Test: Control System- 2 - Electrical Engineering (EE) MCQ
20 Questions MCQ Test - Test: Control System- 2

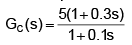
With the value of "a" set for phase margin of π/4, the value of unit impulse response of the open loop system at t = 1 second is equal to
The transfer function of a second order system is given as  The peak (A) value of the output for unit step input is
The peak (A) value of the output for unit step input is
The peak (A) value of the output for unit step input is


If the resonant peak of the system is B, then the value of B/A is
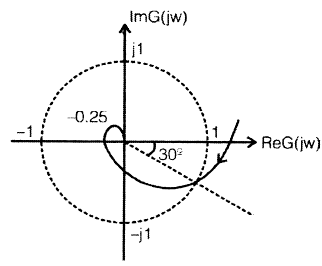
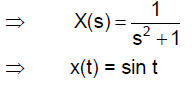
A portion of the polar plot of an open-loop transfer function is shown in the given figure
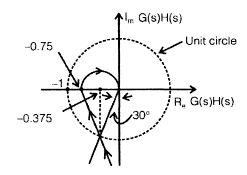
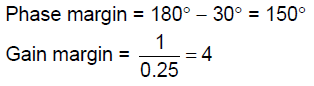
The phase margin and gain margin will be respectively
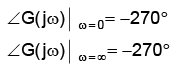
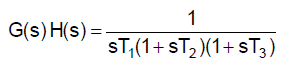
The open-loop transfer function of a unity negative feedback system is
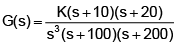
The polar plot of the system will be
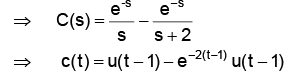
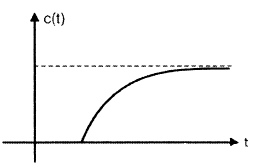
A step input is applied to a system with the transfer function
The output response will be

Which one of the following characteristic equations of result in the stable operation of the feedback system?
Consider the following statements:
Routh-Hurwitz criterion gives
1. absolute stability
2. the number of roots lying on the right half of the s-plane
3. the gain margin and phase margin
Which of these statements are correct?
Which of these statements are correct?
The polar plot (for positive frequencies) for the open-loop transfer function of a unity feedback control system is shown in the given figure
The phase margin and the gain margin ofthe system are respectively
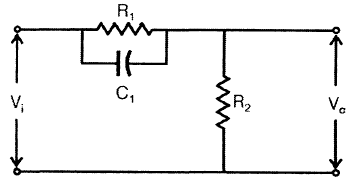
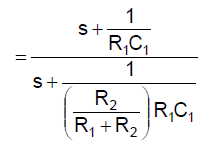
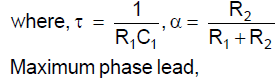
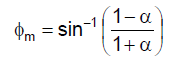
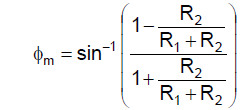
For the given network, the maximum phase lead φm of V0 with respect to Vi is

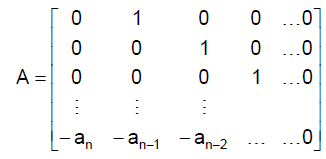
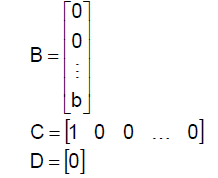
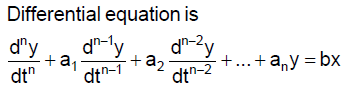
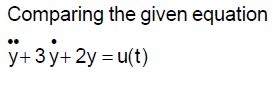
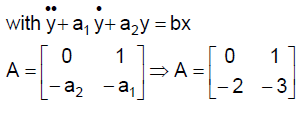
For the system dynamics described by differential equationy+3y+2y=u(t) the transfer function of the system represented in controllable canonical form is 
The matrix A would be
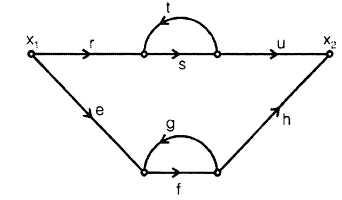
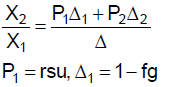
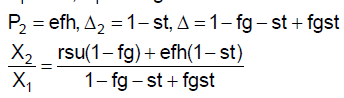
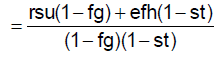
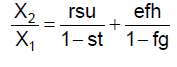
For the signal flow diagram shown in the given figure, the transmittance between x2 and x1 is
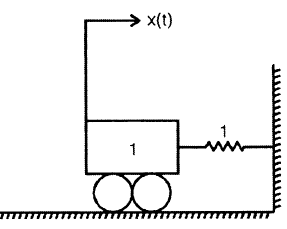
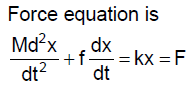
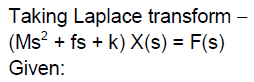
Consider the mechanical system shown in the given figure. If the system is set into motion by unit impulse force, the equation of the resulting oscillation will be

An open loop transfer function of a unity feedback control system has two finite zeros, two poles at origin and two pairs of complex conjugate poles. The slope of high frequency asymptote in Bode magnitude plot will be
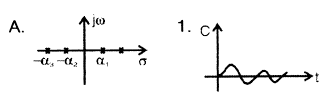
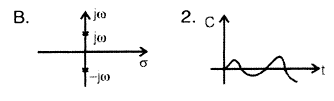
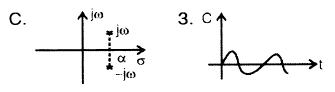
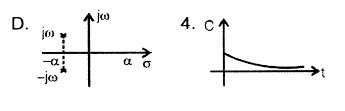
Match List-I (Pole-zero plot of linear control system) with
List-II (Responses of the system) and select the correct answer:
Codes:
Codes:
A B C D
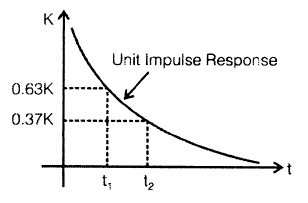
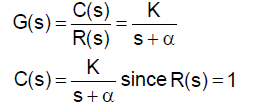
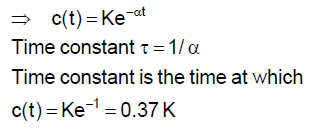
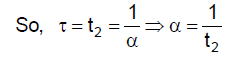
The unit impulse response of a system having transfer function K/(s + α) is shown below. The value of α is
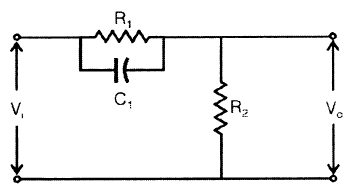
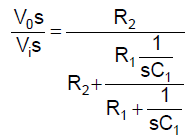
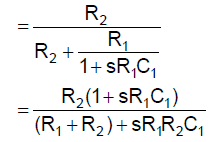
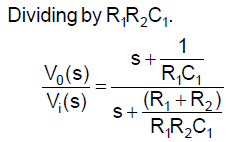
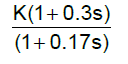
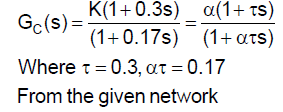
The transfer function of a phase lead network as shown in the figure below is
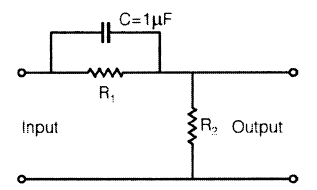
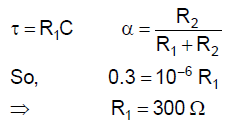
The values of R1 and R2 are respectively
The forward path transfer function of a unity feedback system is given by
The frequency response of this system will exhibit the resonance peak at





Important Questions for Control System- 2
Control System- 2 MCQs with Answers
Online Tests for Control System- 2
|
© EduRev
|
Education Revolution
|



|








