Test: Design of Control Systems - Electronics and Communication Engineering (ECE) MCQ
20 Questions MCQ Test - Test: Design of Control Systems

If stability error for step input and speed of responsebe the criteria for design, the suitable controller will be

 represent a
represent aA lag compensation network
(a) increases the gain of the original network without affecting stability.
(b) reduces the steady state error.
(c) reduces the speed of response
(d) permits the increase of gain of phase margin is acceptable.
In the above statements, which are correct
Consider the List I and List II
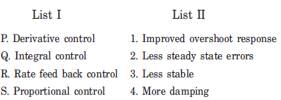
The correct match is

A control system in which the control action is somehow dependent on the output is known as
The transfer function of a compensating network is of form (1 + αTs)/(1 + Ts). If this is a phase–Lag network, the value of α should be
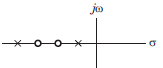
The poll–zero configuration of a phase–lead compensator is given by
While designing controller, the advantage of pole–zero cancellation is
The transfer function of a phase compensator is given by (1 + αTs) /(1 + Ts) where α > 1 and T > 0. The maximum phase shift provided by a such compensator is
For an electrically heated temperature controlled liquid heater, the best controller is
When phase-lag compensation is used in a system, gain crossover frequency, band width and undamped frequency are respectively :
A process with open–loop model
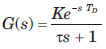
is controlled by a PID controller. For this purpose
(A) the derivative mode improves transient performance
(B) the derivative mode improves steady state performance
(C) the integral mode improves transient performance
(D) the integral mode improves steady state performance.
The correct statements are
A lead compensating network
(a) improves response time
(b) stabilizes the system with low phase margin
(c) enables moderate increase in gain without affecting stability.
(d) increases resonant frequency
In the above statements, correct are
A Lag network for compensation normally consists of
The correct sequence of steps needed to improve system stability is




Important Questions for Design of Control Systems
Design of Control Systems MCQs with Answers
Online Tests for Design of Control Systems
|
© EduRev
|
Education Revolution
|



|








