Test: Process Synchronization- 2 - Computer Science Engineering (CSE) MCQ
20 Questions MCQ Test Operating System - Test: Process Synchronization- 2

What is the name of the operating system that reads and reacts in terms of actual time.
Which of the following need not necessarily be saved on a Context Switch between processes?
| 1 Crore+ students have signed up on EduRev. Have you? Download the App |
Round Robin schedule is essentially the pre-emptive version of
Consider a set of n tasks with known runtimes r1, r2....rn to be run on a uniprocessor machine. Which of the following processor scheduling algorithms will result in the maximum throughput?
In an operating system, indivisibility of operation means:
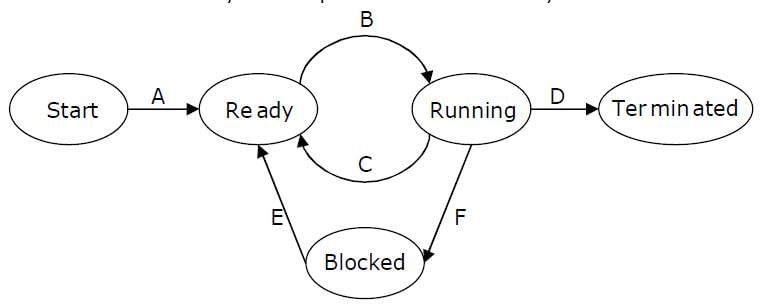
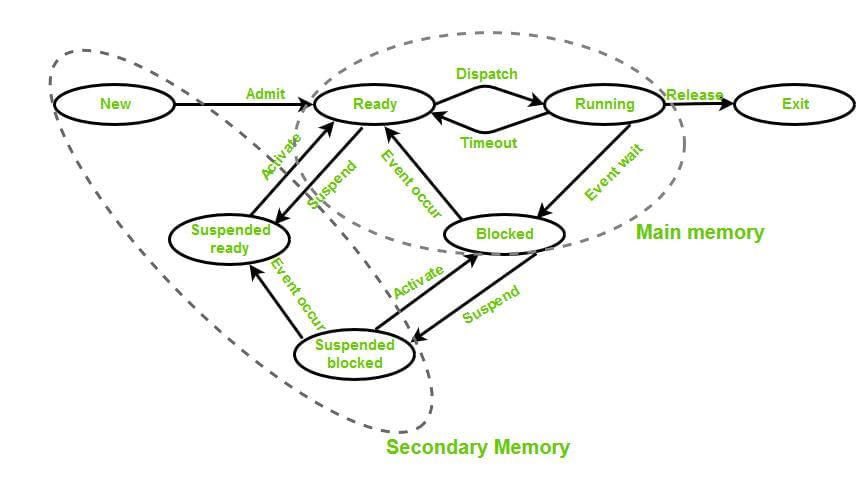
Which is the correct definition of a valid process transition in an operating system?
The performance of Round Robin algorithm depends heavily on
Four jobs to be executed on a single processor system arrive at time 0 in the order A, B, C, D . Their burst CPU time requirements are 4, 1, 8, 1 time units respectively. The completion time of A under round robin scheduling with time slice of one time unit is
There are three processes in the ready queue. When the currently running process requests for I/O how many process switches take place?
Two processes X and Y need to access a critical section. Consider the following synchronization construct used by both the processes.
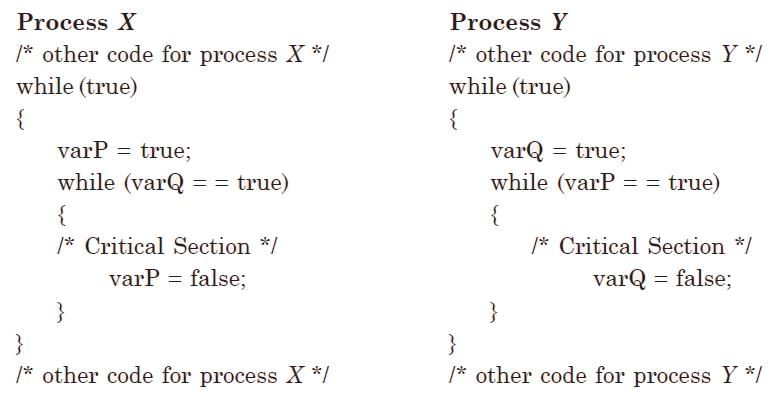
Here, varP and varQ are shared variables and both are initialized to false. Which one of the following statements is true?
In a certain operating system, deadlock prevention is attempted using the following scheme. Each process is assigned a unique timestamp, and is restarted with the same timestamp if killed. Let Ph be the process holding a resource R, Pr be a process requesting for the same resource R, and T(Ph) and T(Pr) be their timestamps respectively. The decision to wait or preempt one of the processes is based on the following algorithm.
if T(Pr) < T(Ph)
then kill Pr
else wait
Which one of the following is TRUE?
Suppose we want to synchronize two concurrent processes P and Q using binary semaphores S and T. The code for the processes P and Q is shown below.
Process P:
while (1) {
W:
print '0';
print '0';
X:
}
Process Q:
while (1) {
Y:
print '1';
print '1';
Z:
}
Synchronization statements can be inserted only at points W, X, Y and Z. Which of the following will always lead to an output staring with '001100110011' ?
Which of the following does not interrupt a running process?
What is the name of the technique in which the operating system of a computer executes several programs concurrently by switching back and forth between them?
Consider the following statements about process state transitions for a system using preemptive scheduling.
I. A running process can move to ready state.
II. A ready process can move to running state.
III. A blocked process can move to running state.
IV. A blocked process can move to ready state.
Which of the above statements are TRUE ?
Consider the methods used by processes P1 and P2 for accessing their critical sections whenever needed, as given below. The initial values of shared boolean variables S1 and S2 are randomly assigned.
Method Used by P1
while (S1 == S2) ;
Critica1 Section
S1 = S2;
Method Used by P2
while (S1 != S2) ;
Critica1 Section
S2 = not (S1);
Which one of the following statements describes the properties achieved?
|
10 videos|99 docs|33 tests
|
|
10 videos|99 docs|33 tests
|
Top Courses for Computer Science Engineering (CSE)




Important Questions for Process Synchronization- 2
Process Synchronization- 2 MCQs with Answers
Online Tests for Process Synchronization- 2 Operating System
|
© EduRev
|
Education Revolution
|



|







