










All Exams > Electrical Engineering (EE) > 3 Months Preparation for GATE Electrical > All Questions
All questions of Time response of discrete systems for Electrical Engineering (EE) Exam
The nature of transient response is revealed by ______________- a)Sine wave
- b)Cos wave
- c)Tan wave
- d)Test signals
Correct answer is option 'D'. Can you explain this answer?
The nature of transient response is revealed by ______________
a)
Sine wave
b)
Cos wave
c)
Tan wave
d)
Test signals
| | Sanya Agarwal answered |
Answer: d.
Explanation: The nature is dependent on system poles not on the dynamic inputs.
Explanation: The nature is dependent on system poles not on the dynamic inputs.

The transfer function of the system is G(s) =100/(s+1) (s+100). For a unit step input to the system the approximate settling time for 2% criterion is:- a)100 sec
- b)4 sec
- c)1 sec
- d)0.01 sec
Correct answer is option 'B'. Can you explain this answer?
The transfer function of the system is G(s) =100/(s+1) (s+100). For a unit step input to the system the approximate settling time for 2% criterion is:
a)
100 sec
b)
4 sec
c)
1 sec
d)
0.01 sec
| | Tanvi Rane answered |
Given transfer function: G(s) = 100/(s+1)(s+100)
We need to find the approximate settling time for 2% criterion for a unit step input.
Step 1: Find the poles of the transfer function
The poles of the transfer function are located at s = -1 and s = -100.
Step 2: Find the dominant pole
The dominant pole is the pole that is closest to the imaginary axis. In this case, the pole at s = -1 is closer to the imaginary axis than the pole at s = -100. Therefore, the dominant pole is s = -1.
Step 3: Find the time constant
The time constant is the inverse of the real part of the dominant pole. In this case, the real part of the dominant pole is -1. Therefore, the time constant is 1/1 = 1 second.
Step 4: Find the settling time for 2% criterion
The settling time for 2% criterion is approximately equal to 4 times the time constant. Therefore, the settling time is:
Settling time = 4 x 1 = 4 seconds
Therefore, the approximate settling time for 2% criterion for a unit step input is 4 seconds.
We need to find the approximate settling time for 2% criterion for a unit step input.
Step 1: Find the poles of the transfer function
The poles of the transfer function are located at s = -1 and s = -100.
Step 2: Find the dominant pole
The dominant pole is the pole that is closest to the imaginary axis. In this case, the pole at s = -1 is closer to the imaginary axis than the pole at s = -100. Therefore, the dominant pole is s = -1.
Step 3: Find the time constant
The time constant is the inverse of the real part of the dominant pole. In this case, the real part of the dominant pole is -1. Therefore, the time constant is 1/1 = 1 second.
Step 4: Find the settling time for 2% criterion
The settling time for 2% criterion is approximately equal to 4 times the time constant. Therefore, the settling time is:
Settling time = 4 x 1 = 4 seconds
Therefore, the approximate settling time for 2% criterion for a unit step input is 4 seconds.
Find the type and order of the system given below: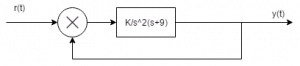
- a)2,3
- b)2,2
- c)3,3
- d)None of the mentioned
Correct answer is option 'B'. Can you explain this answer?
Find the type and order of the system given below:
a)
2,3
b)
2,2
c)
3,3
d)
None of the mentioned
| | Nitya Chopra answered |
Answer: Type = 2 which is the number of poles at the origin and order is the highest power of the characteristic equation.
Normalized difference between the time response peak and steady state output is ______________- a) Maximum peak overshoot
- b) Damping factor
- c) Minimum peak overshoot
- d) Undershoot
Correct answer is option 'A'. Can you explain this answer?
Normalized difference between the time response peak and steady state output is ______________
a)
Maximum peak overshootb)
Damping factorc)
Minimum peak overshootd)
Undershoot  | Mrinalini Sen answered |
Maximum peak overshoot is the normalized difference between the time response peak and steady state output.
What will be the nature of time response if the roots of the characteristic equation are located on the s-plane imaginary axis?- a)Oscillations
- b)Damped oscillations
- c)No oscillations
- d)Under damped oscilaations
Correct answer is option 'C'. Can you explain this answer?
What will be the nature of time response if the roots of the characteristic equation are located on the s-plane imaginary axis?
a)
Oscillations
b)
Damped oscillations
c)
No oscillations
d)
Under damped oscilaations
| | Poulomi Chopra answered |
Answer: c
Explanation: complex conjugate (non-multiple): oscillatory (sustained oscillations)
Complex conjugate (multiple): unstable (growing oscillations).
Explanation: complex conjugate (non-multiple): oscillatory (sustained oscillations)
Complex conjugate (multiple): unstable (growing oscillations).
The step response of the system is c(t) = 10+8e-t-4/8e-2t . The gain in time constant form of transfer function will be: - a)-7
- b)7
- c)7.5
- d)-7.5
Correct answer is option 'D'. Can you explain this answer?
The step response of the system is c(t) = 10+8e-t-4/8e-2t . The gain in time constant form of transfer function will be:
a)
-7
b)
7
c)
7.5
d)
-7.5
 | Swara Dasgupta answered |
Differentiating the equation and getting the impulse response and then taking the inverse Laplace transform and converting the form into time constant form we get K = -7.5.
Which of the following quantities give a measure of the transient characteristics of a control system, when subjected to unit step excitation.
1. Maximum overshoot
2. Maximum undershoot
3. Overall gain
4. Delay time
5. Rise time
6. Fall time- a)1,3 and 5
- b)2, 4 and 5
- c)2,4 and 6
- d)1,4 and 5
Correct answer is option 'D'. Can you explain this answer?
Which of the following quantities give a measure of the transient characteristics of a control system, when subjected to unit step excitation.
1. Maximum overshoot
2. Maximum undershoot
3. Overall gain
4. Delay time
5. Rise time
6. Fall time
1. Maximum overshoot
2. Maximum undershoot
3. Overall gain
4. Delay time
5. Rise time
6. Fall time
a)
1,3 and 5
b)
2, 4 and 5
c)
2,4 and 6
d)
1,4 and 5
| | Sanskriti Bajaj answered |
Answer: d
Explanation: Maximum overshoot, rise time and delay time are the major factor of the transient behaviour of the system and determines the transient characteristics.
Explanation: Maximum overshoot, rise time and delay time are the major factor of the transient behaviour of the system and determines the transient characteristics.
The forward path transfer function is given by G(s) = 2/s(s+3). Obtain an expression for unit step response of the system. - a)1+2e-t+e-2t
- b)1+e-t-2e-2t
- c)1-e-t+2e-2t
- d)1-2e-t+e+2t
Correct answer is option 'D'. Can you explain this answer?
The forward path transfer function is given by G(s) = 2/s(s+3). Obtain an expression for unit step response of the system.
a)
1+2e-t+e-2t
b)
1+e-t-2e-2t
c)
1-e-t+2e-2t
d)
1-2e-t+e+2t
| | Kunal Sharma answered |
Answer: d
Explanation: C(s)/R(s) = s/(s2+3s+2)
C(s) = 1/s-2/s+1+1/s+2
c(t) = 1-2e-t+e+2t.
Explanation: C(s)/R(s) = s/(s2+3s+2)
C(s) = 1/s-2/s+1+1/s+2
c(t) = 1-2e-t+e+2t.
The standard second order system to a unit step input shows the 0.36 as the first peak undershoot, hence its second overshoot is:- a)0.135
- b)0.216
- c)0.1296
- d)0.116
Correct answer is option 'B'. Can you explain this answer?
The standard second order system to a unit step input shows the 0.36 as the first peak undershoot, hence its second overshoot is:
a)
0.135
b)
0.216
c)
0.1296
d)
0.116
 | Rahul Chatterjee answered |
Overshoot and undershoot are calculated from the formula of peak time as odd peaks denote the overshoot and even denotes the under shoot.
Which one of the following is the most likely reason for large overshoot in a control system?- a)High gain in a system
- b)Presence of dead time delay in a system
- c)High positive correcting torque
- d)High retarding torque
Correct answer is option 'C'. Can you explain this answer?
Which one of the following is the most likely reason for large overshoot in a control system?
a)
High gain in a system
b)
Presence of dead time delay in a system
c)
High positive correcting torque
d)
High retarding torque
| | Ayush Kumar answered |
Answer: c
Explanation: Large overshoot refers to the maximum peak in the response of the closed loop system and this is mainly due to the high positive correcting torque.
Explanation: Large overshoot refers to the maximum peak in the response of the closed loop system and this is mainly due to the high positive correcting torque.
It is generally used to analyze the transient response to one of the standard test signals.- a)Ture
- b)False
Correct answer is option 'A'. Can you explain this answer?
It is generally used to analyze the transient response to one of the standard test signals.
a)
Ture
b)
False
| | Rahul Banerjee answered |
Answer: a
Explanation: For analyzing transient response mainly step is used and also other signals mainly ramp and parabolic are not used for this analysis but they are used for steady state analysis.
Explanation: For analyzing transient response mainly step is used and also other signals mainly ramp and parabolic are not used for this analysis but they are used for steady state analysis.
Consider the input with the inputs 4 u(t) and the impulse response 5 +7 , the time constants of the output are,- a)0.2, 0.33 and 0.5
- b)4.5 and 7
- c)0.2, 0.4 and 0.7
- d)0.2, 0.1 and 0.25
Correct answer is option 'A'. Can you explain this answer?
Consider the input with the inputs 4 u(t) and the impulse response 5 +7 , the time constants of the output are,
a)
0.2, 0.33 and 0.5
b)
4.5 and 7
c)
0.2, 0.4 and 0.7
d)
0.2, 0.1 and 0.25
 | Shivam Sharma answered |
Output response so calculated is the inverse Laplace transform of the input and impulse response and hence converting the resultant form in the time constant form time constant can be directly determined.CORRECT OPTION IS (A).
Laplace transform of unit impulse signal is :- a)A/s
- b)A
- c)1
- d)1/s
Correct answer is option 'C'. Can you explain this answer?
Laplace transform of unit impulse signal is :
a)
A/s
b)
A
c)
1
d)
1/s
| | Mahi Bose answered |
Answer: c
Explanation: Laplace response of impulse signal is one which implies Laplace response is systems response.
Explanation: Laplace response of impulse signal is one which implies Laplace response is systems response.
Find the initial and final values of the following function:F(s) = 12(s+1)/s(s+2)^2(s+3)- a)1,∞
- b)0,∞
- c)∞,1
- d)0,1
Correct answer is option 'D'. Can you explain this answer?
Find the initial and final values of the following function:
F(s) = 12(s+1)/s(s+2)^2(s+3)
a)
1,∞
b)
0,∞
c)
∞,1
d)
0,1
| | Ameya Nambiar answered |
Answer: d
Explanation: Using final and initial values theorem directly to find initial and final values but keeping in mind that final value theorem is applicable for stable systems only.
Explanation: Using final and initial values theorem directly to find initial and final values but keeping in mind that final value theorem is applicable for stable systems only.
Control system are normally designed to be:- a)Overdamped
- b)Under damped
- c)Un damped
- d)Critically damped
Correct answer is option 'B'. Can you explain this answer?
Control system are normally designed to be:
a)
Overdamped
b)
Under damped
c)
Un damped
d)
Critically damped
| | Ayush Kumar answered |
Answer: b
Explanation: Practically there are some non-linearity present in the system as friction but in mathematical model these are considered by considering high gain and lower damping.
Explanation: Practically there are some non-linearity present in the system as friction but in mathematical model these are considered by considering high gain and lower damping.
The peak percentage overshoot of the closed loop system is :- a)5.0%
- b)10.0%
- c)16.3%
- d)1.63%
Correct answer is option 'C'. Can you explain this answer?
The peak percentage overshoot of the closed loop system is :
a)
5.0%
b)
10.0%
c)
16.3%
d)
1.63%
| | Nitin Chawla answered |
Answer: c
Explanation: C(s)/R(s) = 1/s2+s+1
C(s)/R(s) = w/ws2+2Gws+w2
Compare both the equations,
w = 1 rad/sec
2Gw = 1
Mp = 16.3 %
Explanation: C(s)/R(s) = 1/s2+s+1
C(s)/R(s) = w/ws2+2Gws+w2
Compare both the equations,
w = 1 rad/sec
2Gw = 1
Mp = 16.3 %
To find system’s response by means of convolution integral ____________ of the system is used.- a)Sum
- b)Difference
- c)Exponential
- d)Weighing
Correct answer is option 'D'. Can you explain this answer?
To find system’s response by means of convolution integral ____________ of the system is used.
a)
Sum
b)
Difference
c)
Exponential
d)
Weighing
| | Sanskriti Desai answered |
Answer: d.
Explanation: Impulse response of a system is the inverse Laplace transfer function of its Laplace function.
Explanation: Impulse response of a system is the inverse Laplace transfer function of its Laplace function.
Consider a second order all-pole transfer function model, if the desired settling time(5%) is 0.60 sec and the desired damping ratio 0.707, where should the poles be located in s-plane?- a)-5+j4√2
- b)-5+j5
- c)-4+j5√2
- d)-4+j7
Correct answer is option 'B'. Can you explain this answer?
Consider a second order all-pole transfer function model, if the desired settling time(5%) is 0.60 sec and the desired damping ratio 0.707, where should the poles be located in s-plane?
a)
-5+j4√2
b)
-5+j5
c)
-4+j5√2
d)
-4+j7
| | Pankaj Mehta answered |
Answer: b
Explanation: G = 1/√2
Gw = 5
s = -5+j5.
Explanation: G = 1/√2
Gw = 5
s = -5+j5.
The unit step response of a second order system is = 1-e-5t-5te-5t . Consider the following statements:
1. The under damped natural frequency is 5 rad/s.
2. The damping ratio is 1.
3. The impulse response is 25te-5t.
Which of the statements given above are correct?- a)Only 1 and 2
- b)Only 2 and 3
- c)Only 1 and 3
- d)1,2 and 3
Correct answer is option 'D'. Can you explain this answer?
The unit step response of a second order system is = 1-e-5t-5te-5t . Consider the following statements:
1. The under damped natural frequency is 5 rad/s.
2. The damping ratio is 1.
3. The impulse response is 25te-5t.
Which of the statements given above are correct?
1. The under damped natural frequency is 5 rad/s.
2. The damping ratio is 1.
3. The impulse response is 25te-5t.
Which of the statements given above are correct?
a)
Only 1 and 2
b)
Only 2 and 3
c)
Only 1 and 3
d)
1,2 and 3
| | Prisha Sen answered |
Answer: d
Explanation: C(s) = 1/s-1/s+5-5/(s+5)^2
C(s) = 25/s(s2+10s+25)
R(s) = 1/s
G(s) = 25/(s2+10s+25 )
w= √25
w = 5 rad/sec
G = 1.
Explanation: C(s) = 1/s-1/s+5-5/(s+5)^2
C(s) = 25/s(s2+10s+25)
R(s) = 1/s
G(s) = 25/(s2+10s+25 )
w= √25
w = 5 rad/sec
G = 1.
A feedback control systems has the inherent capability that its parameter can be adjusted to alter both its transient and steady state responses.- a)True
- b)False
Correct answer is option 'A'. Can you explain this answer?
A feedback control systems has the inherent capability that its parameter can be adjusted to alter both its transient and steady state responses.
a)
True
b)
False
| | Isha Singh answered |
Answer: a
Explanation: Feedback’s inherent capability is that its parameter can be adjusted to alter both transient and steady state responses as together they are referred to as time responses.
Explanation: Feedback’s inherent capability is that its parameter can be adjusted to alter both transient and steady state responses as together they are referred to as time responses.
Consider a system with transfer function G(s) = s+6/Ks2+s+6. Its damping ratio will be 0.5 when the values of k is: - a)2/6
- b)3
- c)1/6
- d)6
Correct answer is option 'C'. Can you explain this answer?
Consider a system with transfer function G(s) = s+6/Ks2+s+6. Its damping ratio will be 0.5 when the values of k is:
a)
2/6
b)
3
c)
1/6
d)
6
| | Shivam Das answered |
Answer: c
Explanation: s+6/K[s2+s/K+6/K] Comparing with s2+2Gw+w2
w= √6/K
2Gw=1/K
2*0.5*√6/K =1/K
K=1/6.
Explanation: s+6/K[s2+s/K+6/K] Comparing with s2+2Gw+w2
w= √6/K
2Gw=1/K
2*0.5*√6/K =1/K
K=1/6.
Assertion (A): It is observed that step function is first derivative of a ramp function and impulse function is first derivative of a step function.
Reason (R): From the derived time response expression it is concluded that the output time response also follows the same sequence as that of input functions.- a)Both A and R are true and R is the correct explanation of A
- b)Both A and R are true but R is not correct explanation of A
- c)Both A is True but R is false
- d)Both A is False but R is true
Correct answer is option 'B'. Can you explain this answer?
Assertion (A): It is observed that step function is first derivative of a ramp function and impulse function is first derivative of a step function.
Reason (R): From the derived time response expression it is concluded that the output time response also follows the same sequence as that of input functions.
Reason (R): From the derived time response expression it is concluded that the output time response also follows the same sequence as that of input functions.
a)
Both A and R are true and R is the correct explanation of A
b)
Both A and R are true but R is not correct explanation of A
c)
Both A is True but R is false
d)
Both A is False but R is true
| | Aaditya Choudhary answered |
Answer: b
Explanation: If response due to one standard signal is known then response due to other signals can also be derived.
Explanation: If response due to one standard signal is known then response due to other signals can also be derived.
First order system is defined as :- a)Number of poles at origin
- b)Order of the differential equation
- c)Total number of poles of equation
- d)Total number of poles and order of equation
Correct answer is option 'D'. Can you explain this answer?
First order system is defined as :
a)
Number of poles at origin
b)
Order of the differential equation
c)
Total number of poles of equation
d)
Total number of poles and order of equation
| | Bibek Saha answered |
Answer: d
Explanation: First order system is defined by total number of poles and also which is same as the order of differential equation.
Explanation: First order system is defined by total number of poles and also which is same as the order of differential equation.
The input signals to control systems are not known fully ahead of time, the characteristics of control system which suddenly strain a control system are:- a)Sudden shock
- b)Sudden change
- c)Constant velocity and acceleration
- d)All of the mentioned
Correct answer is option 'D'. Can you explain this answer?
The input signals to control systems are not known fully ahead of time, the characteristics of control system which suddenly strain a control system are:
a)
Sudden shock
b)
Sudden change
c)
Constant velocity and acceleration
d)
All of the mentioned
| | Prisha Sengupta answered |
Answer: d
Explanation: System dynamic behavior for analysis and design is therefore judged and compared under standard test signals.
Explanation: System dynamic behavior for analysis and design is therefore judged and compared under standard test signals.
In a second order feedback control system natural frequency and damping- a)Can be designed by changing the gain of the individual system
- b)Cannot be designed by changing the gain of the individual system
- c)Are independent on the type of input excitation
- d)None of the mentioned
Correct answer is option 'A'. Can you explain this answer?
In a second order feedback control system natural frequency and damping
a)
Can be designed by changing the gain of the individual system
b)
Cannot be designed by changing the gain of the individual system
c)
Are independent on the type of input excitation
d)
None of the mentioned
| | Raghav Nambiar answered |
Answer: a
Explanation: Natural frequency and damping can be designed by changing the gain of the individual system.
Explanation: Natural frequency and damping can be designed by changing the gain of the individual system.
The damping ratio and peak overshoot are measures of:- a)Relative stability
- b)Speed of response
- c)Steady state error
- d)Absolute stability
Correct answer is option 'B'. Can you explain this answer?
The damping ratio and peak overshoot are measures of:
a)
Relative stability
b)
Speed of response
c)
Steady state error
d)
Absolute stability
| | Aman Jain answered |
Answer: b
Explanation: Speed of response is the speed at which the response takes the final value and this is determined by damping factor which reduces the oscillations and peak overshoot as the peak is less then the speed of response will be more.
Explanation: Speed of response is the speed at which the response takes the final value and this is determined by damping factor which reduces the oscillations and peak overshoot as the peak is less then the speed of response will be more.
Which of the following transfer function will have the greatest maximum overshoot? - a)9/(s2+2s+9)
- b)16/(s2+2s+16)
- c)25/(s2+2s+25)
- d)36/(s2+2s+36)
Correct answer is option 'D'. Can you explain this answer?
Which of the following transfer function will have the greatest maximum overshoot?
a)
9/(s2+2s+9)
b)
16/(s2+2s+16)
c)
25/(s2+2s+25)
d)
36/(s2+2s+36)
| | Disha Das answered |
Answer: d
Explanation: Comparing the characteristic equation with the standard equation the value of the damping factor is calculated and the value for the option d is minimum hence the system will have the maximum overshoot .
Explanation: Comparing the characteristic equation with the standard equation the value of the damping factor is calculated and the value for the option d is minimum hence the system will have the maximum overshoot .
Step signal is the signal whose values is :- a)1 for all values greater than zero
- b)Indeterminate at zero
- c)It is zero for time less than zero
- d)All of the mentioned
Correct answer is option 'D'. Can you explain this answer?
Step signal is the signal whose values is :
a)
1 for all values greater than zero
b)
Indeterminate at zero
c)
It is zero for time less than zero
d)
All of the mentioned
| | Saranya Mishra answered |
Answer: d
Explanation: Step signal is the signal whose value varies from zero to level in zero time.
Explanation: Step signal is the signal whose value varies from zero to level in zero time.
The peak percentage overshoot of the closed loop system is :- a)5.0%
- b)10.0%
- c)16.3%
- d)1.63%
Correct answer is option 'C'. Can you explain this answer?
The peak percentage overshoot of the closed loop system is :
a)
5.0%
b)
10.0%
c)
16.3%
d)
1.63%
| | Anjali Choudhury answered |
Answer: c
Explanation: C(s)/R(s) = 1/s2+s+1
C(s)/R(s) = w/ws2+2Gws+w2
Compare both the equations,
w = 1 rad/sec
2Gw = 1
Mp = 16.3 %
Explanation: C(s)/R(s) = 1/s2+s+1
C(s)/R(s) = w/ws2+2Gws+w2
Compare both the equations,
w = 1 rad/sec
2Gw = 1
Mp = 16.3 %
The characteristic equation of a control system is s(s2+ 6s+13)+K=0. The value of k such that the characteristic equation has a pair of complex roots with real part -1 will be : - a)10
- b)20
- c)30
- d)40
Correct answer is option 'B'. Can you explain this answer?
The characteristic equation of a control system is s(s2+ 6s+13)+K=0. The value of k such that the characteristic equation has a pair of complex roots with real part -1 will be :
a)
10
b)
20
c)
30
d)
40
| | Srishti Choudhary answered |
Answer: b
Explanation: The characteristic equation is considered and the values of G and w are calculated and further the value of k can be calculated.
Explanation: The characteristic equation is considered and the values of G and w are calculated and further the value of k can be calculated.
The loop transfer function of controller Gc(s) is :- a)1+0.1s/s
- b)-1+0.1s/s
- c)–s/s+1
- d)s/s+1
Correct answer is option 'A'. Can you explain this answer?
The loop transfer function of controller Gc(s) is :
a)
1+0.1s/s
b)
-1+0.1s/s
c)
–s/s+1
d)
s/s+1
| | Prasenjit Yadav answered |
Answer: a
Explanation: The transfer function of the controller is 0.1s+1/s
Gc(s) = 0.1s+1/s.
Explanation: The transfer function of the controller is 0.1s+1/s
Gc(s) = 0.1s+1/s.
The unit step response of a second order system is = 1-e-5t-5te-5t . Consider the following statements:
1. The under damped natural frequency is 5 rad/s.
2. The damping ratio is 1.
3. The impulse response is 25te-5t.
Which of the statements given above are correct?- a)Only 1 and 2
- b)Only 2 and 3
- c)Only 1 and 3
- d)1,2 and 3
Correct answer is option 'D'. Can you explain this answer?
The unit step response of a second order system is = 1-e-5t-5te-5t . Consider the following statements:
1. The under damped natural frequency is 5 rad/s.
2. The damping ratio is 1.
3. The impulse response is 25te-5t.
Which of the statements given above are correct?
1. The under damped natural frequency is 5 rad/s.
2. The damping ratio is 1.
3. The impulse response is 25te-5t.
Which of the statements given above are correct?
a)
Only 1 and 2
b)
Only 2 and 3
c)
Only 1 and 3
d)
1,2 and 3
| | Uday Saini answered |
Answer: d
Explanation: C(s) = 1/s-1/s+5-5/(s+5)^2
C(s) = 25/s(s2+10s+25)
R(s) = 1/s
G(s) = 25/(s2+10s+25 )
w= √25
w = 5 rad/sec
G = 1.
Explanation: C(s) = 1/s-1/s+5-5/(s+5)^2
C(s) = 25/s(s2+10s+25)
R(s) = 1/s
G(s) = 25/(s2+10s+25 )
w= √25
w = 5 rad/sec
G = 1.
The transfer function of a system is G(s) = 100/(s+1) (s+100). For a unit step input to the system the approximate settling time for 2% criterion is:- a)100 sec
- b)4 sec
- c)1 sec
- d)0.01 sec
Correct answer is option 'B'. Can you explain this answer?
The transfer function of a system is G(s) = 100/(s+1) (s+100). For a unit step input to the system the approximate settling time for 2% criterion is:
a)
100 sec
b)
4 sec
c)
1 sec
d)
0.01 sec
| | Rounak Rane answered |
Answer: b
Explanation: Comparing the equation with the characteristic equation and then finding the value of G and w and calculating the value of settling time as 4 sec from 4/Gw.
Explanation: Comparing the equation with the characteristic equation and then finding the value of G and w and calculating the value of settling time as 4 sec from 4/Gw.
The output in response to a unit step input for a particular continuous control system is c(t)= 1-e-t. What is the delay time Td?- a)0.36
- b)0.18
- c)0.693
- d)0.289
Correct answer is option 'C'. Can you explain this answer?
The output in response to a unit step input for a particular continuous control system is c(t)= 1-e-t. What is the delay time Td?
a)
0.36
b)
0.18
c)
0.693
d)
0.289
| | Jyoti Basak answered |
Answer: c
Explanation: The output is given as a function of time. The final value of the output is limn->∞c(t)=1; . Hence Td (at 50% of the final value) is the solution of 0.5=1-e-Td, and is equal to ln 2 or 0.693 sec.
Explanation: The output is given as a function of time. The final value of the output is limn->∞c(t)=1; . Hence Td (at 50% of the final value) is the solution of 0.5=1-e-Td, and is equal to ln 2 or 0.693 sec.
Transient response analysis is done for_________ systems.- a)Unstable
- b)Stable
- c)Conditionally stable
- d)Marginally stable
Correct answer is option 'B'. Can you explain this answer?
Transient response analysis is done for_________ systems.
a)
Unstable
b)
Stable
c)
Conditionally stable
d)
Marginally stable
 | Sagarika Patel answered |
Transient response analysis is the most general method for computing forced dynamic response. The purpose of a transient response analysis is to determine the behavior of a structure subjected to time-varying excitation. The transient excitation is explicitly defined in the time domain.
Consider a system with transfer function G(s) = s+6/Ks2+s+6. Its damping ratio will be 0.5 when the values of k is: - a)2/6
- b)3
- c)1/6
- d)6
Correct answer is option 'C'. Can you explain this answer?
Consider a system with transfer function G(s) = s+6/Ks2+s+6. Its damping ratio will be 0.5 when the values of k is:
a)
2/6
b)
3
c)
1/6
d)
6
| | Devansh Das answered |
Answer: c
Explanation: s+6/K[s2+s/K+6/K] Comparing with s2+2Gw+w2
w= √6/K
2Gw=1/K
2*0.5*√6/K =1/K
K=1/6.
Explanation: s+6/K[s2+s/K+6/K] Comparing with s2+2Gw+w2
w= √6/K
2Gw=1/K
2*0.5*√6/K =1/K
K=1/6.
Standard test signals in control system are:- a)Impulse signal
- b)Ramp signal
- c)Unit step signal
- d)All of the mentioned
Correct answer is option 'D'. Can you explain this answer?
Standard test signals in control system are:
a)
Impulse signal
b)
Ramp signal
c)
Unit step signal
d)
All of the mentioned
| | Hrishikesh Yadav answered |
Answer: d
Explanation: Standard test signals are impulse, ramp and unit step all of the above to test the dynamic behavior of the control system.
Explanation: Standard test signals are impulse, ramp and unit step all of the above to test the dynamic behavior of the control system.
Time response during steady state the output velocity matches with the input velocity but lags behind the input by T.- a)True
- b)False
Correct answer is option 'A'. Can you explain this answer?
Time response during steady state the output velocity matches with the input velocity but lags behind the input by T.
a)
True
b)
False
 | Prashanth Rane answered |
In first order systems the time response during steady state the output velocity matches.
Let c(t) be the unit step response of a system with transfer function K(s+a)/(s+K). If c(0+) = 2 and c(∞) = 10, then the values of a and K are respectively.- a)2 and 10
- b)-2 and 10
- c)10 and 2
- d)2 and -10
Correct answer is option 'C'. Can you explain this answer?
Let c(t) be the unit step response of a system with transfer function K(s+a)/(s+K). If c(0+) = 2 and c(∞) = 10, then the values of a and K are respectively.
a)
2 and 10
b)
-2 and 10
c)
10 and 2
d)
2 and -10
| | Ayush Kumar answered |
Answer: c
Explanation: Applying initial value theorem which state that the initial value of the system is at time t =0 and this is used to find the value of K and final value theorem to find the value of a.
Explanation: Applying initial value theorem which state that the initial value of the system is at time t =0 and this is used to find the value of K and final value theorem to find the value of a.
Ramp input :- a)Denotes constant velocity
- b)Value increases linearly with time
- c)It denotes constant velocity and varies linearly with time
- d)It varies exponentially with time
Correct answer is option 'C'. Can you explain this answer?
Ramp input :
a)
Denotes constant velocity
b)
Value increases linearly with time
c)
It denotes constant velocity and varies linearly with time
d)
It varies exponentially with time
| | Meghana Gupta answered |
Answer: c
Explanation: Ramp signal denotes constant velocity and also basic definition states that its value increases linearly with time.
Explanation: Ramp signal denotes constant velocity and also basic definition states that its value increases linearly with time.
A system with transfer function 1/Ts+1, subjected to a step input takes to seconds to reach 50% of step height. The value of t is :- a)6.9s
- b)10s
- c)14.4s
- d)20s
Correct answer is option 'C'. Can you explain this answer?
A system with transfer function 1/Ts+1, subjected to a step input takes to seconds to reach 50% of step height. The value of t is :
a)
6.9s
b)
10s
c)
14.4s
d)
20s
| | Parth Ghoshal answered |
Answer: c
Explanation: The response of a first order system is:
A(t)=a[1-e^-t/T] ½= 1-e^-10/t
T= 14.43 sec.
Explanation: The response of a first order system is:
A(t)=a[1-e^-t/T] ½= 1-e^-10/t
T= 14.43 sec.
Rise time, Peak time, maximum peak overshoot, settling time, and steady state error are mutually dependent.- a)True
- b)False
Correct answer is option 'A'. Can you explain this answer?
Rise time, Peak time, maximum peak overshoot, settling time, and steady state error are mutually dependent.
a)
True
b)
False
| | Debanshi Nair answered |
Answer: a
Explanation: Rise time, peak time, settling time and maximum peak overshoot are the prime factors of the time domain analysis and they must be specified in a consistent manner but they are mutually dependent.
Explanation: Rise time, peak time, settling time and maximum peak overshoot are the prime factors of the time domain analysis and they must be specified in a consistent manner but they are mutually dependent.
A unit step is applied at t=0 to a first order system without time delay. The response has the value of 1.264 units at t=10 mins, and 2 units at steady state. The transfer function of the system is_____________- a)3/(1+600s)
- b)2/(1+500s)
- c)5/(1+220s)
- d)2/(1+600s)
Correct answer is option 'D'. Can you explain this answer?
A unit step is applied at t=0 to a first order system without time delay. The response has the value of 1.264 units at t=10 mins, and 2 units at steady state. The transfer function of the system is_____________
a)
3/(1+600s)
b)
2/(1+500s)
c)
5/(1+220s)
d)
2/(1+600s)
| | Swati Tiwari answered |
Answer: d
Explanation: a(t)= k[1-e^-t/T] K=2
0.632= 1-e^-10/T
T=600 sec
G(s)=2/(1+600s).
Explanation: a(t)= k[1-e^-t/T] K=2
0.632= 1-e^-10/T
T=600 sec
G(s)=2/(1+600s).
A system has a complex conjugate root pair of multiplicity two or more in its characteristic equation. The impulse response of the system will be:- a)A sinusoidal oscillation which decays exponentially; the system is therefore stable
- b)A sinusoidal oscillation with a time multiplier ; the system is therefore unstable
- c)A sinusoidal oscillation which rises exponentially ; the system is therefore unstable
- d)A dc term harmonic oscillation the system therefore becomes limiting stable
Correct answer is option 'C'. Can you explain this answer?
A system has a complex conjugate root pair of multiplicity two or more in its characteristic equation. The impulse response of the system will be:
a)
A sinusoidal oscillation which decays exponentially; the system is therefore stable
b)
A sinusoidal oscillation with a time multiplier ; the system is therefore unstable
c)
A sinusoidal oscillation which rises exponentially ; the system is therefore unstable
d)
A dc term harmonic oscillation the system therefore becomes limiting stable
| | Vaibhav Mukherjee answered |
The impulse response of a system can provide valuable information about its behavior and stability. In this case, we are given that the system has a complex conjugate root pair of multiplicity two or more in its characteristic equation. Let's analyze the implications of this on the system's impulse response.
Complex Conjugate Root Pair
A complex conjugate root pair in the characteristic equation of a system indicates the presence of oscillatory behavior in the system's response. Complex conjugate roots are of the form a ± bi, where a and b are real numbers and i is the imaginary unit (√-1). These roots give rise to sinusoidal terms in the impulse response.
Multiplicity Two or More
The multiplicity of a root refers to the number of times it appears in the characteristic equation. When a complex conjugate root has a multiplicity of two or more, it means that it appears multiple times in the equation. This results in an exponential rise or decay in the sinusoidal terms of the impulse response.
Implications on the Impulse Response
Based on the given information, the impulse response of the system will exhibit the following characteristics:
1. Sinusoidal Oscillation: The presence of a complex conjugate root pair indicates the occurrence of sinusoidal terms in the impulse response. These sinusoids represent the oscillatory behavior of the system.
2. Exponential Rise: Since the complex conjugate root pair has a multiplicity of two or more, the sinusoidal terms in the impulse response will experience exponential rise. This means that the amplitude of the oscillation will increase over time.
3. Unstable System: An exponentially rising sinusoidal term indicates an unstable system. As the amplitude continuously grows, the system's response becomes unbounded and uncontrollable. This behavior is undesirable in most engineering applications.
Conclusion
In summary, a system with a complex conjugate root pair of multiplicity two or more in its characteristic equation will have an impulse response that exhibits a sinusoidal oscillation with exponential rise. This behavior indicates an unstable system, as the response grows without bound.
Complex Conjugate Root Pair
A complex conjugate root pair in the characteristic equation of a system indicates the presence of oscillatory behavior in the system's response. Complex conjugate roots are of the form a ± bi, where a and b are real numbers and i is the imaginary unit (√-1). These roots give rise to sinusoidal terms in the impulse response.
Multiplicity Two or More
The multiplicity of a root refers to the number of times it appears in the characteristic equation. When a complex conjugate root has a multiplicity of two or more, it means that it appears multiple times in the equation. This results in an exponential rise or decay in the sinusoidal terms of the impulse response.
Implications on the Impulse Response
Based on the given information, the impulse response of the system will exhibit the following characteristics:
1. Sinusoidal Oscillation: The presence of a complex conjugate root pair indicates the occurrence of sinusoidal terms in the impulse response. These sinusoids represent the oscillatory behavior of the system.
2. Exponential Rise: Since the complex conjugate root pair has a multiplicity of two or more, the sinusoidal terms in the impulse response will experience exponential rise. This means that the amplitude of the oscillation will increase over time.
3. Unstable System: An exponentially rising sinusoidal term indicates an unstable system. As the amplitude continuously grows, the system's response becomes unbounded and uncontrollable. This behavior is undesirable in most engineering applications.
Conclusion
In summary, a system with a complex conjugate root pair of multiplicity two or more in its characteristic equation will have an impulse response that exhibits a sinusoidal oscillation with exponential rise. This behavior indicates an unstable system, as the response grows without bound.
Normalized response of a dynamic system refers to:- a)Characteristic feature of a response due to specific excitation irrespective of its amplitude
- b)Response of dynamic system divided by its maximum value
- c)Response of dynamic system divided by a standard value
- d)None of the mentioned
Correct answer is option 'A'. Can you explain this answer?
Normalized response of a dynamic system refers to:
a)
Characteristic feature of a response due to specific excitation irrespective of its amplitude
b)
Response of dynamic system divided by its maximum value
c)
Response of dynamic system divided by a standard value
d)
None of the mentioned
| | Divya Nair answered |
Normalization refers to the desired to the reference value and normalized response of the dynamic system refers to the characteristic feature of a response due to specific excitation irrespective of its amplitude.
Undamped natural frequency of a second order system has the following influence on the response due to various excitations:- a)Increase in speed of response and decrease sensitivity
- b)Decrease in speed of response and increase sensitivity
- c)Has no influence in the dynamic response
- d)Increase oscillatory behavior
Correct answer is option 'A'. Can you explain this answer?
Undamped natural frequency of a second order system has the following influence on the response due to various excitations:
a)
Increase in speed of response and decrease sensitivity
b)
Decrease in speed of response and increase sensitivity
c)
Has no influence in the dynamic response
d)
Increase oscillatory behavior
| | Yashvi Shah answered |
Answer: a
Explanation: Undamped natural frequency is the frequency that has suffered damping and gets affected by the increase in the speed of response and decrease in sensitivity.
Explanation: Undamped natural frequency is the frequency that has suffered damping and gets affected by the increase in the speed of response and decrease in sensitivity.
The output in response to a unit step input for a particular continuous control system is c(t)= 1-e-t. What is the delay time Td? - a)0.36
- b)0.18
- c)0.693
- d)0.289
Correct answer is option 'C'. Can you explain this answer?
The output in response to a unit step input for a particular continuous control system is c(t)= 1-e-t. What is the delay time Td?
a)
0.36
b)
0.18
c)
0.693
d)
0.289
| | Anirban Gupta answered |
Answer: c
Explanation: The output is given as a function of time. The final value of the output is limn->∞c(t)=1; . Hence Td (at 50% of the final value) is the solution of 0.5=1-e-Td, and is equal to ln 2 or 0.693 sec.
Explanation: The output is given as a function of time. The final value of the output is limn->∞c(t)=1; . Hence Td (at 50% of the final value) is the solution of 0.5=1-e-Td, and is equal to ln 2 or 0.693 sec.
The system in originally critically damped if the gain is doubled the system will be :- a)Remains same
- b)Overdamped
- c)Under damped
- d)Undamped
Correct answer is option 'C'. Can you explain this answer?
The system in originally critically damped if the gain is doubled the system will be :
a)
Remains same
b)
Overdamped
c)
Under damped
d)
Undamped
| | Mansi Choudhury answered |
Answer: c
Explanation:
Explanation:

hence due to this G lies between 0 and 1.
For the system 2/s+1, the approximate time taken for a step response to reach 98% of its final value is: - a)1s
- b)2s
- c)4s
- d)8s
Correct answer is option 'C'. Can you explain this answer?
For the system 2/s+1, the approximate time taken for a step response to reach 98% of its final value is:
a)
1s
b)
2s
c)
4s
d)
8s
| | Prisha Sen answered |
Answer: c
Explanation: C(s)/R(s) = 2/s+1
R(s) = 1/s (step input)
C(s) = 2/s(s+1)
c(t) = 2[1-e-t] 1.96 = 2[1-e-T] T= 4sec.
Explanation: C(s)/R(s) = 2/s+1
R(s) = 1/s (step input)
C(s) = 2/s(s+1)
c(t) = 2[1-e-t] 1.96 = 2[1-e-T] T= 4sec.
For the system 2/s+1, the approximate time taken for a step response to reach 98% of its final value is: - a)1s
- b)2s
- c)4s
- d)8s
Correct answer is option 'C'. Can you explain this answer?
For the system 2/s+1, the approximate time taken for a step response to reach 98% of its final value is:
a)
1s
b)
2s
c)
4s
d)
8s
| | Muskaan Nair answered |
Answer: c
Explanation: C(s)/R(s) = 2/s+1
R(s) = 1/s (step input)
C(s) = 2/s(s+1)
c(t) = 2[1-e-t] 1.96 = 2[1-e-T] T= 4sec.
Explanation: C(s)/R(s) = 2/s+1
R(s) = 1/s (step input)
C(s) = 2/s(s+1)
c(t) = 2[1-e-t] 1.96 = 2[1-e-T] T= 4sec.
Chapter doubts & questions for Time response of discrete systems - 3 Months Preparation for GATE Electrical 2026 is part of Electrical Engineering (EE) exam preparation. The chapters have been prepared according to the Electrical Engineering (EE) exam syllabus. The Chapter doubts & questions, notes, tests & MCQs are made for Electrical Engineering (EE) 2026 Exam. Find important definitions, questions, notes, meanings, examples, exercises, MCQs and online tests here.
Chapter doubts & questions of Time response of discrete systems - 3 Months Preparation for GATE Electrical in English & Hindi are available as part of Electrical Engineering (EE) exam. Download more important topics, notes, lectures and mock test series for Electrical Engineering (EE) Exam by signing up for free.
3 Months Preparation for GATE Electrical676 videos|1399 docs|882 tests |