Amplitude Scaling
Amplitude scaling refers to the process of adjusting the amplitude or strength of a signal. It is commonly used in electronic circuits to control the magnitude of a signal. There are several devices and techniques that can be employed for amplitude scaling, including electronic amplifiers, electronic attenuators, and adders.
Electronic Amplifier
An electronic amplifier is a device that increases the amplitude of a signal. It takes a weak input signal and produces a larger output signal, thereby amplifying the original signal. Amplifiers are widely used in various applications, such as audio systems, telecommunication systems, and instrumentation.
Amplifiers can be categorized into different types based on their operating characteristics, such as voltage amplifiers, current amplifiers, power amplifiers, and operational amplifiers. Each type of amplifier has its own specific purpose and application.
Electronic Attenuator
An electronic attenuator is a device that reduces the amplitude of a signal. It is used to decrease the strength of a signal without introducing significant distortion or noise. Attenuators are commonly used in communication systems, audio equipment, and test and measurement setups.
Attenuators are available in various configurations, including fixed attenuators and variable attenuators. Fixed attenuators provide a fixed level of attenuation, while variable attenuators allow for adjustable attenuation levels. Attenuators are often expressed in terms of decibels (dB), which indicate the amount of attenuation provided.
Amplitude Scaling using Amplifier and Attenuator
The correct answer to the question is option 'C', which states that both an amplifier and an attenuator are examples of amplitude scaling devices. This means that both devices can be used to adjust the amplitude of a signal, albeit in opposite directions.
An amplifier increases the amplitude of a signal, while an attenuator decreases it. Depending on the requirements of a particular application, either an amplifier or an attenuator can be used to achieve the desired amplitude scaling.
Adder
The option 'D', which suggests an adder as an example of amplitude scaling, is incorrect. An adder is a device used in digital circuits to perform addition operations, such as adding two binary numbers. It is not used for amplitude scaling purposes.
In conclusion, amplitude scaling can be achieved using both amplifiers and attenuators. Amplifiers increase the amplitude of a signal, while attenuators decrease it. These devices are widely used in electronic circuits to control and adjust the strength of a signal, depending on the specific requirements of a given application.
Amplitude scaling refers to the process of adjusting the amplitude or strength of a signal. It is commonly used in electronic circuits to control the magnitude of a signal. There are several devices and techniques that can be employed for amplitude scaling, including electronic amplifiers, electronic attenuators, and adders.
Electronic Amplifier
An electronic amplifier is a device that increases the amplitude of a signal. It takes a weak input signal and produces a larger output signal, thereby amplifying the original signal. Amplifiers are widely used in various applications, such as audio systems, telecommunication systems, and instrumentation.
Amplifiers can be categorized into different types based on their operating characteristics, such as voltage amplifiers, current amplifiers, power amplifiers, and operational amplifiers. Each type of amplifier has its own specific purpose and application.
Electronic Attenuator
An electronic attenuator is a device that reduces the amplitude of a signal. It is used to decrease the strength of a signal without introducing significant distortion or noise. Attenuators are commonly used in communication systems, audio equipment, and test and measurement setups.
Attenuators are available in various configurations, including fixed attenuators and variable attenuators. Fixed attenuators provide a fixed level of attenuation, while variable attenuators allow for adjustable attenuation levels. Attenuators are often expressed in terms of decibels (dB), which indicate the amount of attenuation provided.
Amplitude Scaling using Amplifier and Attenuator
The correct answer to the question is option 'C', which states that both an amplifier and an attenuator are examples of amplitude scaling devices. This means that both devices can be used to adjust the amplitude of a signal, albeit in opposite directions.
An amplifier increases the amplitude of a signal, while an attenuator decreases it. Depending on the requirements of a particular application, either an amplifier or an attenuator can be used to achieve the desired amplitude scaling.
Adder
The option 'D', which suggests an adder as an example of amplitude scaling, is incorrect. An adder is a device used in digital circuits to perform addition operations, such as adding two binary numbers. It is not used for amplitude scaling purposes.
In conclusion, amplitude scaling can be achieved using both amplifiers and attenuators. Amplifiers increase the amplitude of a signal, while attenuators decrease it. These devices are widely used in electronic circuits to control and adjust the strength of a signal, depending on the specific requirements of a given application.
Y(t) = x(0.5t)- a)Is time shifted signal
- b)Is compressed time signal
- c)Is amplitude scaled signal
- d)Is expanded time scale signal
Correct answer is option 'D'. Can you explain this answer?
Y(t) = x(0.5t)
a)
Is time shifted signal
b)
Is compressed time signal
c)
Is amplitude scaled signal
d)
Is expanded time scale signal
| | Sanvi Kapoor answered |
When the α value is less than one in time scaling then the signal is said to be expanded or dilated
Find the magnitude of exp(jwt). Find the boundness of sin(t) and cos(t).- a)1, [-1,2], [-1,2].
- b)0.5, [-1,1], [-1,1].
- c)1, [-1,1], [-1,2].
- d)1, [-1,1], [-1,1].
Correct answer is option 'D'. Can you explain this answer?
Find the magnitude of exp(jwt). Find the boundness of sin(t) and cos(t).
a)
1, [-1,2], [-1,2].
b)
0.5, [-1,1], [-1,1].
c)
1, [-1,1], [-1,2].
d)
1, [-1,1], [-1,1].
| | Aaditya Choudhary answered |
The sin(t)and cos(t) can be found using Euler’s rule.
We define y[n] = nx[n] – (n-1)x[n]. Now, z[n] = z[n-1] + y[n]. Is z[n] a causal system?- a)No
- b)Yes
Correct answer is option 'B'. Can you explain this answer?
We define y[n] = nx[n] – (n-1)x[n]. Now, z[n] = z[n-1] + y[n]. Is z[n] a causal system?
a)
No
b)
Yes
| | Hiral Kulkarni answered |
As the value of the function depends solely on the value of the input at a time presently and/or in the past, it is a causal system.
Consider below figure , is the given y (t) an integration of x (t)?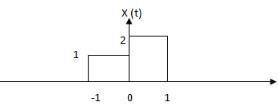
- a)Y (t) = ∫x (t).dt
- b)Y (t) = ∫x2 (t).dt
- c)Y (t) = 3* ∫x (t).dt
- d)Y (t) = 3* ∫x2 (t).dt
Correct answer is option 'A'. Can you explain this answer?
Consider below figure , is the given y (t) an integration of x (t)?
a)
Y (t) = ∫x (t).dt
b)
Y (t) = ∫x2 (t).dt
c)
Y (t) = 3* ∫x (t).dt
d)
Y (t) = 3* ∫x2 (t).dt
| | Luminary Institute answered |
The given y (t) is integral of x (t) and amplitude 3 remains constant for t > 1.
It is because of the properties of integration.
It is because of the properties of integration.
Does the system h(t) = exp([-1-2j]t) correspond to a stable system?- a)Yes
- b)No
- c)Marginally Stable
- d)None of the mentioned
Correct answer is option 'C'. Can you explain this answer?
Does the system h(t) = exp([-1-2j]t) correspond to a stable system?
a)
Yes
b)
No
c)
Marginally Stable
d)
None of the mentioned
| | Aniket Shah answered |
Stability of a System
Stability is a crucial property of a system that determines its behavior and performance. In the context of linear time-invariant (LTI) systems, stability refers to the boundedness of the system's output for bounded input signals. An LTI system is said to be stable if and only if every bounded input signal produces a bounded output signal.
There are three types of stability for LTI systems:
1. Stable: A system is stable if its output remains bounded for any bounded input.
2. Unstable: A system is unstable if its output becomes unbounded for at least one bounded input.
3. Marginally Stable: A system is marginally stable if its output remains bounded for some bounded input signals but not for all bounded input signals.
Analysis of the Given System
The given system is represented by the transfer function h(t) = exp([-1-2j]t), where exp represents the exponential function and [a+bi] represents a complex number with a real part a and an imaginary part b.
To determine the stability of this system, we need to analyze the behavior of its transfer function. In this case, the transfer function is a complex exponential function with a negative real part (-1) and a complex part (-2j).
Boundedness of the Exponential Function
The boundedness of an exponential function depends on its real part. A complex exponential function with a negative real part is always bounded. This is because the exponential term decreases exponentially as time increases.
In our case, the real part of the complex exponential function is -1, which is negative. Therefore, the exponential function exp([-1-2j]t) is bounded for any value of t.
Conclusion
Since the given system's transfer function is a bounded complex exponential function, it implies that the system's output will always remain bounded for any bounded input signal. Therefore, the system is marginally stable as it remains bounded for some bounded input signals but not for all bounded input signals.
Hence, the correct answer is option C) Marginally Stable.
Stability is a crucial property of a system that determines its behavior and performance. In the context of linear time-invariant (LTI) systems, stability refers to the boundedness of the system's output for bounded input signals. An LTI system is said to be stable if and only if every bounded input signal produces a bounded output signal.
There are three types of stability for LTI systems:
1. Stable: A system is stable if its output remains bounded for any bounded input.
2. Unstable: A system is unstable if its output becomes unbounded for at least one bounded input.
3. Marginally Stable: A system is marginally stable if its output remains bounded for some bounded input signals but not for all bounded input signals.
Analysis of the Given System
The given system is represented by the transfer function h(t) = exp([-1-2j]t), where exp represents the exponential function and [a+bi] represents a complex number with a real part a and an imaginary part b.
To determine the stability of this system, we need to analyze the behavior of its transfer function. In this case, the transfer function is a complex exponential function with a negative real part (-1) and a complex part (-2j).
Boundedness of the Exponential Function
The boundedness of an exponential function depends on its real part. A complex exponential function with a negative real part is always bounded. This is because the exponential term decreases exponentially as time increases.
In our case, the real part of the complex exponential function is -1, which is negative. Therefore, the exponential function exp([-1-2j]t) is bounded for any value of t.
Conclusion
Since the given system's transfer function is a bounded complex exponential function, it implies that the system's output will always remain bounded for any bounded input signal. Therefore, the system is marginally stable as it remains bounded for some bounded input signals but not for all bounded input signals.
Hence, the correct answer is option C) Marginally Stable.
Is the function y[2n] = x[2n] linear in nature?- a)Yes
- b)No
Correct answer is option 'A'. Can you explain this answer?
Is the function y[2n] = x[2n] linear in nature?
a)
Yes
b)
No
| | Lakshmi Desai answered |
The function obeys both additivity and homogeneity properties. Hence, the function is linear.
Is the system h(t) = exp(-jwt) stable?- a)Yes
- b)No
- c)Can’t say
- d)None of the mentioned
Correct answer is option 'C'. Can you explain this answer?
Is the system h(t) = exp(-jwt) stable?
a)
Yes
b)
No
c)
Can’t say
d)
None of the mentioned
| | Suyash Joshi answered |
If w is a complex number with Im(w) < 0, we could have an unstable situation as well. Hence, we cannot conclude [no constraints on w given].
exp(jwt) is periodic- a)for any w
- b)for any t
- c)for no w
- d)for no t
Correct answer is option 'A'. Can you explain this answer?
exp(jwt) is periodic
a)
for any w
b)
for any t
c)
for no w
d)
for no t
| | Dhruv Datta answered |
Any two instants, t and t + 2pi will be equal, hence the signal will be periodic with period 2pi.
y(t) = sin(x(t-1)) : Comment on its memory aspects.- a)Having memory
- b)Needn’t have memory
- c)Memoryless system
- d)Time invariant system
Correct answer is option 'A'. Can you explain this answer?
y(t) = sin(x(t-1)) : Comment on its memory aspects.
a)
Having memory
b)
Needn’t have memory
c)
Memoryless system
d)
Time invariant system
| | Muskaan Nair answered |
The output at any time t = A, requires knowing the input at an earlier time, t = A – 1, hence making the system require memory aspects.
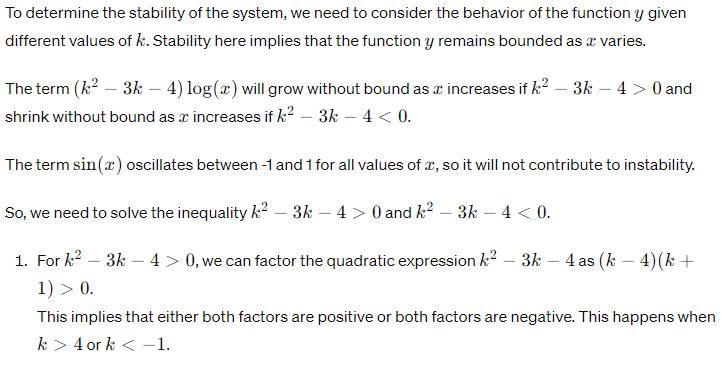
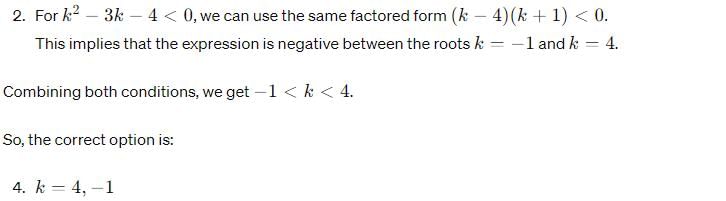
Which of the following systems is stable?- a)y(t) = log(x(t))
- b)y(t) = sin(x(t))
- c)y(t) = exp(x(t))
- d)y(t) = tx(t) + 1
Correct answer is option 'B'. Can you explain this answer?
Which of the following systems is stable?
a)
y(t) = log(x(t))
b)
y(t) = sin(x(t))
c)
y(t) = exp(x(t))
d)
y(t) = tx(t) + 1
| | Suyash Joshi answered |
Stability implies that a bounded input should give a bounded output. In a,b,d there are regions of x, for which y reaches infinity/negative infinity. Thus the sin function always stays between -1 and 1, and is hence stable.
A causal discrete time LTI system is described by:Y(n) + 5y(n-1) + 6y(n – 2) = 5x(n) – 2x(n-1)Find the impulse response h(n) of causal system.- a)17(3)n u(-n) + 12(2)n u(n)
- b)17 (-3)n u(n) – 12 (-2)n u(n)
- c)17 (2)n u(n) – 12 (3)n u(n)
- d)17 (2)n u(n-1) – 12 (3)n u(n-1)
Correct answer is option 'B'. Can you explain this answer?
A causal discrete time LTI system is described by:
Y(n) + 5y(n-1) + 6y(n – 2) = 5x(n) – 2x(n-1)
Find the impulse response h(n) of causal system.
a)
17(3)n u(-n) + 12(2)n u(n)
b)
17 (-3)n u(n) – 12 (-2)n u(n)
c)
17 (2)n u(n) – 12 (3)n u(n)
d)
17 (2)n u(n-1) – 12 (3)n u(n-1)
| | Sarita Yadav answered |
y(n) + 5y(n-1) + 6y(n-2) = 5x(n) – 2x(n-1)
Taking the z-transform
Y(z) + 5z-1 Y(z) + 6z-2 Y(z) = 5X(z) - 2z-1X(z)
y(z) [1 + 5z-1 + 6z-2] = X(z) [5 – 2z-1]

Taking inverse Z-transform,
h(n) = 17(-3)n u(n) – 12(-2)n u(n)
What is exp(ja) equal to, where j is the square root of unity?- a)cos ja + jsin a
- b)sin a + jcos a
- c)cos j + a sin j
- d)cos a + jsin a
Correct answer is option 'D'. Can you explain this answer?
What is exp(ja) equal to, where j is the square root of unity?
a)
cos ja + jsin a
b)
sin a + jcos a
c)
cos j + a sin j
d)
cos a + jsin a
| | Ishan Saini answered |
This is the corollary of DeMoivre/Euler’s Theorem.
The convolution of a discrete time system with a delta function gives- a)the square of the system
- b)the system itself
- c)the derivative of the system
- d)the integral of the system
Correct answer is option 'B'. Can you explain this answer?
The convolution of a discrete time system with a delta function gives
a)
the square of the system
b)
the system itself
c)
the derivative of the system
d)
the integral of the system
| | Anirban Chawla answered |
The integral reduces to the the integral calculated at a single point, determined by the centre of the delta function.
What is the rule h*(x+y) = (y+x)*h called?- a)Commutativity rule
- b)Associativity rule
- c)Distributive rule
- d)Transitive rule
Correct answer is option 'A'. Can you explain this answer?
What is the rule h*(x+y) = (y+x)*h called?
a)
Commutativity rule
b)
Associativity rule
c)
Distributive rule
d)
Transitive rule
| | Prasad Verma answered |
By definition, the commutative rule h*x=x*h.
In which of the following useful signals, is the bilateral Laplace Transform different from the unilateral Laplace Transform?- a)d(t)
- b)s(t)
- c)u(t)
- d)all of the mentioned
Correct answer is option 'C'. Can you explain this answer?
In which of the following useful signals, is the bilateral Laplace Transform different from the unilateral Laplace Transform?
a)
d(t)
b)
s(t)
c)
u(t)
d)
all of the mentioned
| | Vaibhav Joshi answered |
The bilateral LT is different from the aspect that the integral is applied for the entire time axis, but the unilateral LT is applied only for the positive time axis. Hence, the u(t) [unit step function] differs in that aspect and hence can be used to differentiate the same.
Total energy possessed by a signal exp(jwt) is?- a)2pi/w
- b)pi/w
- c)pi/2w
- d)2pi/3w
Correct answer is option 'A'. Can you explain this answer?
Total energy possessed by a signal exp(jwt) is?
a)
2pi/w
b)
pi/w
c)
pi/2w
d)
2pi/3w
| | Sanaya Basu answered |
Energy possessed by a periodic signal is the integral of the square of the magnitude of the signal over a time period.
A control system represent by differential equation  where r(t) is the input and c(t) is output. The system is excited with input of unit the step function. The response is similar to the waveform
where r(t) is the input and c(t) is output. The system is excited with input of unit the step function. The response is similar to the waveform- a)
- b)
- c)
- d)
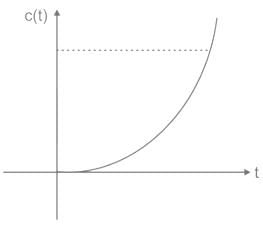
Correct answer is option 'D'. Can you explain this answer?
A control system represent by differential equation where r(t) is the input and c(t) is output. The system is excited with input of unit the step function. The response is similar to the waveform
where r(t) is the input and c(t) is output. The system is excited with input of unit the step function. The response is similar to the waveforma)
b)
c)
d)
 | EduRev GATE answered |
Given system equation
Taking Laplace transform
16s2c(s) – 8s c(s) + 1c(s) = R(s)
Transfer function
Since the poles are positive real, the system is unstable and the output tends towards x.
∴ Option 4 is the suitable response.
Transfer function
Since the poles are positive real, the system is unstable and the output tends towards x.
∴ Option 4 is the suitable response.
In the super set of signal processing operations for linear time-invariant (LTI) systems, the subset of convolution-based transformations includes the effect of time-scaling the input. Which property best describes how time scaling an input affects the convolution output?- a)The output’s time scale and amplitude are transformed relative to the input’s scaling
- b)The output is linearly transformed without altering its time scale
- c)The output’s time scale mirrors the input’s scaling with no amplitude change
- d)The output is independent of the input’s time-scale transformation
Correct answer is option 'A'. Can you explain this answer?
In the super set of signal processing operations for linear time-invariant (LTI) systems, the subset of convolution-based transformations includes the effect of time-scaling the input. Which property best describes how time scaling an input affects the convolution output?
a)
The output’s time scale and amplitude are transformed relative to the input’s scaling
b)
The output is linearly transformed without altering its time scale
c)
The output’s time scale mirrors the input’s scaling with no amplitude change
d)
The output is independent of the input’s time-scale transformation
 | Engineers Adda answered |
The effect of time-scaling in a linear time-invariant (LTI) system can be understood as follows:
- Time-scaling the input signal will alter the time scale of the output signal.
- The amplitude of the output is also transformed in relation to the input's scaling.
- This means both the time and amplitude of the output depend on how the input is scaled.
 and
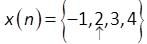
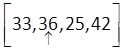
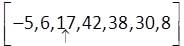
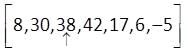
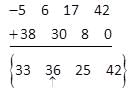
and 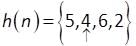 Find y(n) = x (n) ⨂ h(n), where ⨂ denotes circular convolution.
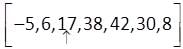
Find y(n) = x (n) ⨂ h(n), where ⨂ denotes circular convolution.- a)
- b)
- c)
- d)
Correct answer is option 'B'. Can you explain this answer?
and Find y(n) = x (n) ⨂ h(n), where ⨂ denotes circular convolution.
a)
b)
c)
d)
| | Sarita Yadav answered |

⇒ {—5, 6, 17, 42, | 38, 30, 8}
What is the following expression equal to: h*(d+bd), d(t) is the delta function- a)h + d
- b)b + d
- c)d
- d)h + b
Correct answer is option 'C'. Can you explain this answer?
What is the following expression equal to: h*(d+bd), d(t) is the delta function
a)
h + d
b)
b + d
c)
d
d)
h + b
| | Niharika Basu answered |
Apply commutative and associative rules and the convolution formula for a delta function
Is the system y(t) = Rx(t), where R is a arbitrary constant, a memoryless system?- a)Yes
- b)No
Correct answer is option 'B'. Can you explain this answer?
Is the system y(t) = Rx(t), where R is a arbitrary constant, a memoryless system?
a)
Yes
b)
No
 | Baishali Bajaj answered |
The answer is a.
The output of the system depends on the input of the system at the same time instant. Hence, the system has to be memoryless.
Let f(t) be a continuous-time signal and let F(ω) be its Fourier Transform defined by Define g(t) by
Define g(t) by What is the relationship between f(t) and g(t)?
What is the relationship between f(t) and g(t)?- a)g(t) would always be proportional to f(t)
- b)g(t) would be proportional to f(t) if f(t) is an even function
- c)g(t) would be proportional to f(t) only if f(t) is a sinusoidal function
- d)g(t) would never be proportional to f(t)
Correct answer is option 'B'. Can you explain this answer?
Let f(t) be a continuous-time signal and let F(ω) be its Fourier Transform defined by
Define g(t) by
What is the relationship between f(t) and g(t)?
a)
g(t) would always be proportional to f(t)
b)
g(t) would be proportional to f(t) if f(t) is an even function
c)
g(t) would be proportional to f(t) only if f(t) is a sinusoidal function
d)
g(t) would never be proportional to f(t)
| | Luminary Institute answered |
Given the Fourier transform pair,
The Inverse Fourier transform of F (ω) is given as
Replacing t by ‘ –t ‘ and ω by u in the above expression, we have,
If f (t) is even, then f (-t) = f (t)
∴ g (t) = 2π f (t)
⇒ g (t) will be proportional to f (t), if f (t) is an even function.
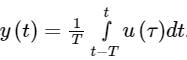 . If the input u is a sinusoidal signal of frequency
. If the input u is a sinusoidal signal of frequency  , then in steady state, the output will lag u (in degree) by
, then in steady state, the output will lag u (in degree) by
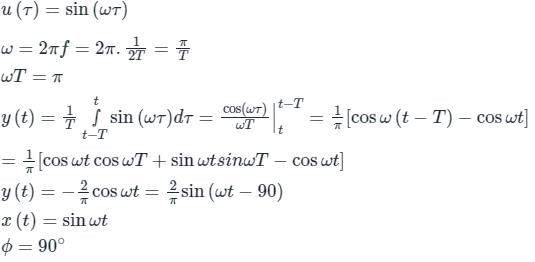
Consider the following system ‘S’ where x(n) is the input and y(n) is the output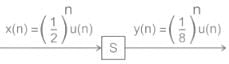
- a)The system s is linear, time invariant, stable.
- b)The system s is non-linear, time variant, unstable.
- c)The system s is non-linear, time invariant, stable.
- d)The system s is non-linear, time variant, stable.
Correct answer is option 'C'. Can you explain this answer?
Consider the following system ‘S’ where x(n) is the input and y(n) is the output
a)
The system s is linear, time invariant, stable.
b)
The system s is non-linear, time variant, unstable.
c)
The system s is non-linear, time invariant, stable.
d)
The system s is non-linear, time variant, stable.
 | Cstoppers Instructors answered |
Here the input is bounded and the output is also bounded.
Hence the system is stable.
The system is non-linear as it follows y(n) = x3(n).
The system is time-invariant as no operations are made on n.
Let P be linearity, Q be time invariance, R be causality and S be stability. In question discrete time input x[n] and output y[n] relationship has been given. In the option properties of system has been given. Choose the option which match the properties for system.
Q. y[ n] = rect ( x[ n])- a)P, Q, R
- b)Q, R, S
- c)R, S, P
- d)S , P, Q
Correct answer is option 'B'. Can you explain this answer?
Let P be linearity, Q be time invariance, R be causality and S be stability. In question discrete time input x[n] and output y[n] relationship has been given. In the option properties of system has been given. Choose the option which match the properties for system.
Q. y[ n] = rect ( x[ n])
Q. y[ n] = rect ( x[ n])
a)
P, Q, R
b)
Q, R, S
c)
R, S, P
d)
S , P, Q
| | Kajal Mukherjee answered |

 (Not Homogeneous not linear)
(Not Homogeneous not linear)
 (Time Invariant) At any discrete time n = no , the response depends only on the excitation at that discrete time.
(Time Invariant) At any discrete time n = no , the response depends only on the excitation at that discrete time.(Causal) No matter what values the excitation may have the response can only have the values zero or one.
For a bounded function, is the integral of the odd function from -infinity to +infinity defined and finite?- a)Yes
- b)Never
- c)Not always
- d)None of the mentioned
Correct answer is option 'A'. Can you explain this answer?
For a bounded function, is the integral of the odd function from -infinity to +infinity defined and finite?
a)
Yes
b)
Never
c)
Not always
d)
None of the mentioned
| | Srestha Gupta answered |
The odd function will have zero area over all real time space.
Evaluate the following function in terms of t: {integral from 0 to t}{Integral from -inf to inf}d(t)- a) 1⁄t
- b)1⁄t2
- c)t
- d)t2
Correct answer is option 'C'. Can you explain this answer?
Evaluate the following function in terms of t: {integral from 0 to t}{Integral from -inf to inf}d(t)
a)
1⁄t
b)
1⁄t2
c)
t
d)
t2
| | Aashna Dey answered |
The first integral is 1, and the overall integral evaluates to t.
We define y[n] = nx[n] – (n-1)x[n]. Now, z[n] = z[n-1] + y[n], is z[n] stable?- a)Yes
- b) No
Correct answer is option 'A'. Can you explain this answer?
We define y[n] = nx[n] – (n-1)x[n]. Now, z[n] = z[n-1] + y[n], is z[n] stable?
a)
Yes
b)
No
| | Aaditya Choudhary answered |
As we take the sum of y[n], terms cancel out and deem z[n] to be BIBO stable.
Which of the component performs integration operation?- a)Resistor
- b)Diode
- c)Capacitor
- d)Inductor
Correct answer is option 'C'. Can you explain this answer?
Which of the component performs integration operation?
a)
Resistor
b)
Diode
c)
Capacitor
d)
Inductor
| | Ravi Singh answered |
Capacitor performs integration. V (t) developed across capacitor is given by
v (t) = (1/C)* ∫t-∞ i (∂).d∂, I (t) is the current flowing through a capacitor of capacitance C.
v (t) = (1/C)* ∫t-∞ i (∂).d∂, I (t) is the current flowing through a capacitor of capacitance C.
Discrete-time signals are ________- a)Continuous in amplitude and continuous in time
- b)Continuous in amplitude and discrete in time
- c)Discrete in amplitude and discrete in time
- d)Discrete in amplitude and continuous in time
Correct answer is option 'B'. Can you explain this answer?
Discrete-time signals are ________
a)
Continuous in amplitude and continuous in time
b)
Continuous in amplitude and discrete in time
c)
Discrete in amplitude and discrete in time
d)
Discrete in amplitude and continuous in time
| | Ananya Kapoor answered |
Discrete-time signals are Continuous in amplitude and discrete in time
Definition of Discrete-time Signals:
A discrete-time signal is a sequence of values that is defined only at specific points in time. The values of a discrete-time signal are usually represented as amplitudes at equally spaced time intervals. These time intervals are discrete and separated by a fixed duration.
Explanation:
To understand why discrete-time signals are continuous in amplitude and discrete in time, let's break down the characteristics of these signals.
Continuous in amplitude:
- Amplitude refers to the magnitude or intensity of the signal.
- In discrete-time signals, the amplitude is continuous, meaning it can take on any value within a certain range.
- For example, if we have a discrete-time signal representing the temperature of a room, the amplitude can be any real number within the range of possible temperatures.
Discrete in time:
- Time refers to the instances or points at which the signal is defined.
- In discrete-time signals, the time is discrete, meaning it is defined only at specific points or intervals.
- These intervals are equally spaced and separated by a fixed duration.
- For example, if we have a discrete-time signal representing the voltage of an electrical circuit, the time instances could be measured every second, and the signal would be defined only at those specific time points.
Illustration:
Let's consider an example to further illustrate this concept. Suppose we have a discrete-time signal representing the daily temperature readings at noon for a week. The signal values would be the temperatures recorded at noon each day, and the time instances would be the days of the week.
- The amplitude of the signal would represent the temperature values, which can take on any real number within the range of possible temperatures.
- The time instances would be discrete and separated by a fixed duration of one day.
Conclusion:
In summary, discrete-time signals are continuous in amplitude because they can take on any value within a certain range. However, they are discrete in time because they are defined only at specific points or intervals, which are equally spaced and separated by a fixed duration.
Definition of Discrete-time Signals:
A discrete-time signal is a sequence of values that is defined only at specific points in time. The values of a discrete-time signal are usually represented as amplitudes at equally spaced time intervals. These time intervals are discrete and separated by a fixed duration.
Explanation:
To understand why discrete-time signals are continuous in amplitude and discrete in time, let's break down the characteristics of these signals.
Continuous in amplitude:
- Amplitude refers to the magnitude or intensity of the signal.
- In discrete-time signals, the amplitude is continuous, meaning it can take on any value within a certain range.
- For example, if we have a discrete-time signal representing the temperature of a room, the amplitude can be any real number within the range of possible temperatures.
Discrete in time:
- Time refers to the instances or points at which the signal is defined.
- In discrete-time signals, the time is discrete, meaning it is defined only at specific points or intervals.
- These intervals are equally spaced and separated by a fixed duration.
- For example, if we have a discrete-time signal representing the voltage of an electrical circuit, the time instances could be measured every second, and the signal would be defined only at those specific time points.
Illustration:
Let's consider an example to further illustrate this concept. Suppose we have a discrete-time signal representing the daily temperature readings at noon for a week. The signal values would be the temperatures recorded at noon each day, and the time instances would be the days of the week.
- The amplitude of the signal would represent the temperature values, which can take on any real number within the range of possible temperatures.
- The time instances would be discrete and separated by a fixed duration of one day.
Conclusion:
In summary, discrete-time signals are continuous in amplitude because they can take on any value within a certain range. However, they are discrete in time because they are defined only at specific points or intervals, which are equally spaced and separated by a fixed duration.
For a double sided function, which is odd, what will be the integral of the function from -infinity to +infinity equal to?- a)Non-zero Finite
- b)Zero
- c)Infinite
- d)None of the mentioned
Correct answer is option 'B'. Can you explain this answer?
For a double sided function, which is odd, what will be the integral of the function from -infinity to +infinity equal to?
a)
Non-zero Finite
b)
Zero
c)
Infinite
d)
None of the mentioned
| | Raghav Nambiar answered |
For an odd function, f(-x) = -f(x), thus the integrals will cancel each other, giving zero.
Chapter doubts & questions for Introduction to Signals & Systems - 3 Months Preparation for GATE Electrical 2026 is part of Electrical Engineering (EE) exam preparation. The chapters have been prepared according to the Electrical Engineering (EE) exam syllabus. The Chapter doubts & questions, notes, tests & MCQs are made for Electrical Engineering (EE) 2026 Exam. Find important definitions, questions, notes, meanings, examples, exercises, MCQs and online tests here.
Chapter doubts & questions of Introduction to Signals & Systems - 3 Months Preparation for GATE Electrical in English & Hindi are available as part of Electrical Engineering (EE) exam. Download more important topics, notes, lectures and mock test series for Electrical Engineering (EE) Exam by signing up for free.
3 Months Preparation for GATE Electrical676 videos|1399 docs|882 tests |