Past Year Questions: Cams And Follower - Mechanical Engineering MCQ
6 Questions MCQ Test - Past Year Questions: Cams And Follower

In a cam-follower mechanism, the follower needs to rise through 20 mm during 60° of cam rotation, the first 30° with a constant acceleration and then with a deceleration of the same magnitude. The initial and final speeds of the follower are zero. The cam rotates at uniform speed of 300 rpm. The maximum speed of the follower is
[2005]

In the mechanism given below, if the angular velocity of the eccentric circular disc is 1 rad/s, the angular velocity (rad/s) of the follower link for the instant shown in the figure is [Note : All dimensions are in mm.]
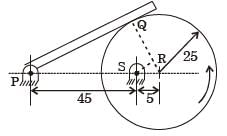
[2012]
 ...(1)
...(1)


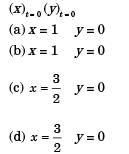
Consider a rotating disk cam and a translating roller follower with zero offset. Which one of the following pitch curves, parameterized by t, lying in the interval 0 to 2π, is associated with the maximum translation of the follower during one full rotation of the cam rotating about the center at (x, y) = (0, 0)?
[2014]
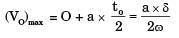
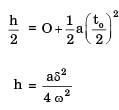
In a cam-follower, the follower rises by h as the cam rotates by d (radians) at constant angular velocity w (radians/s). The follower is uniformly accelerating during the first half of the rise period and it is uniformly decelerating in the later half of the rise period. Assuming that the magnitudes of the acceleration and deceleration are same, the maximum velocity of the follower is
[2018]
 ...(1)
...(1)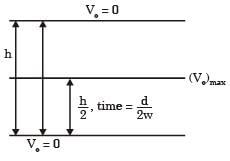
 ...(2)
...(2)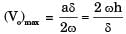
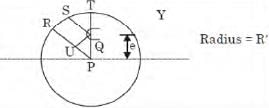
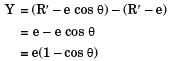
A flat -faced follower is driven using a circular eccentric can rotating at a constant angular velocity ω. At time t = 0, the vertical position of the follower is y(0) = 0, and the system is in the configuration shown below.
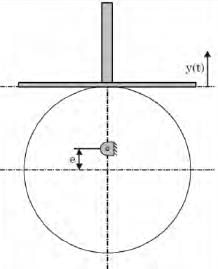
The vertical position of the follower face, y(t) is given by
[2019]

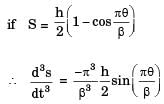
In a cam design, the rise motion is given by a Simple Harmonic Motion (SHM) 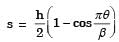 where h is total rise, θ is camshaft angle, β is the total angle of the rise interval. The jerk is given by
where h is total rise, θ is camshaft angle, β is the total angle of the rise interval. The jerk is given by
[2008]





Important Questions for Past Year Questions: Cams And Follower
Past Year Questions: Cams And Follower MCQs with Answers
Online Tests for Past Year Questions: Cams And Follower
|
© EduRev
|
Education Revolution
|



|









