Electrical Engineering (EE) Exam > Electrical Engineering (EE) Tests > Control Systems > Test: Introduction to Control Systems- 2 - Electrical Engineering (EE) MCQ
Test: Introduction to Control Systems- 2 - Electrical Engineering (EE) MCQ
Test Description
10 Questions MCQ Test Control Systems - Test: Introduction to Control Systems- 2
Test: Introduction to Control Systems- 2 for Electrical Engineering (EE) 2025 is part of Control Systems preparation. The Test: Introduction to Control Systems- 2 questions and answers have been
prepared according to the Electrical Engineering (EE) exam syllabus.The Test: Introduction to Control Systems- 2 MCQs are made for Electrical Engineering (EE) 2025 Exam. Find important
definitions, questions, notes, meanings, examples, exercises, MCQs and online tests for Test: Introduction to Control Systems- 2 below.
Solutions of Test: Introduction to Control Systems- 2 questions in English are available as part of our Control Systems for Electrical Engineering (EE) & Test: Introduction to Control Systems- 2 solutions in
Hindi for Control Systems course. Download more important topics, notes, lectures and mock
test series for Electrical Engineering (EE) Exam by signing up for free. Attempt Test: Introduction to Control Systems- 2 | 10 questions in 30 minutes | Mock test for Electrical Engineering (EE) preparation | Free important questions MCQ to study Control Systems for Electrical Engineering (EE) Exam | Download free PDF with solutions
Test: Introduction to Control Systems- 2 - Question 1

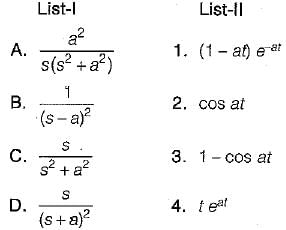
Match List- I (Laplace transforms) with List - II (Time functions) and select the correct answer using the codes aiven below the lists:
Codes:
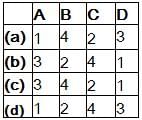
Codes:
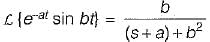
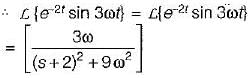
Detailed Solution for Test: Introduction to Control Systems- 2 - Question 1
Test: Introduction to Control Systems- 2 - Question 2
A standard signal used for comparison in a closed-loop control system is called the
Detailed Solution for Test: Introduction to Control Systems- 2 - Question 2

Test: Introduction to Control Systems- 2 - Question 3
The difference between the output response and the reference signal is known as the _____ signal.
Detailed Solution for Test: Introduction to Control Systems- 2 - Question 3
Test: Introduction to Control Systems- 2 - Question 4
The Laplace transform of unity function is
Detailed Solution for Test: Introduction to Control Systems- 2 - Question 4

Test: Introduction to Control Systems- 2 - Question 5
The phenomena of ‘limit cycles’ and ‘jump resonance’ are observed in
Detailed Solution for Test: Introduction to Control Systems- 2 - Question 5
Detailed Solution for Test: Introduction to Control Systems- 2 - Question 6
Test: Introduction to Control Systems- 2 - Question 7
A control system is said to be robust when
Detailed Solution for Test: Introduction to Control Systems- 2 - Question 7
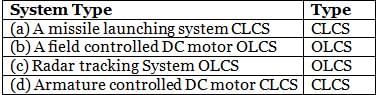
Test: Introduction to Control Systems- 2 - Question 8
Which of the following is not correctly matched?
(CLCS = Closed Loop Control System and OLCS = Open Loop Control System)
Detailed Solution for Test: Introduction to Control Systems- 2 - Question 8
Test: Introduction to Control Systems- 2 - Question 9
Which of the following is not true regarding an open loop control system?
Detailed Solution for Test: Introduction to Control Systems- 2 - Question 9
Test: Introduction to Control Systems- 2 - Question 10
As compared to a closed loop system, an open loop system is
Detailed Solution for Test: Introduction to Control Systems- 2 - Question 10
|
54 videos|83 docs|40 tests
|
Information about Test: Introduction to Control Systems- 2 Page
In this test you can find the Exam questions for Test: Introduction to Control Systems- 2 solved & explained in the simplest way possible.
Besides giving Questions and answers for Test: Introduction to Control Systems- 2, EduRev gives you an ample number of Online tests for practice




Important Questions for Introduction to Control Systems- 2
Find all the important questions for Introduction to Control Systems- 2 at EduRev.Get fully prepared for Introduction to Control Systems- 2 with EduRev's comprehensive question bank and test resources.
Our platform offers a diverse range of question papers covering various topics within the Introduction to Control Systems- 2 syllabus.
Whether you need to review specific subjects or assess your overall readiness, EduRev has you covered.
The questions are designed to challenge you and help you gain confidence in tackling the actual exam.
Maximize your chances of success by utilizing EduRev's extensive collection of Introduction to Control Systems- 2 resources.
Introduction to Control Systems- 2 MCQs with Answers
Prepare for the Introduction to Control Systems- 2 within the Electrical Engineering (EE) exam with comprehensive MCQs and answers at EduRev.
Our platform offers a wide range of practice papers, question papers, and mock tests to familiarize you with the exam pattern and syllabus.
Access the best books, study materials, and notes curated by toppers to enhance your preparation.
Stay updated with the exam date and receive expert preparation tips and paper analysis.
Visit EduRev's official website today and access a wealth of videos and coaching resources to excel in your exam.
Online Tests for Introduction to Control Systems- 2 Control Systems
Practice with a wide array of question papers that follow the exam pattern and syllabus.
Our platform offers a user-friendly interface, allowing you to track your progress and identify areas for improvement.
Access detailed solutions and explanations for each test to enhance your understanding of concepts.
With EduRev's Online Tests, you can build confidence, boost your performance, and ace Introduction to Control Systems- 2 with ease.
Join thousands of successful students who have benefited from our trusted online resources.
|
© EduRev
|
Education Revolution
|



|









Signup to see your scores
go up within 7 days!
Access 1000+ FREE Docs, Videos and Tests
Takes less than 10 seconds to signup