











Class 11 Exam > Class 11 Questions > Derivation of simple pendulum in SHM?
Start Learning for Free

Derivation of simple pendulum in SHM?

Most Upvoted Answer
Derivation of simple pendulum in SHM?
**Derivation of Simple Pendulum in SHM**
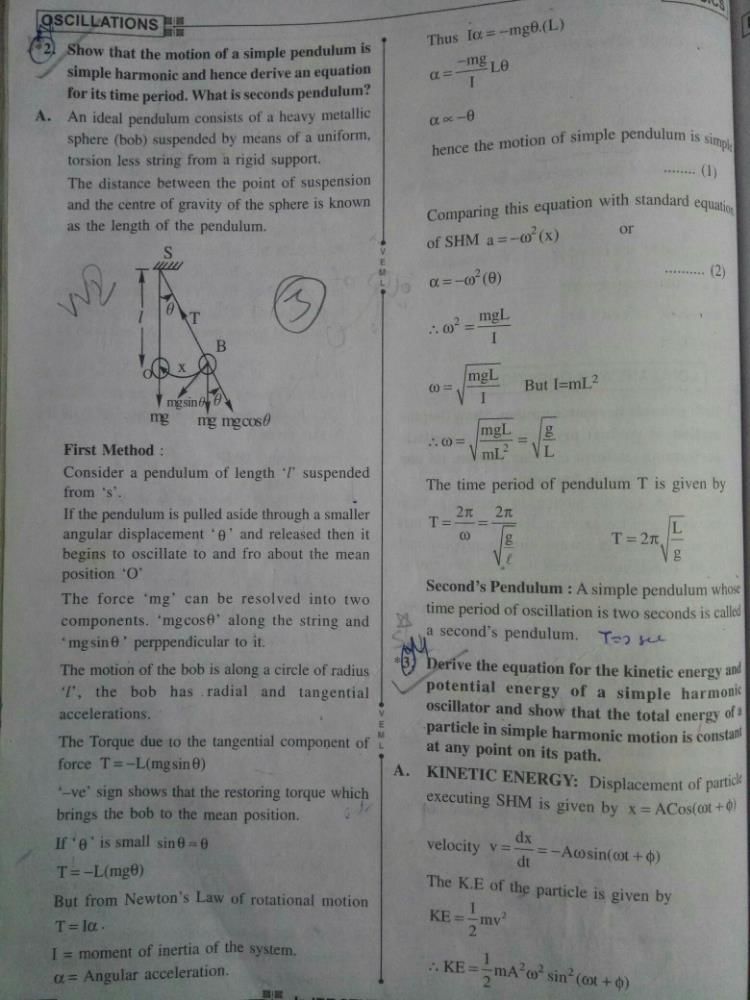
A simple pendulum consists of a mass (bob) attached to a string or rod of negligible mass and fixed at a pivot point. When the pendulum is displaced from its equilibrium position and released, it oscillates back and forth. The motion of a simple pendulum can be described by Simple Harmonic Motion (SHM). Let's derive the equation of motion for a simple pendulum in SHM.
**Assumptions:**
1. The string or rod is massless and inextensible.
2. The angle of displacement is small, so we can use the small-angle approximation.
**Derivation:**
1. **Defining Variables:**
- Let 'm' be the mass of the bob.
- Let 'L' be the length of the string or rod.
- Let 'θ' be the angular displacement of the pendulum from the vertical equilibrium position.
- Let 'g' be the acceleration due to gravity.
2. **Forces Acting on the Pendulum:**
- The weight of the bob acts vertically downwards and can be decomposed into two components: mg sin(θ) along the radial direction and mg cos(θ) along the tangential direction.
- The tension in the string or rod acts along the tangential direction towards the pivot point.
- The net force acting on the bob is the sum of the tangential components: T - mg cos(θ), where 'T' is the tension in the string or rod.
3. **Angular Acceleration:**
- The torque acting on the bob is given by the product of the force and the perpendicular distance from the pivot point, which is 'L' in this case.
- The torque can be written as: τ = (T - mg cos(θ)) * L.
- According to Newton's second law for rotational motion, τ = Iα, where 'I' is the moment of inertia and 'α' is the angular acceleration.
- For a simple pendulum, the moment of inertia is given by I = mL².
- Substituting the values, we get: (T - mg cos(θ)) * L = mL² * α.
4. **Restoring Force and SHM:**
- The restoring force is the component of the net force that acts towards the equilibrium position.
- The restoring force can be written as: F = -mg sin(θ).
- Using the small-angle approximation sin(θ) ≈ θ for small θ, we have F ≈ -mgθ.
- From the equation of angular acceleration, we can substitute τ = Iα as L * F = mL² * α.
- Simplifying the equation, we get: -mgθ = mL² * α.
5. **Equation of Motion:**
- Dividing both sides by mL², we obtain: -gθ/L = α.
- The angular acceleration α is the second derivative of θ with respect to time, so we can write: -g/L * θ = d²θ/dt².
- This equation represents the equation of motion for a simple pendulum in SHM.
Hence, the equation of motion for a simple pendulum in SHM is given by:
d²θ/dt² + (g/L) * θ
A simple pendulum consists of a mass (bob) attached to a string or rod of negligible mass and fixed at a pivot point. When the pendulum is displaced from its equilibrium position and released, it oscillates back and forth. The motion of a simple pendulum can be described by Simple Harmonic Motion (SHM). Let's derive the equation of motion for a simple pendulum in SHM.
**Assumptions:**
1. The string or rod is massless and inextensible.
2. The angle of displacement is small, so we can use the small-angle approximation.
**Derivation:**
1. **Defining Variables:**
- Let 'm' be the mass of the bob.
- Let 'L' be the length of the string or rod.
- Let 'θ' be the angular displacement of the pendulum from the vertical equilibrium position.
- Let 'g' be the acceleration due to gravity.
2. **Forces Acting on the Pendulum:**
- The weight of the bob acts vertically downwards and can be decomposed into two components: mg sin(θ) along the radial direction and mg cos(θ) along the tangential direction.
- The tension in the string or rod acts along the tangential direction towards the pivot point.
- The net force acting on the bob is the sum of the tangential components: T - mg cos(θ), where 'T' is the tension in the string or rod.
3. **Angular Acceleration:**
- The torque acting on the bob is given by the product of the force and the perpendicular distance from the pivot point, which is 'L' in this case.
- The torque can be written as: τ = (T - mg cos(θ)) * L.
- According to Newton's second law for rotational motion, τ = Iα, where 'I' is the moment of inertia and 'α' is the angular acceleration.
- For a simple pendulum, the moment of inertia is given by I = mL².
- Substituting the values, we get: (T - mg cos(θ)) * L = mL² * α.
4. **Restoring Force and SHM:**
- The restoring force is the component of the net force that acts towards the equilibrium position.
- The restoring force can be written as: F = -mg sin(θ).
- Using the small-angle approximation sin(θ) ≈ θ for small θ, we have F ≈ -mgθ.
- From the equation of angular acceleration, we can substitute τ = Iα as L * F = mL² * α.
- Simplifying the equation, we get: -mgθ = mL² * α.
5. **Equation of Motion:**
- Dividing both sides by mL², we obtain: -gθ/L = α.
- The angular acceleration α is the second derivative of θ with respect to time, so we can write: -g/L * θ = d²θ/dt².
- This equation represents the equation of motion for a simple pendulum in SHM.
Hence, the equation of motion for a simple pendulum in SHM is given by:
d²θ/dt² + (g/L) * θ
Attention Class 11 Students!
To make sure you are not studying endlessly, EduRev has designed Class 11 study material, with Structured Courses, Videos, & Test Series. Plus get personalized analysis, doubt solving and improvement plans to achieve a great score in Class 11.


|
Explore Courses for Class 11 exam
|
|
Similar Class 11 Doubts


Top Courses for Class 11View all




Derivation of simple pendulum in SHM?
Question Description
Derivation of simple pendulum in SHM? for Class 11 2024 is part of Class 11 preparation. The Question and answers have been prepared according to the Class 11 exam syllabus. Information about Derivation of simple pendulum in SHM? covers all topics & solutions for Class 11 2024 Exam. Find important definitions, questions, meanings, examples, exercises and tests below for Derivation of simple pendulum in SHM?.
Derivation of simple pendulum in SHM? for Class 11 2024 is part of Class 11 preparation. The Question and answers have been prepared according to the Class 11 exam syllabus. Information about Derivation of simple pendulum in SHM? covers all topics & solutions for Class 11 2024 Exam. Find important definitions, questions, meanings, examples, exercises and tests below for Derivation of simple pendulum in SHM?.
Solutions for Derivation of simple pendulum in SHM? in English & in Hindi are available as part of our courses for Class 11.
Download more important topics, notes, lectures and mock test series for Class 11 Exam by signing up for free.
Here you can find the meaning of Derivation of simple pendulum in SHM? defined & explained in the simplest way possible. Besides giving the explanation of
Derivation of simple pendulum in SHM?, a detailed solution for Derivation of simple pendulum in SHM? has been provided alongside types of Derivation of simple pendulum in SHM? theory, EduRev gives you an
ample number of questions to practice Derivation of simple pendulum in SHM? tests, examples and also practice Class 11 tests.
|
|
Explore Courses for Class 11 exam
|
|
Suggested Free Tests
Signup for Free!
Signup to see your scores go up within 7 days! Learn & Practice with 1000+ FREE Notes, Videos & Tests.




|
© EduRev
|
Education Revolution
|



Follow Us
|








Signup to see your scores
go up within 7 days!
Access 1000+ FREE Docs, Videos and Tests
Takes less than 10 seconds to signup