Test: Differential Equations Of Physical Systems And Dynamics Of Robotic Mechanisms - Electrical Engineering (EE) MCQ
15 Questions MCQ Test - Test: Differential Equations Of Physical Systems And Dynamics Of Robotic Mechanisms

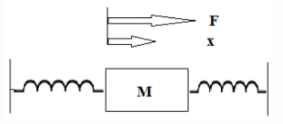
Consider a simple mass spring friction system as given in the figure K1, K2 are spring constants f-friction, M-Mass, F-Force, x-Displacement. The transfer function X(s)/F(s) of the given system will be :
The output of an first order hold between two consecutive sampling instants is:

Which of the following is an example of an open loop system?
A tachometer is added to servomechanism because:
A synchro Transmitter is used with control transformer for:
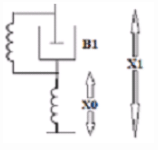
The below figure represents:
Backlash in a stable control system may cause:
Tachometer feedback in a D.C. position control system enhances stability?
For a tachometer, if a(t) is the rotor displacement, e(t) is the output voltage and K is the tachometer constant, then the transfer function is given by:
Gear train in the motor is used to reduce the gear ratio?
Assertion (A): Servomotors have heavier rotors and lower R/X ratio as compared to ordinary motors of similar ratings.
Reason (R): Servomotor should have smaller electrical and mechanical time constants for faster response.
Assertion (A): DC servomotors are more commonly used in armature controlled mode than field controlled mode.
Reason (R): Armature controlled Dc motors have higher starting torque than fiels controlled motors.
In case of DC servomotor, the back emf is equivalent to an “electric friction” which tends to:
The lagrangian is defined as:
A gantry robot consists of a manipulator mounted on an overhead system that allows movement only in ________ plane.
Important Questions for Differential Equations Of Physical Systems And Dynamics Of Robotic Mechanisms
Differential Equations Of Physical Systems And Dynamics Of Robotic Mechanisms MCQs with Answers
Online Tests for Differential Equations Of Physical Systems And Dynamics Of Robotic Mechanisms
|
© EduRev
|
Education Revolution
|



|








