Test: Automatic Control Systems - 5 - Electrical Engineering (EE) MCQ
25 Questions MCQ Test - Test: Automatic Control Systems - 5

Examine the following statements
- Air and gases are compressible.
- Air, gases and some liquids are compressible.
- Oil can function as hydraulic fluid as well as lubricator.
Which of the above statements are correct?
Which control action is also called rate control?

The signal flow graph of a system is shown in the given figure. The effect of disturbance TD can be reduced by
For overdamped systems a quadratic factor in transfer function can be replaced by two first order factors with real poles
A motor is coupled to a load through gear ratio n. If T is the motor torque, Jm and JL are moment of inertia of rotor and load, then torque to inertia ratio referred to motor shaft is
Accurate amplitude measurements can be made more easily than accurate phase shift measurements.
The transfer function of transportation lag is
In the given figure the input frequency f = 0.1 (1/2 p RC)
 .
.Assertion (A): The part of root locus on the real axis is not dependent on the poles and zeros which are not on the real axis.
Reason (R): Poles and zeros which are not on the real axis occur in conjugate pairs
In Bode diagram (log magnitude plot) of the factor 1/(1 + jωT) in the transfer function the log magnitude for ω << 1/T can be approximated by
For underdamped second order systems the rise time is the time required for the response to rise from
The phase angle of  is constant and equal to - 90º for all values of ω
is constant and equal to - 90º for all values of ω
The open loop frequency response of a unity feed back system is as under
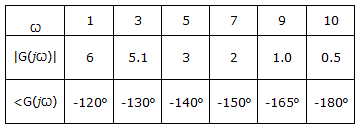
The gain margin and phase margin respectively are
Assertion (A): A large negative feedback is deliberately introduced in an amplifier to make its gain independent of variation in parameters of active device.
Reason (R): A large negative value of feedback results in a high value of return difference compared to unity which makes the feedback gain inversely proportional to the feedback factor.
 .
. can be for
can be for and
and  is more than
is more than  .
.An electromechanical device which actuates a train of step angular movements in response to a train of input pulses on one to one basis is
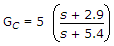
In response to a unit step input the controller output in given figure is for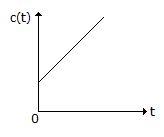
 then f(t) =
then f(t) =When time constant T in any factor is varied, the shapes of log magnitude and phase angle curves remain the same.
Which of the following is not correct for two phase servomotor?
 is small or R is high.
is small or R is high.Given figure shows the magnitude plot for a system. The steady state error for unit step input is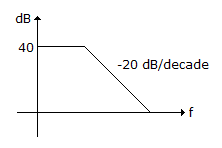
Important Questions for Automatic Control Systems - 5
Automatic Control Systems - 5 MCQs with Answers
Online Tests for Automatic Control Systems - 5
|
© EduRev
|
Education Revolution
|



|









within 7 days!