










All Exams > Electrical Engineering (EE) > 3 Months Preparation for GATE Electrical > All Questions
All questions of Introduction to Digital Control for Electrical Engineering (EE) Exam
When two honest coins are simultaneously tossed, the probability of two heads on any given trial is:- a)1
- b)3/4
- c)1/2
- d)¼
Correct answer is option 'D'. Can you explain this answer?
When two honest coins are simultaneously tossed, the probability of two heads on any given trial is:
a)
1
b)
3/4
c)
1/2
d)
¼
| | Zoya Sharma answered |
Explanation: Total outcomes =4
Favorable outcomes =1
Hence probability =1/4.
Favorable outcomes =1
Hence probability =1/4.

The system having input x (n) related to output y(n) as y (n) = log |x (n)| is:- a)Nonlinear, causal, stable
- b)Linear, noncausal, stable
- c)Nonlinear, causal, not stable
- d)Linear, noncausal, not stable
Correct answer is option 'A'. Can you explain this answer?
The system having input x (n) related to output y(n) as y (n) = log |x (n)| is:
a)
Nonlinear, causal, stable
b)
Linear, noncausal, stable
c)
Nonlinear, causal, not stable
d)
Linear, noncausal, not stable
| | Snehal Rane answered |
Explanation: As y (n) is the function of x (n) hence it is nonlinear but it is bounded and also depends upon past and present values therefore it is stable and causal respectively.
Sampling can be done by:- a)Impulse train sampling
- b)Natural sampling
- c)Flat-top sampling
- d)All of the mentioned
Correct answer is option 'D'. Can you explain this answer?
Sampling can be done by:
a)
Impulse train sampling
b)
Natural sampling
c)
Flat-top sampling
d)
All of the mentioned
| | Kajal Yadav answered |
Explanation: Sampling is the process in which the continuous systems are sampled by the application of the zero order hold and can be done by all the three methods.
Feedback always increases the gain?- a)True
- b)False
Correct answer is option 'B'. Can you explain this answer?
Feedback always increases the gain?
a)
True
b)
False
| | Gargi Basak answered |
Explanation: It cannot always increase gain it can also reduce the gain as gain of Open loop control system is more as compared to it.
The system characterized by the equation y(t) = ax(t) + b is- a)Linear for any value of b
- b)Linear if b > 0
- c)Linear if b < 0
- d)Non-linear
Correct answer is option 'D'. Can you explain this answer?
The system characterized by the equation y(t) = ax(t) + b is
a)
Linear for any value of b
b)
Linear if b > 0
c)
Linear if b < 0
d)
Non-linear
| | Divya Singh answered |
Explanation: The system is non-linear because x(t) = 0 does not lead to y (t) = 0, which is a violation of the principle of homogeneity.
Transfer function of the system is defined as the ratio of Laplace output to Laplace input considering initial conditions________- a)1
- b)2
- c)0
- d)infinite
Correct answer is option 'C'. Can you explain this answer?
Transfer function of the system is defined as the ratio of Laplace output to Laplace input considering initial conditions________
a)
1
b)
2
c)
0
d)
infinite
| | Prisha Sen answered |
Explanation: By definition transfer function is the ratio of the laplace output to the input but the initial conditions mainly the stored energy is zero.
The region of convergence of the z-transform of a unit step function is:- a)|z|>1
- b)|z|<1
- c)(Real part of z)>0
- d)(Real part of z)<0
Correct answer is option 'A'. Can you explain this answer?
The region of convergence of the z-transform of a unit step function is:
a)
|z|>1
b)
|z|<1
c)
(Real part of z)>0
d)
(Real part of z)<0
| | Muskaan Nair answered |
Explanation: h[n] =u[n] Hence, Region of Convergence is the region for which the values of the roots in z transform are lying in the function and is the range of values of z for which |z|>1.
Which of the following is not the feature of modern control system?- a)Quick response
- b)Accuracy
- c)Correct power level
- d)No oscillation
Correct answer is option 'D'. Can you explain this answer?
Which of the following is not the feature of modern control system?
a)
Quick response
b)
Accuracy
c)
Correct power level
d)
No oscillation
 | Kaavya Sengupta answered |
For a good control system the speed of response and stability must be high and for the slow and sluggish response is not used and undesirable.
A control system whose step response is -0.5(1+e-2t) is cascaded to another control block whose impulse response is e-t. What is the transfer function of the cascaded combination? - a)1/(s+2)(s+1)
- b)1/(s+1)s
- c)1/(s+3)
- d)0.5/(s+1)(s+2)
Correct answer is option 'A'. Can you explain this answer?
A control system whose step response is -0.5(1+e-2t) is cascaded to another control block whose impulse response is e-t. What is the transfer function of the cascaded combination?
a)
1/(s+2)(s+1)
b)
1/(s+1)s
c)
1/(s+3)
d)
0.5/(s+1)(s+2)
| | Sanaya Basu answered |
Solution: Laplace transform is the transformation that transforms the time domain into frequency domain and of both the cascaded systems are 1/(s+1)(s+2).
A tachometer is added to servomechanism because:- a)It is easily adjustable
- b)It can adjust damping
- c)It reduces steady state error
- d)It converts velocity of the shaft to a proportional Dc voltage
Correct answer is option 'B'. Can you explain this answer?
A tachometer is added to servomechanism because:
a)
It is easily adjustable
b)
It can adjust damping
c)
It reduces steady state error
d)
It converts velocity of the shaft to a proportional Dc voltage
| | Shail Nambiar answered |
Explanation: A tachometer is a device to control the speed and adjust damping and it is used in servomechanism to adjust damping and mainly is used in AC servomotors.
For the successful reconstruction of signals :- a)Sampling frequency must be equal to the message signal
- b)Sampling frequency must be greater to the message signal
- c)Sampling frequency must be less to the message signal
- d)Sampling frequency must be greater than or equal to the message signal
Correct answer is option 'D'. Can you explain this answer?
For the successful reconstruction of signals :
a)
Sampling frequency must be equal to the message signal
b)
Sampling frequency must be greater to the message signal
c)
Sampling frequency must be less to the message signal
d)
Sampling frequency must be greater than or equal to the message signal
| | Divya Singh answered |
Explanation: Reconstruction of signals refers to the conversion of the discrete time signals into continuous tiem signals and for the succesful reconstruction of signals sampling frequency must be greater than or equal to the message signal but ideally it is always preferred to be greater.
First column elements of the Routh’s tabulation are 3, 5, -3/4, ½, 2. It means that there are:- a)Is one root in the left half of s-plane
- b)Are two roots in the left half of s-plane
- c)Are two roots in the right half of the s-plane
- d)Is one root in the right half of s-plane
Correct answer is option 'C'. Can you explain this answer?
First column elements of the Routh’s tabulation are 3, 5, -3/4, ½, 2. It means that there are:
a)
Is one root in the left half of s-plane
b)
Are two roots in the left half of s-plane
c)
Are two roots in the right half of the s-plane
d)
Is one root in the right half of s-plane
| | Sanskriti Bajaj answered |
Explanation: Routh hurwitz criteria is used to find the stability of the system and this is determined by the number of roots in which the number of roots is equal to the number of sign changes.
If the region of convergence of x1[n]+x2[n] is 1/>|z|<2/3, the region of convergence of x1[n]-x2[n] includes:- a)1/3>|z|<3
- b)2/3>|z|<3
- c)3/2>|z|<3
- d)1/3>|z|<2/3
Correct answer is option 'D'. Can you explain this answer?
If the region of convergence of x1[n]+x2[n] is 1/>|z|<2/3, the region of convergence of x1[n]-x2[n] includes:
a)
1/3>|z|<3
b)
2/3>|z|<3
c)
3/2>|z|<3
d)
1/3>|z|<2/3
| | Prerna Tiwari answered |
Explanation: Region of Convergence is the region for which the values of the roots in z transform are lying in the function and ROC remains the same for addition and subtraction in z-domain.
The use of sampled data control system are:- a)For using analog components as the part of the control loop
- b)For time division of control components
- c)Whenever a transmission channel forms a part of closed loop
- d)None of the mentioned
Correct answer is option 'C'. Can you explain this answer?
The use of sampled data control system are:
a)
For using analog components as the part of the control loop
b)
For time division of control components
c)
Whenever a transmission channel forms a part of closed loop
d)
None of the mentioned
| | Malavika Nair answered |
Understanding Sampled Data Control Systems
Sampled data control systems are essential in modern control theory and engineering. They are designed to handle systems where data is collected or transmitted at discrete intervals. The correct answer to the question about the use of sampled data control systems being option 'C' can be elaborated as follows:
Closed Loop Systems
- Sampled data control systems are particularly useful when a transmission channel is involved in the closed-loop system.
- In a closed-loop system, feedback from the output is necessary to adjust the input for achieving the desired performance.
- When the output is sampled at intervals, the controller can process this information to modify the inputs, ensuring the system behaves as intended.
Importance of Sampling
- Sampling allows for effective utilization of digital communication channels, which are often more efficient and reliable than continuous analog signals.
- It enables the implementation of digital controllers, which can process data more robustly and offer greater flexibility in system design.
Applications
- Common applications include digital signal processing, robotics, and automated control systems where real-time feedback is crucial.
- In such systems, the discrete nature of sampling aligns well with the digital processing capabilities of modern hardware.
Conclusion
- Therefore, option 'C' is correct as sampled data control systems are critical when a transmission channel is part of a closed-loop setup, facilitating effective feedback and control in various engineering applications.
Sampled data control systems are essential in modern control theory and engineering. They are designed to handle systems where data is collected or transmitted at discrete intervals. The correct answer to the question about the use of sampled data control systems being option 'C' can be elaborated as follows:
Closed Loop Systems
- Sampled data control systems are particularly useful when a transmission channel is involved in the closed-loop system.
- In a closed-loop system, feedback from the output is necessary to adjust the input for achieving the desired performance.
- When the output is sampled at intervals, the controller can process this information to modify the inputs, ensuring the system behaves as intended.
Importance of Sampling
- Sampling allows for effective utilization of digital communication channels, which are often more efficient and reliable than continuous analog signals.
- It enables the implementation of digital controllers, which can process data more robustly and offer greater flexibility in system design.
Applications
- Common applications include digital signal processing, robotics, and automated control systems where real-time feedback is crucial.
- In such systems, the discrete nature of sampling aligns well with the digital processing capabilities of modern hardware.
Conclusion
- Therefore, option 'C' is correct as sampled data control systems are critical when a transmission channel is part of a closed-loop setup, facilitating effective feedback and control in various engineering applications.
Assertion (A): DC servomotors are more commonly used in armature controlled mode than field controlled mode.
Reason (R): Armature controlled Dc motors have higher starting torque than fiels controlled motors.- a)Both A and R are true and R is the correct explanation of A
- b)Both A and R are true but R is not correct explanation of A
- c)A is true but R is false
- d)A is false but R is true
Correct answer is option 'A'. Can you explain this answer?
Assertion (A): DC servomotors are more commonly used in armature controlled mode than field controlled mode.
Reason (R): Armature controlled Dc motors have higher starting torque than fiels controlled motors.
Reason (R): Armature controlled Dc motors have higher starting torque than fiels controlled motors.
a)
Both A and R are true and R is the correct explanation of A
b)
Both A and R are true but R is not correct explanation of A
c)
A is true but R is false
d)
A is false but R is true
| | Raghav Majumdar answered |
Explanation: To get higher speed in field controlled dc motor, field current is decreased with decrease in torque.
Consider the following statements:
Routh-Hurwitz criterion gives:
1. Absolute stability
2. The number of roots lying on the right half of the s-plane
3. The gain margin and the phase margin- a)1,2 and3
- b)1 and 2
- c)2 and 3
- d)1 and 3
Correct answer is option 'B'. Can you explain this answer?
Consider the following statements:
Routh-Hurwitz criterion gives:
1. Absolute stability
2. The number of roots lying on the right half of the s-plane
3. The gain margin and the phase margin
Routh-Hurwitz criterion gives:
1. Absolute stability
2. The number of roots lying on the right half of the s-plane
3. The gain margin and the phase margin
a)
1,2 and3
b)
1 and 2
c)
2 and 3
d)
1 and 3
| | Gayatri Menon answered |
Explanation: Routh-Hurwitz criterion gives absolute stability and number of roots lying on the right half of the s-plane.
Z and Laplace transform are related by:- a)s = ln z
- b)s =ln z/T
- c)s =z
- d)s= T/ln z
Correct answer is option 'B'. Can you explain this answer?
Z and Laplace transform are related by:
a)
s = ln z
b)
s =ln z/T
c)
s =z
d)
s= T/ln z
| | Sravya Khanna answered |
Explanation: z = est
s =ln z/T.
s =ln z/T.
The overall transfer function from block diagram reduction for cascaded blocks is :- a)Sum of individual gain
- b)Product of individual gain
- c)Difference of individual gain
- d)Division of individual gain
Correct answer is option 'B'. Can you explain this answer?
The overall transfer function from block diagram reduction for cascaded blocks is :
a)
Sum of individual gain
b)
Product of individual gain
c)
Difference of individual gain
d)
Division of individual gain
| | Sneha Bose answered |
Explanation: Gain of block get multiplied when they are cascaded where cascaded means that the blocks are in series combination with no summer in between.
Hence, the correct answer is Option B
You can attempt more such questions by going through the link:

A signal represented by x(t) =5cos 400πt is sampled at a rate 300 samples/sec. The resulting samples are passed through an ideal low pass filter of cut-off frequency 150 Hz. Which of the following will be contained in the output of the LPF?- a)100 Hz
- b)100 Hz, 150 Hz
- c)50 Hz, 100 Hz
- d)50 Hz, 100 Hz, 150 Hz
Correct answer is option 'A'. Can you explain this answer?
A signal represented by x(t) =5cos 400πt is sampled at a rate 300 samples/sec. The resulting samples are passed through an ideal low pass filter of cut-off frequency 150 Hz. Which of the following will be contained in the output of the LPF?
a)
100 Hz
b)
100 Hz, 150 Hz
c)
50 Hz, 100 Hz
d)
50 Hz, 100 Hz, 150 Hz
| | Saumya Sen answered |
Explanation: x (t) =5cos400πt
fm =200 Hz
The output of the LPF will contain frequencies which are less than fc =150 Hz.
So, fs-fm =300-200 =100 Hz is the only component present in the output of LPF.
fm =200 Hz
The output of the LPF will contain frequencies which are less than fc =150 Hz.
So, fs-fm =300-200 =100 Hz is the only component present in the output of LPF.
Statement (I): Aliasing occurs when the sampling frequency is less than twice the maximum frequency in the signal.
Statement (II): Aliasing is a reversible process.- a)Both statement (I) and Statement (II) are individually true and Statement (II) is the correct explanation of Statement (I).
- b)Both Statement (I) and Statement (II) are individually true but Statement (II) is not correct explanation of Statement (I)
- c)Statement (I) is true but Statement (II) is false
- d)Statement (I) is False but Statement (II) is true
Correct answer is option 'C'. Can you explain this answer?
Statement (I): Aliasing occurs when the sampling frequency is less than twice the maximum frequency in the signal.
Statement (II): Aliasing is a reversible process.
Statement (II): Aliasing is a reversible process.
a)
Both statement (I) and Statement (II) are individually true and Statement (II) is the correct explanation of Statement (I).
b)
Both Statement (I) and Statement (II) are individually true but Statement (II) is not correct explanation of Statement (I)
c)
Statement (I) is true but Statement (II) is false
d)
Statement (I) is False but Statement (II) is true
| | Saumya Sen answered |
Explanation: Aliasing is an irreversible process. Once aliasing has occurred then signal can-not be recovered back.
The given characteristic equation s4+s3+2s2+2s+3=0 has: - a)Zero root in the s-plane
- b)One root in the RHS of s-plane
- c)Two root in the RHS of s-plane
- d)Three root in the RHS of s-plane
Correct answer is option 'C'. Can you explain this answer?
The given characteristic equation s4+s3+2s2+2s+3=0 has:
a)
Zero root in the s-plane
b)
One root in the RHS of s-plane
c)
Two root in the RHS of s-plane
d)
Three root in the RHS of s-plane
| | Jaya Dasgupta answered |
Explanation: The stability analysis is done using Routh-Hurwitz criterion and hence the number of roots on the right is calculated.
The band width, in a feedback amplifier.- a)Remains unaffected
- b)Decreases by the same amount as the gain increase
- c)Increases by the same amount as the gain decrease
- d)Decreases by the same amount as the gain decrease
Correct answer is option 'C'. Can you explain this answer?
The band width, in a feedback amplifier.
a)
Remains unaffected
b)
Decreases by the same amount as the gain increase
c)
Increases by the same amount as the gain decrease
d)
Decreases by the same amount as the gain decrease
| | Nayanika Kaur answered |
Explanation: The bandwidth is defined as the difference in the higher frequency to the input frequency and increase in the bandwidth leads to the noise and in a feedback amplifier increases by the same amount as the gain decreases.
A digital measuring instrument employs a sampling rate of 100 samples/second. The sampled input x(n) is averaged using the difference equation:
Y (n) =[x (n)+x (n-1)+x(n-2)+x(n-4)/4] For a step input, the maximum time taken for the output to reach the final value after the input transition is - a)20 ms
- b)40 ms
- c)80 ms
- d)∞
Correct answer is option 'B'. Can you explain this answer?
A digital measuring instrument employs a sampling rate of 100 samples/second. The sampled input x(n) is averaged using the difference equation:
Y (n) =[x (n)+x (n-1)+x(n-2)+x(n-4)/4] For a step input, the maximum time taken for the output to reach the final value after the input transition is
Y (n) =[x (n)+x (n-1)+x(n-2)+x(n-4)/4] For a step input, the maximum time taken for the output to reach the final value after the input transition is
a)
20 ms
b)
40 ms
c)
80 ms
d)
∞
| | Saumya Sen answered |
Explanation: Since output y depends on input, such as no delay, delay by 1 unit, and delay by 2 unit, delay by 4 unit, so it will sum all the samples after 4 Ts (maximum delay), to get one sample of y[n].
T =40 msec.
T =40 msec.
Region of convergence of a causal LTI system- a)Is the entire s-plane
- b)Is the right-half of s-plane
- c)Is the left-half of s-plane
- d)Does not exist
Correct answer is option 'B'. Can you explain this answer?
Region of convergence of a causal LTI system
a)
Is the entire s-plane
b)
Is the right-half of s-plane
c)
Is the left-half of s-plane
d)
Does not exist
| | Arindam Sengupta answered |
Explanation: Causal system refers to the system that is only defined for the positive time system and for positive values and therefore region of convergence of a causal LTI system is right half of s-plane.
Assertion (A): The closed loop stability can be determined from the poles of an open loop system and the polar plot of the frequency response.
Reason (R): Unstable system has right half poles.- a)Both A and R are true and R is correct explanation of A
- b)Both A and R are true and R is not correct Explanation of A
- c)A is True and R is false
- d)A is False and R is true
Correct answer is option 'B'. Can you explain this answer?
Assertion (A): The closed loop stability can be determined from the poles of an open loop system and the polar plot of the frequency response.
Reason (R): Unstable system has right half poles.
Reason (R): Unstable system has right half poles.
a)
Both A and R are true and R is correct explanation of A
b)
Both A and R are true and R is not correct Explanation of A
c)
A is True and R is false
d)
A is False and R is true
| | Mansi Datta answered |
Explanation:
Open Loop Stability Analysis:
- The stability of a closed-loop system can be determined by analyzing the poles of the open-loop system.
- If any pole of the open-loop system lies in the right half of the complex plane, the system is considered unstable.
Polar Plot of Frequency Response:
- The polar plot of the frequency response can also provide valuable insights into the stability of the system.
- By examining the polar plot, one can determine the stability margins and gain and phase margins of the system.
Combining the Two Methods:
- By combining the information obtained from the poles of the open-loop system and the polar plot of the frequency response, one can effectively determine the closed-loop stability.
- An unstable system will have right-half-plane poles, indicating instability.
Conclusion:
- Therefore, both Assertion (A) and Reason (R) are true, and R provides a correct explanation of A.
- The poles of the open-loop system and the polar plot of the frequency response are crucial in determining the stability of a closed-loop system.
Consider the following statements regarding a linear discrete-time system:
H (z) = z2+1/(z+0.5)(z-0.5)
1. The system is stable
2. The initial value of h(0) of the impulse response is -4
3. The steady-state output is zero for a sinusoidal discrete time input of frequency equal to one-fourth the sampling frequency
Which of these statements are correct?- a)1,2 and 3
- b)1 and 2
- c)1 and 3
- d)2 and 3
Correct answer is option 'C'. Can you explain this answer?
Consider the following statements regarding a linear discrete-time system:
H (z) = z2+1/(z+0.5)(z-0.5)
1. The system is stable
2. The initial value of h(0) of the impulse response is -4
3. The steady-state output is zero for a sinusoidal discrete time input of frequency equal to one-fourth the sampling frequency
Which of these statements are correct?
H (z) = z2+1/(z+0.5)(z-0.5)
1. The system is stable
2. The initial value of h(0) of the impulse response is -4
3. The steady-state output is zero for a sinusoidal discrete time input of frequency equal to one-fourth the sampling frequency
Which of these statements are correct?
a)
1,2 and 3
b)
1 and 2
c)
1 and 3
d)
2 and 3
| | Muskaan Nair answered |
Explanation: Characteristic equation is (z+0.5) (z-0.5) =0
Its root are z =0.5, -0.5
Since both roots are inside the unit circle, hence the system is stable.
Its root are z =0.5, -0.5
Since both roots are inside the unit circle, hence the system is stable.
The principles of homogeneity and super position are applied to ____- a)Linear time variant systems
- b)Non - linear time varient systems
- c)Linear time invarient systems
- d)Non - linear time invariant systems.
Correct answer is option 'C'. Can you explain this answer?
The principles of homogeneity and super position are applied to ____
a)
Linear time variant systems
b)
Non - linear time varient systems
c)
Linear time invarient systems
d)
Non - linear time invariant systems.
| | Tarun Chawla answered |
The principal of superposition and homogeneity are applied to linear time invariant (LTI) system only.
Zero initial condition for a system means- a)Input reference signal is zero
- b)Zero stored energy
- c)Initial movement of moving parts
- d)System is at rest and no energy is stored in any of its components
Correct answer is option 'D'. Can you explain this answer?
Zero initial condition for a system means
a)
Input reference signal is zero
b)
Zero stored energy
c)
Initial movement of moving parts
d)
System is at rest and no energy is stored in any of its components
| | Hridoy Chakraborty answered |
Zero initial condition for a system means that the system is at rest and no energy is stored in any of its components. This concept is important in understanding the behavior of dynamic systems and is commonly used in control systems analysis and design.
Explanation:
System Initial Condition:
The initial condition of a system refers to the state of the system at the beginning of a given time period or at t=0. It represents the values of the system variables such as position, velocity, and energy before any input or disturbance is applied to the system.
Zero Initial Condition:
When a system has a zero initial condition, it means that the system is initially at rest and has no stored energy. In other words, all the system variables are zero at t=0. This implies that there is no initial movement of the moving parts and no energy stored in any of the components of the system.
Importance in Control Systems:
In control systems analysis and design, the concept of zero initial condition is crucial. It allows us to analyze the response of the system to various inputs or disturbances without considering the initial conditions. By assuming zero initial conditions, we can focus solely on the effect of the input signals on the system's output.
For example, when designing a controller for a mechanical system, we often assume zero initial conditions to simplify the analysis. This allows us to design a controller that only considers the input reference signal and does not need to account for the initial conditions of the system.
Assuming zero initial conditions also helps in simplifying the mathematical representation of the system. It allows us to neglect any terms or variables related to the initial conditions, making the analysis and calculations more straightforward.
In conclusion, zero initial condition for a system means that the system is at rest and has no stored energy. This concept is important in control systems analysis and design as it simplifies the analysis and allows us to focus on the effect of input signals on the system's output.
Explanation:
System Initial Condition:
The initial condition of a system refers to the state of the system at the beginning of a given time period or at t=0. It represents the values of the system variables such as position, velocity, and energy before any input or disturbance is applied to the system.
Zero Initial Condition:
When a system has a zero initial condition, it means that the system is initially at rest and has no stored energy. In other words, all the system variables are zero at t=0. This implies that there is no initial movement of the moving parts and no energy stored in any of the components of the system.
Importance in Control Systems:
In control systems analysis and design, the concept of zero initial condition is crucial. It allows us to analyze the response of the system to various inputs or disturbances without considering the initial conditions. By assuming zero initial conditions, we can focus solely on the effect of the input signals on the system's output.
For example, when designing a controller for a mechanical system, we often assume zero initial conditions to simplify the analysis. This allows us to design a controller that only considers the input reference signal and does not need to account for the initial conditions of the system.
Assuming zero initial conditions also helps in simplifying the mathematical representation of the system. It allows us to neglect any terms or variables related to the initial conditions, making the analysis and calculations more straightforward.
In conclusion, zero initial condition for a system means that the system is at rest and has no stored energy. This concept is important in control systems analysis and design as it simplifies the analysis and allows us to focus on the effect of input signals on the system's output.
The characteristic equation of a control system is given by s6+2s5+8s4+12s3+20s2+16s+16=0 . The number of the roots of the equation which lie on the imaginary axis of s-plane: - a)0
- b)2
- c)4
- d)6
Correct answer is option 'C'. Can you explain this answer?
The characteristic equation of a control system is given by s6+2s5+8s4+12s3+20s2+16s+16=0 . The number of the roots of the equation which lie on the imaginary axis of s-plane:
a)
0
b)
2
c)
4
d)
6
| | Rahul Banerjee answered |
Explanation: The stability analysis is done using Routh-Hurwitz criterion and hence the number of roots on the right is calculated.
Effect of feedback on sensitivity is minimum in:- a)Open loop control system
- b)Closed loop control system
- c)None of the mentioned
- d)Both of the mentioned
Correct answer is option 'B'. Can you explain this answer?
Effect of feedback on sensitivity is minimum in:
a)
Open loop control system
b)
Closed loop control system
c)
None of the mentioned
d)
Both of the mentioned
| | Gargi Basak answered |
Explanation: Sensitivity is defined as the change in output with respect to change in parameter or input and for a good control system the sensitivity must be less and in closed loop control system it gets reduced by the factor of 1/(1+GH).
Assertion (A): The z-transform of the output of the sampler is given by the series.
Reason (R): The relationship is the result of the application of z = e-sT, where T stands for the time gap between the samples.- a)Both A and R are true and R is correct explanation of A
- b)Both A and R are true but R is not correct explanation of A
- c)A is true but R is false
- d)A is false but R is true
Correct answer is option 'C'. Can you explain this answer?
Assertion (A): The z-transform of the output of the sampler is given by the series.
Reason (R): The relationship is the result of the application of z = e-sT, where T stands for the time gap between the samples.
Reason (R): The relationship is the result of the application of z = e-sT, where T stands for the time gap between the samples.
a)
Both A and R are true and R is correct explanation of A
b)
Both A and R are true but R is not correct explanation of A
c)
A is true but R is false
d)
A is false but R is true
| | Prasenjit Yadav answered |
Assertion (A): The z-transform of the output of the sampler is given by the series.
Reason (R): The relationship is the result of the application of z = e^(-sT), where T stands for the time gap between the samples.
Explanation:
The z-transform is a mathematical transformation that is used to analyze and process discrete-time signals. It is the discrete-time counterpart of the Laplace transform, which is used for continuous-time signals.
The z-transform of a discrete-time signal x[n] is defined as the infinite sum:
X(z) = Σ(x[n] * z^(-n)), where n ranges from -∞ to ∞.
The z-transform can be used to analyze the frequency content and behavior of discrete-time signals. It is particularly useful for analyzing linear time-invariant (LTI) systems, which are systems whose behavior does not change over time.
Assertion (A): The z-transform of the output of the sampler is given by the series.
This statement is true. The output of a sampler is a discrete-time signal, and the z-transform is used to analyze discrete-time signals. Therefore, the z-transform of the output of the sampler can be represented as a series.
Reason (R): The relationship is the result of the application of z = e^(-sT), where T stands for the time gap between the samples.
This statement is false. The relationship between z and s is given by z = e^(sT), where T is the sampling period. This relationship allows us to convert a continuous-time transfer function into a discrete-time transfer function using the z-transform. The z-transform is then used to analyze the discrete-time system.
Therefore, the correct answer is option C: A is true but R is false. The z-transform of the output of the sampler is given by a series, but the relationship between z and s is z = e^(sT), not z = e^(-sT).
Reason (R): The relationship is the result of the application of z = e^(-sT), where T stands for the time gap between the samples.
Explanation:
The z-transform is a mathematical transformation that is used to analyze and process discrete-time signals. It is the discrete-time counterpart of the Laplace transform, which is used for continuous-time signals.
The z-transform of a discrete-time signal x[n] is defined as the infinite sum:
X(z) = Σ(x[n] * z^(-n)), where n ranges from -∞ to ∞.
The z-transform can be used to analyze the frequency content and behavior of discrete-time signals. It is particularly useful for analyzing linear time-invariant (LTI) systems, which are systems whose behavior does not change over time.
Assertion (A): The z-transform of the output of the sampler is given by the series.
This statement is true. The output of a sampler is a discrete-time signal, and the z-transform is used to analyze discrete-time signals. Therefore, the z-transform of the output of the sampler can be represented as a series.
Reason (R): The relationship is the result of the application of z = e^(-sT), where T stands for the time gap between the samples.
This statement is false. The relationship between z and s is given by z = e^(sT), where T is the sampling period. This relationship allows us to convert a continuous-time transfer function into a discrete-time transfer function using the z-transform. The z-transform is then used to analyze the discrete-time system.
Therefore, the correct answer is option C: A is true but R is false. The z-transform of the output of the sampler is given by a series, but the relationship between z and s is z = e^(sT), not z = e^(-sT).
Assertion (A): The system function
H(z) = z3-2z2+z/z2+1/4z+1/s is not causal
Reason (R): If the numerator of H (z) is of lower order than the denominator, the system may be causal.- a)Both A and R are true and R is correct explanation of A
- b)Both A and R are true and R is not correct Explanation of A
- c)A is True and R is false
- d)A is False and R is true
Correct answer is option 'A'. Can you explain this answer?
Assertion (A): The system function
H(z) = z3-2z2+z/z2+1/4z+1/s is not causal
Reason (R): If the numerator of H (z) is of lower order than the denominator, the system may be causal.
H(z) = z3-2z2+z/z2+1/4z+1/s is not causal
Reason (R): If the numerator of H (z) is of lower order than the denominator, the system may be causal.
a)
Both A and R are true and R is correct explanation of A
b)
Both A and R are true and R is not correct Explanation of A
c)
A is True and R is false
d)
A is False and R is true
| | Sharmila Bajaj answered |
Explanation: The transfer function is not causal as for causality the numerator of H (z) is of lower order than the denominator, the system may be causal.
What is the number of roots of the polynomial F(z) = 4z3-8z2-z+2, lying outside the unit circle? - a)0
- b)1
- c)2
- d)3
Correct answer is option 'B'. Can you explain this answer?
What is the number of roots of the polynomial F(z) = 4z3-8z2-z+2, lying outside the unit circle?
a)
0
b)
1
c)
2
d)
3
| | Muskaan Nair answered |
Explanation: Factorizing F (z) and then the factors are the roots which here come out to be 3.
Assertion (A): Z-transform is used to analyze discrete time systems and it is also called pulsed transfer function approach.
Reason(R): The sampled signal is assumed to be a train of impulses whose strengths, or areas, are equal to the continuous time signal at the sampling instants.- a)Both A and R are true and R is correct explanation of A
- b)Both A and R are true and R is not correct Explanation of A
- c)A is True and R is false
- d)A is False and R is true
Correct answer is option 'A'. Can you explain this answer?
Assertion (A): Z-transform is used to analyze discrete time systems and it is also called pulsed transfer function approach.
Reason(R): The sampled signal is assumed to be a train of impulses whose strengths, or areas, are equal to the continuous time signal at the sampling instants.
Reason(R): The sampled signal is assumed to be a train of impulses whose strengths, or areas, are equal to the continuous time signal at the sampling instants.
a)
Both A and R are true and R is correct explanation of A
b)
Both A and R are true and R is not correct Explanation of A
c)
A is True and R is false
d)
A is False and R is true
| | Pranab Basu answered |
Assertion (A): The Z-transform is used to analyze discrete-time systems, and it is also called the pulsed transfer function approach.
Reason (R): The sampled signal is assumed to be a train of impulses whose strengths, or areas, are equal to the continuous-time signal at the sampling instants.
Explanation:
The Z-transform is a mathematical tool used to analyze discrete-time systems in the field of signal processing and control systems. It is the discrete-time counterpart of the Laplace transform, which is used for continuous-time systems.
The Z-transform is often used to analyze the behavior of discrete-time signals and systems in the frequency domain. It provides a way to represent discrete-time signals as polynomials in the complex variable z, where z can be any complex number. By applying the Z-transform to a discrete-time signal, we can obtain its representation in the Z-domain, which allows us to analyze its frequency content and other properties.
Assertion (A): The statement that the Z-transform is used to analyze discrete-time systems is true. It is a widely used tool in the field of signal processing and control systems for the analysis and design of discrete-time systems.
Reason (R): The statement that the sampled signal is assumed to be a train of impulses whose strengths, or areas, are equal to the continuous-time signal at the sampling instants is also true. This assumption is based on the concept of sampling, where a continuous-time signal is converted into a discrete-time signal by taking samples at regular intervals. Each sample is represented by an impulse whose magnitude is equal to the value of the continuous-time signal at the sampling instant.
The Z-transform provides a way to mathematically represent this relationship between the continuous-time signal and the discrete-time samples. By applying the Z-transform to the sampled signal, we can obtain its representation in the Z-domain, which allows us to analyze its frequency content and other properties.
Conclusion: Both the assertion (A) and the reason (R) are true, and the reason (R) provides a correct explanation for the assertion (A). The Z-transform is indeed used to analyze discrete-time systems, and the assumption of a train of impulses represents the relationship between the continuous-time signal and the discrete-time samples.
Reason (R): The sampled signal is assumed to be a train of impulses whose strengths, or areas, are equal to the continuous-time signal at the sampling instants.
Explanation:
The Z-transform is a mathematical tool used to analyze discrete-time systems in the field of signal processing and control systems. It is the discrete-time counterpart of the Laplace transform, which is used for continuous-time systems.
The Z-transform is often used to analyze the behavior of discrete-time signals and systems in the frequency domain. It provides a way to represent discrete-time signals as polynomials in the complex variable z, where z can be any complex number. By applying the Z-transform to a discrete-time signal, we can obtain its representation in the Z-domain, which allows us to analyze its frequency content and other properties.
Assertion (A): The statement that the Z-transform is used to analyze discrete-time systems is true. It is a widely used tool in the field of signal processing and control systems for the analysis and design of discrete-time systems.
Reason (R): The statement that the sampled signal is assumed to be a train of impulses whose strengths, or areas, are equal to the continuous-time signal at the sampling instants is also true. This assumption is based on the concept of sampling, where a continuous-time signal is converted into a discrete-time signal by taking samples at regular intervals. Each sample is represented by an impulse whose magnitude is equal to the value of the continuous-time signal at the sampling instant.
The Z-transform provides a way to mathematically represent this relationship between the continuous-time signal and the discrete-time samples. By applying the Z-transform to the sampled signal, we can obtain its representation in the Z-domain, which allows us to analyze its frequency content and other properties.
Conclusion: Both the assertion (A) and the reason (R) are true, and the reason (R) provides a correct explanation for the assertion (A). The Z-transform is indeed used to analyze discrete-time systems, and the assumption of a train of impulses represents the relationship between the continuous-time signal and the discrete-time samples.
A node having only outgoing branches.- a)Input node
- b)Output node
- c)Incoming node
- d)Outgoing node
Correct answer is option 'A'. Can you explain this answer?
A node having only outgoing branches.
a)
Input node
b)
Output node
c)
Incoming node
d)
Outgoing node
| | Ishani Iyer answered |
Explanation: Nodes are the point by which the branches are outgoing or ingoing and this can be input or output node and input node is the node having only outgoing branches.
A signal m(t) with bandwidth 500 Hz is first multiplied by a signal g(t). The resulting signal is passed through an ideal low pass filter with bandwidth 1 kHz. The output of the low pass filter would be :- a)Impulse
- b)m(t)
- c)0
- d)m(t)del(t)
Correct answer is option 'C'. Can you explain this answer?
A signal m(t) with bandwidth 500 Hz is first multiplied by a signal g(t). The resulting signal is passed through an ideal low pass filter with bandwidth 1 kHz. The output of the low pass filter would be :
a)
Impulse
b)
m(t)
c)
0
d)
m(t)del(t)
| | Hridoy Chakraborty answered |
Explanation: m (t) g (t)->M (f)*G (f)
After low pass filtering with fc =1 kHz, hence the output is zero.
After low pass filtering with fc =1 kHz, hence the output is zero.
The auto-correlation function of a rectangular pulse of duration T is- a)A rectangular pulse of duration T
- b)A rectangular pulse of duration 2T
- c)A triangular pulse of duration T
- d)A triangular pulse of duration 2T
Correct answer is option 'D'. Can you explain this answer?
The auto-correlation function of a rectangular pulse of duration T is
a)
A rectangular pulse of duration T
b)
A rectangular pulse of duration 2T
c)
A triangular pulse of duration T
d)
A triangular pulse of duration 2T
| | Debanshi Basak answered |
Explanation: The auto-correlation function is the method of correlating the various instants of the signal with itself and that of a rectangular pulse of duration T is a triangular pulse of duration 2T.
Signal flow graph is a - a)semilog graph
- b)log-log graph
- c)topological representation of a set of differential equations
- d)a special type of graph for analysis of modern control system
Correct answer is option 'C'. Can you explain this answer?
Signal flow graph is a
a)
semilog graph
b)
log-log graph
c)
topological representation of a set of differential equations
d)
a special type of graph for analysis of modern control system
 | Starcoders answered |
Concept:
- A signal flow graph is a graphical representation of a set of linear algebraic or differential equations. It is a diagram that represents a set of simultaneous linear equations using nodes and directed branches. In control system engineering, signal flow graphs are used to quickly solve the equations related to systems.
- Each node represents a system variable, and each directed branch represents a gain or a multiplication factor between two variables. The direction of the arrow represents the direction of the flow of the signal. The summing and branching points are used to represent system equations in a graphical way.
- Although signal flow graphs are used in the analysis of control systems (option 4), it's not a special type of graph solely for modern control systems. They can be used for a variety of applications involving sets of linear equations, not just modern control systems.
Node:
- A node that has only outgoing branches called input mode
- Which has only incoming branches, known as an output node
- Which has both incoming & outgoing branches, mixed node.
Branch:
- It is an alone segment that joins two nodes.
- It has both gain & direction
Homogeneous solution of: y(n) -9/16y(n-2) = x(n-1) - a)C1(3/4)n+C2(3/4)-n
- b)C1-(3/4)n-1+C2(3/4)n-1
- c)C1(3/4)n
- d)C1-(3/4)n
Correct answer is option 'A'. Can you explain this answer?
Homogeneous solution of: y(n) -9/16y(n-2) = x(n-1)
a)
C1(3/4)n+C2(3/4)-n
b)
C1-(3/4)n-1+C2(3/4)n-1
c)
C1(3/4)n
d)
C1-(3/4)n
| | Maulik Chatterjee answered |
To solve the given difference equation and find the homogeneous solution, we can use the method of characteristic equation.
The given difference equation is y(n) - 9/16y(n-2) = x(n-1).
1. Characteristic Equation:
To find the characteristic equation, we assume a homogeneous solution of the form y(n) = r^n, where r is a constant to be determined. Substituting this into the difference equation, we get:
r^n - 9/16r^(n-2) = 0
Simplifying the equation, we can rewrite it as:
r^n - (9/16)r^(n-2) = 0
16r^n - 9r^(n-2) = 0
16r^2 - 9 = 0
2. Solving the Characteristic Equation:
To solve the characteristic equation, we can factorize it as follows:
(4r - 3)(4r + 3) = 0
This gives us two possible values for r:
r1 = 3/4
r2 = -3/4
3. Homogeneous Solution:
The homogeneous solution of the difference equation can be written as a linear combination of the solutions obtained from the characteristic equation. Let's assume the homogeneous solution as yh(n) = C1(3/4)^n + C2(-3/4)^n, where C1 and C2 are constants to be determined.
Therefore, the correct answer is option 'A': yh(n) = C1(3/4)^n + C2(-3/4)^n.
The given difference equation is y(n) - 9/16y(n-2) = x(n-1).
1. Characteristic Equation:
To find the characteristic equation, we assume a homogeneous solution of the form y(n) = r^n, where r is a constant to be determined. Substituting this into the difference equation, we get:
r^n - 9/16r^(n-2) = 0
Simplifying the equation, we can rewrite it as:
r^n - (9/16)r^(n-2) = 0
16r^n - 9r^(n-2) = 0
16r^2 - 9 = 0
2. Solving the Characteristic Equation:
To solve the characteristic equation, we can factorize it as follows:
(4r - 3)(4r + 3) = 0
This gives us two possible values for r:
r1 = 3/4
r2 = -3/4
3. Homogeneous Solution:
The homogeneous solution of the difference equation can be written as a linear combination of the solutions obtained from the characteristic equation. Let's assume the homogeneous solution as yh(n) = C1(3/4)^n + C2(-3/4)^n, where C1 and C2 are constants to be determined.
Therefore, the correct answer is option 'A': yh(n) = C1(3/4)^n + C2(-3/4)^n.
Multiple signals as input can be used in which systems:- a)Feedback systems
- b)Non feedback systems
- c)Feedforward systems
- d)None of the mentioned
Correct answer is option 'A'. Can you explain this answer?
Multiple signals as input can be used in which systems:
a)
Feedback systems
b)
Non feedback systems
c)
Feedforward systems
d)
None of the mentioned
| | Srestha Kumar answered |
Explanation: As in feedback system output can be obtained for more than one input as output can be generated for both the reference input and also for the disturbance input.
The DFT of a signal x(n) of length N is X(k). When X(k) is given and x(n) is computed from it, the length of x(n)- a)Is increased to infinity
- b)Remains N
- c)Becomes 2N – 1
- d)Becomes N2
Correct answer is option 'A'. Can you explain this answer?
The DFT of a signal x(n) of length N is X(k). When X(k) is given and x(n) is computed from it, the length of x(n)
a)
Is increased to infinity
b)
Remains N
c)
Becomes 2N – 1
d)
Becomes N2
| | Kiran Iyer answered |
Explanation: When X (k) is given and x (n) is computed from it, the length of x (n) is increased to infinity.
Consider the block diagram shown below:
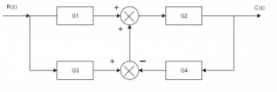
If the transfer function of the system is given by T(s)=G1G2+G2G3/1+X. Then X is: - a)G2G3G4
- b)G2G4
- c)G1G2G4
- d)G3G4
Correct answer is option 'B'. Can you explain this answer?
Consider the block diagram shown below:
If the transfer function of the system is given by T(s)=G1G2+G2G3/1+X. Then X is:
If the transfer function of the system is given by T(s)=G1G2+G2G3/1+X. Then X is:
a)
G2G3G4
b)
G2G4
c)
G1G2G4
d)
G3G4
| | Sakshi Roy answered |
Explanation: Use the technique of making two different block diagram by dividing two summers and use the approaches of shifting take off point and blocks.
Assertion (A): For the rational transfer function H(z) to be causal, stable and causally invertible, both the zeroes and the poles should lie within the unit circle in the z-plane.
Reason (R): For a rational system, ROC is bounded by poles- a)Both A and R are true and R is the correct explanation of A
- b)Both A and R are true bit R is NOT the correct explanation of A
- c)A is true but R is false
- d)A is false but R is true
Correct answer is option 'B'. Can you explain this answer?
Assertion (A): For the rational transfer function H(z) to be causal, stable and causally invertible, both the zeroes and the poles should lie within the unit circle in the z-plane.
Reason (R): For a rational system, ROC is bounded by poles
Reason (R): For a rational system, ROC is bounded by poles
a)
Both A and R are true and R is the correct explanation of A
b)
Both A and R are true bit R is NOT the correct explanation of A
c)
A is true but R is false
d)
A is false but R is true
| | Aman Datta answered |
Explanation: For the rational transfer function H (z) to be causal, stable and causally invertible, both the zeroes and the poles should lie within the unit circle in the z-plane. For a rational system, ROC is bounded by poles.
Which of the following may result in instability problem?- a)Large error
- b)High selectivity
- c)High gain
- d)Noise
Correct answer is option 'C'. Can you explain this answer?
Which of the following may result in instability problem?
a)
Large error
b)
High selectivity
c)
High gain
d)
Noise
| | Vaishnavi Singh answered |
Explanation: High gain results in instability problem and this is due to the low damping factor and damping factor is inversely proportional to the gain of the system.
The Routh-Hurwitz criterion cannot be applied when the characteristic equation of the system contains any coefficients which is :- a)Negative real and exponential function
- b)Negative real, both exponential and sinusoidal function of s
- c)Both exponential and sinusoidal function of s
- d)Complex, both exponential and sinusoidal function of s
Correct answer is option 'B'. Can you explain this answer?
The Routh-Hurwitz criterion cannot be applied when the characteristic equation of the system contains any coefficients which is :
a)
Negative real and exponential function
b)
Negative real, both exponential and sinusoidal function of s
c)
Both exponential and sinusoidal function of s
d)
Complex, both exponential and sinusoidal function of s
| | Pallabi Pillai answered |
Explanation:
The Routh-Hurwitz criterion is a mathematical method used to determine the stability of a linear time-invariant (LTI) system by examining the coefficients of its characteristic equation. The characteristic equation is obtained by setting the denominator of the transfer function equal to zero.
The Routh-Hurwitz criterion is based on the fact that the stability of a system can be determined by analyzing the signs of the coefficients of the characteristic equation. However, there are certain cases where the Routh-Hurwitz criterion cannot be applied. One such case is when the characteristic equation contains coefficients that are negative real, exponential, and sinusoidal functions of 's'.
Reason:
The Routh-Hurwitz criterion is based on the assumption that the coefficients of the characteristic equation are real numbers. However, when the characteristic equation contains coefficients that are negative real, exponential, and sinusoidal functions of 's', it violates this assumption and the Routh-Hurwitz criterion cannot be directly applied.
Explanation of Option B:
Option B states that the Routh-Hurwitz criterion cannot be applied when the characteristic equation contains coefficients that are negative real, exponential, and sinusoidal functions of 's'. This option is correct because the Routh-Hurwitz criterion is not applicable in such cases due to the violation of the assumption that the coefficients are real numbers.
Example:
Let's consider an example to illustrate this. Suppose we have a characteristic equation given by:
s^2 + (3e^(-s) - sin(s))s + 2 = 0
In this equation, the coefficient of 's' is a combination of a negative real number (3e^(-s)) and a sinusoidal function (-sin(s)). Since the coefficient is not a real number, the Routh-Hurwitz criterion cannot be applied.
Conclusion:
In conclusion, the Routh-Hurwitz criterion cannot be applied when the characteristic equation of the system contains coefficients that are negative real, exponential, and sinusoidal functions of 's'. This is because the Routh-Hurwitz criterion is based on the assumption that the coefficients are real numbers.
The Routh-Hurwitz criterion is a mathematical method used to determine the stability of a linear time-invariant (LTI) system by examining the coefficients of its characteristic equation. The characteristic equation is obtained by setting the denominator of the transfer function equal to zero.
The Routh-Hurwitz criterion is based on the fact that the stability of a system can be determined by analyzing the signs of the coefficients of the characteristic equation. However, there are certain cases where the Routh-Hurwitz criterion cannot be applied. One such case is when the characteristic equation contains coefficients that are negative real, exponential, and sinusoidal functions of 's'.
Reason:
The Routh-Hurwitz criterion is based on the assumption that the coefficients of the characteristic equation are real numbers. However, when the characteristic equation contains coefficients that are negative real, exponential, and sinusoidal functions of 's', it violates this assumption and the Routh-Hurwitz criterion cannot be directly applied.
Explanation of Option B:
Option B states that the Routh-Hurwitz criterion cannot be applied when the characteristic equation contains coefficients that are negative real, exponential, and sinusoidal functions of 's'. This option is correct because the Routh-Hurwitz criterion is not applicable in such cases due to the violation of the assumption that the coefficients are real numbers.
Example:
Let's consider an example to illustrate this. Suppose we have a characteristic equation given by:
s^2 + (3e^(-s) - sin(s))s + 2 = 0
In this equation, the coefficient of 's' is a combination of a negative real number (3e^(-s)) and a sinusoidal function (-sin(s)). Since the coefficient is not a real number, the Routh-Hurwitz criterion cannot be applied.
Conclusion:
In conclusion, the Routh-Hurwitz criterion cannot be applied when the characteristic equation of the system contains coefficients that are negative real, exponential, and sinusoidal functions of 's'. This is because the Routh-Hurwitz criterion is based on the assumption that the coefficients are real numbers.
When deriving the transfer function of a linear element- a)Both initial conditions and loading are taken into account
- b)Initial conditions are taken into account but the element is assumed to be not loaded
- c)Initial conditions are assumed to be zero but loading is taken into account
- d)Initial conditions are assumed to be zero and the element is assumed to be not loaded
Correct answer is option 'C'. Can you explain this answer?
When deriving the transfer function of a linear element
a)
Both initial conditions and loading are taken into account
b)
Initial conditions are taken into account but the element is assumed to be not loaded
c)
Initial conditions are assumed to be zero but loading is taken into account
d)
Initial conditions are assumed to be zero and the element is assumed to be not loaded
 | Anirban Khanna answered |
When deriving the transfer function of a linear element only initial conditions are assumed to be zero, loading cannot be assumed to be zero.
A linear system at rest is subject to an input signal r(t)=1-e-t. The response of the system for t>0 is given by c(t)=1-e-2t. The transfer function of the system is: - a)(s+2)/(s+1)
- b)(s+1)/(s+2)
- c)2(s+1)/(s+2)
- d)(s+1)/2(s+2)
Correct answer is option 'C'. Can you explain this answer?
A linear system at rest is subject to an input signal r(t)=1-e-t. The response of the system for t>0 is given by c(t)=1-e-2t. The transfer function of the system is:
a)
(s+2)/(s+1)
b)
(s+1)/(s+2)
c)
2(s+1)/(s+2)
d)
(s+1)/2(s+2)
| | Ritika Mukherjee answered |
Explanation: c(t)=1-e-2t
R(s)=1/s-1/s+1
C(s)=1/s-1/s+2
Tf=2(s+1)/(s+2).
R(s)=1/s-1/s+1
C(s)=1/s-1/s+2
Tf=2(s+1)/(s+2).
In closed loop control system, what is the sensitivity of the gain of the overall system, M to the variation in G?- a)1/1+GH
- b)1/1+G
- c)G/1GH
- d)G/1+G
Correct answer is option 'A'. Can you explain this answer?
In closed loop control system, what is the sensitivity of the gain of the overall system, M to the variation in G?
a)
1/1+GH
b)
1/1+G
c)
G/1GH
d)
G/1+G
| | Arshiya Basu answered |
In a closed-loop control system, the sensitivity of the gain of the overall system, M, to the variation in G is given by 1/1 GH.
Understanding Closed-loop Control System:
A closed-loop control system is a system that uses feedback to control the output based on the desired input. It consists of a controller, a plant, and a feedback element. The controller compares the desired input with the actual output and generates a control signal to adjust the plant's operation. The feedback element measures the output and provides feedback to the controller.
Sensitivity of the Gain:
The sensitivity of the gain of the overall system, M, to the variation in G can be defined as the change in the gain M with respect to a small change in G. Mathematically, it can be expressed as:
Sensitivity (S) = dM/dG
To calculate the sensitivity, we differentiate the gain M with respect to G.
Calculating Sensitivity:
Let's consider the transfer function of the system as:
H = G/(1+GH)
Here, H represents the transfer function of the closed-loop system, and G represents the transfer function of the plant.
To determine the sensitivity, we differentiate the transfer function H with respect to G.
dH/dG = 1/(1+GH) - GH/(1+GH)^2
Now, we calculate the sensitivity of the gain M to the variation in G by using the formula:
Sensitivity (S) = (dH/dG) * (dM/dH)
Since the gain M is defined as M = GH, the differentiation of M with respect to H is:
dM/dH = G
Substituting the values of dH/dG and dM/dH in the sensitivity formula, we get:
Sensitivity (S) = (1/(1+GH) - GH/(1+GH)^2) * G
Simplifying the expression, we get:
Sensitivity (S) = 1/1 GH
Therefore, the sensitivity of the gain of the overall system, M, to the variation in G is given by 1/1 GH.
Summary:
In a closed-loop control system, the sensitivity of the gain of the overall system, M, to the variation in G is calculated by differentiating the transfer function H with respect to G and then multiplying it with the differentiation of M with respect to H. The expression for the sensitivity is 1/1 GH.
Understanding Closed-loop Control System:
A closed-loop control system is a system that uses feedback to control the output based on the desired input. It consists of a controller, a plant, and a feedback element. The controller compares the desired input with the actual output and generates a control signal to adjust the plant's operation. The feedback element measures the output and provides feedback to the controller.
Sensitivity of the Gain:
The sensitivity of the gain of the overall system, M, to the variation in G can be defined as the change in the gain M with respect to a small change in G. Mathematically, it can be expressed as:
Sensitivity (S) = dM/dG
To calculate the sensitivity, we differentiate the gain M with respect to G.
Calculating Sensitivity:
Let's consider the transfer function of the system as:
H = G/(1+GH)
Here, H represents the transfer function of the closed-loop system, and G represents the transfer function of the plant.
To determine the sensitivity, we differentiate the transfer function H with respect to G.
dH/dG = 1/(1+GH) - GH/(1+GH)^2
Now, we calculate the sensitivity of the gain M to the variation in G by using the formula:
Sensitivity (S) = (dH/dG) * (dM/dH)
Since the gain M is defined as M = GH, the differentiation of M with respect to H is:
dM/dH = G
Substituting the values of dH/dG and dM/dH in the sensitivity formula, we get:
Sensitivity (S) = (1/(1+GH) - GH/(1+GH)^2) * G
Simplifying the expression, we get:
Sensitivity (S) = 1/1 GH
Therefore, the sensitivity of the gain of the overall system, M, to the variation in G is given by 1/1 GH.
Summary:
In a closed-loop control system, the sensitivity of the gain of the overall system, M, to the variation in G is calculated by differentiating the transfer function H with respect to G and then multiplying it with the differentiation of M with respect to H. The expression for the sensitivity is 1/1 GH.
The characteristic equation of the control system is s5+15s4+85s3+225s2+274s+120=0 . What are the number of roots of the equation which lie to the left of the line s+1 = 0? - a)2
- b)3
- c)4
- d)5
Correct answer is option 'C'. Can you explain this answer?
The characteristic equation of the control system is s5+15s4+85s3+225s2+274s+120=0 . What are the number of roots of the equation which lie to the left of the line s+1 = 0?
a)
2
b)
3
c)
4
d)
5
| | Devansh Das answered |
Explanation: The solution is obtained with the help of the Routh-Hurwitz table and in this the solution is obtained by equating the value as s-1 in the given equation.
Chapter doubts & questions for Introduction to Digital Control - 3 Months Preparation for GATE Electrical 2026 is part of Electrical Engineering (EE) exam preparation. The chapters have been prepared according to the Electrical Engineering (EE) exam syllabus. The Chapter doubts & questions, notes, tests & MCQs are made for Electrical Engineering (EE) 2026 Exam. Find important definitions, questions, notes, meanings, examples, exercises, MCQs and online tests here.
Chapter doubts & questions of Introduction to Digital Control - 3 Months Preparation for GATE Electrical in English & Hindi are available as part of Electrical Engineering (EE) exam. Download more important topics, notes, lectures and mock test series for Electrical Engineering (EE) Exam by signing up for free.
3 Months Preparation for GATE Electrical676 videos|1399 docs|882 tests |